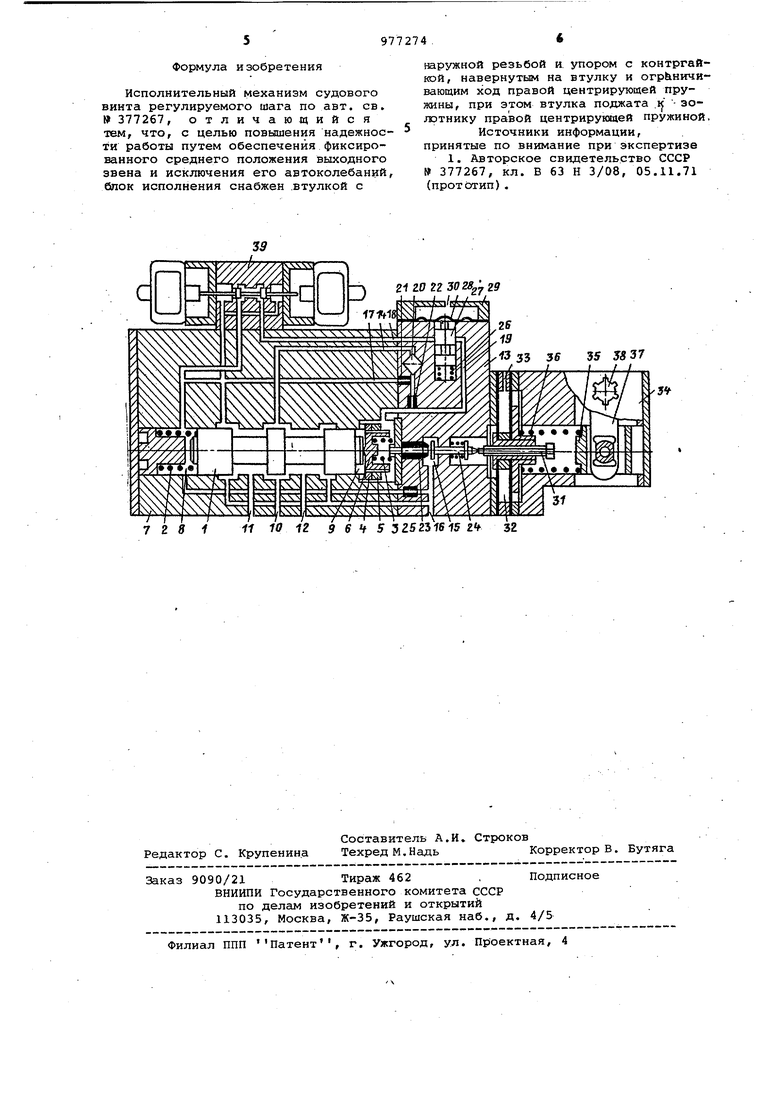
каналы 11 и 12, по которым рабочая жидкость поступает к полостям гидроцилиндра механизма изменения шага. . Блок управления включает корпус 13 с входным каналом 14, сливной камерой 15, сливньлм каналом 16, выходным каналом 17 и каналами 18 и 19, фильтр 20, балансные дроссели 21 и 22, управляющий дроссель, состоящий из сопла 23 и заслонки 24, дроссель 25, гидравлический клапан ИЛИ, соетоящий из пружины 26, плунжера 27, мембраны 28 и корпуса 29 с каналом 30 подвода дискретного пневматическо го отключающего сигнала. Блок сравнения сигналов команды и обратной связи включает винт 31 и мембранный пакет 32 с каналом 33 под вода аналогового пневматического управляющего сигнала. Блок обратной связи включает корпус 34, ползун 35, пружину- 36, рычаг 37 и шлицевой валик 38. На корпусе 7 блока исполнения установлен гидравлический золотник 39, имеющий днсгтанционное электрическое управление. Устройство работает следующим образом. При нормальном функционировании пневматической системы дистанционного управления механизмом изменения шага ВРШ электромагниты золотника 39 обесточены, плунжер золотника 39 зан мает среднее положение, в канал 30 подведен дискретный пневматический отключающий сигнал значением , плунжер 27 при этом, сжимая- пружину 26, своим пояском перекрывает, каналы 18 и 19, тем самым разобщая межгдроссельные камеры 8 и 9. . При установившемся значении аналогового пневматического управляющег сигнала, подводимого в канал 33,уси лие, развиваемое воздухом на мембран ном пакете 32, уравновешено натяжением пружины 3-6,а проводимость управляющего дросселя, которая определяется зазором между соплом 23 и зас лонкой 24, обеспечивает равенство давлений в междроссельных камерах 8 и 9 блока исполнения. Выходное звено золотника 1 под воздействием правой центрирующей пружины 3,- которая имеет большую жесткость по сравнению с левой центрирующей пружиной 2 по механическому упору 4 занимает фиксированное среднее положение, соот-1 ветствующее режиму удержания лопастей ВРШ. При изменении значения управлающего пневматического сигнала, например увеличении, мембранный пакет 32 блока сравнения смещается вправо, сжимая пружину 36 и увеличивая зазор между соплом 23 и заслонкой 24. Проводимость управляющего дросселя увеличивается, давление в междроссельной камере 9 блока исполнения понижается, в результате чего золотник 1 перемещается вправо. При этом одна полость механизма изменения шага соединяется со сливом, а другая - с нагнетанием, начинается перекладка, которая происходит до тех пор, пока |усилие пружины 36, сжимаемой приво- дом обратной связи через шлицевЬй валик 38, рычаг 37, ползун 35, не уравновесит усилие, развиваемое на мембранном пакете 32 блока сравнения новым, увеличенным значением аналогового пневматического управляющего сигнала. Между соплом 23 и заслонкой 24 устанавливается зазор, обеспечивающий равенство давлений в междроссельных камерах В и 9, и золотник 1 под воздействием правой центрирующей пружины 3 по упору 4 занимает среднее положение, что соответствует режиму удержания. При уменьшении значения аналогового пневматического управляющего сигнала механизм работает в обратном порядке. При аварийном нарушении нормального функционирования пневматической дистанционной системы управления ВРШ дискретный отключающий сигнал, подводимый в канал 30, принимает значение 30, принимает значение О и плунжер 27 под воздействием пружины 26 занимает крайнее верхнее положение, врезультата чего междроссельные камеры 8 и 9 соединяются между собой через каналы 18 и 19, проточку плунжера 27 и золотник 39. В междроссельных, камерах 8 и 9 корпуса 7 блока исполнения.давления становятся равными, золотник под воздействием правой центрирующей пружины 3 по упору 4 находится в среднем положении, что соответствует режиму удержания лэпастей ВРШ в положении, которое было к моменту отказа пневматической системы управления. Аварийное управХЕНие ВРШ осуществляется посредством золотника 39. При йклюаении правого электромагнита камера 8 корпуса блока исполнения соединяется со сливом, золотник 1 смещается влево, обеспечивая перекладку лопастей ВРШ. При включении левого электромагнита со сливом соединяется камера 9, золот- . ник 1 смещается вправо, обеспечивая .соответственно перекладку лопастей :ВРШ в противоположномнаправлении. Изобретение дает возможность увеличить надежность работы исполнитель.ного механиз1-1а судового ВРШ, благодаря обеспечению;фиксированного полэженн лопастей ВРШ, и тем самым избежать аварийных ситуаций судна в процессе плавания.
Формула изобретения
Исполнительный механизм судового винта регулируемого шага по авт. св. 377267, отличающийся тем, что, с целью повышения надежности работы путем обеспечения фиксированного среднего положения выходного эвена и исключения его автоколебаний, блок исполнения снабжен .втулкой с
наружной резьбой и упором с контргайкой, навернутым на втулку и огрЬничивающим ход правой центрирующей пружины, при этом втулка поджата .ij - эолэтнику правой центрирующей пружиной.
Источники информации, принятые по внимание при экспертизе
1. Авторское свидетельство СССР № 377267, кл. В 63 Н 3/08, 05.11.71 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПО.[!11ИТГ-.ПЬНЫЙ МЕХАНИЗМ СУДОВОГО ВИНТА Р t ГУЛ и РУ ЕМО ГО 1П А ГА?»:-гО'>&К'>&зНр>&<-^^^^^:т^^^^'^'>&^\,i^j''^^-. | 1973 |
|
SU377267A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СУДОВОГО ВИНТА РЕГУЛИРУЕМОГО ШАГА | 1972 |
|
SU330069A1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ РЕГУЛИРУЕМЫМ АКСИАЛЬНО-ПОРШНЕВЫМ НАСОСОМ | 1991 |
|
RU2018708C1 |
| ГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ | 1971 |
|
SU308234A1 |
| Регулятор расхода рабочей жидкости | 1989 |
|
SU1667020A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ-ПРЕОБРАЗОВАТЕЛЬ | 2006 |
|
RU2330191C2 |
| ГРЕБНОЙ ВИНТ РЕГУЛИРУЕМОГО ШАГА | 1967 |
|
SU204163A1 |
| Прореживатель сахарной свеклы | 1988 |
|
SU1639447A1 |
| Следящий привод | 1976 |
|
SU636423A1 |
| Электрогидравлический усилитель | 1976 |
|
SU723238A1 |
Hi Tifc ... i 11 iblllfclMliblll l. Vl-Г It - Т f 1 -- ДЦ ,M,t
728111 10 12 9 6 f 532523f615 V 2120 22 30 Z8 29 l-t I PR 35
32 в37 I/
