Известны исполнительные механизмы судовых винтов регулируемого шага, содержащие блоки управления, обратной связи, исполнения и кран переключения, установленный в блоке управления.
Цель изобретения - повысить надежность механизма в работе, уменьшить время аварийной перекладки лопастей винта регулируемого шага и упростить конструкцию. Это достигается тем, что кран переключения блока управления выполнен с дросселирующей щелью.
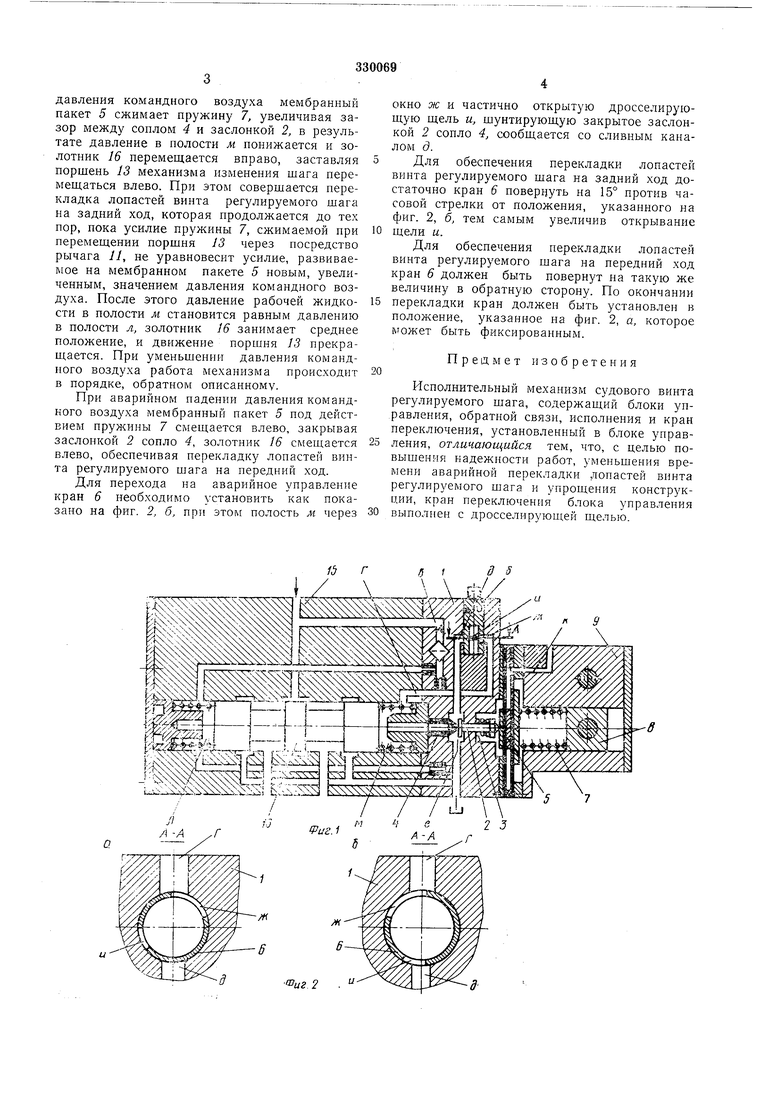
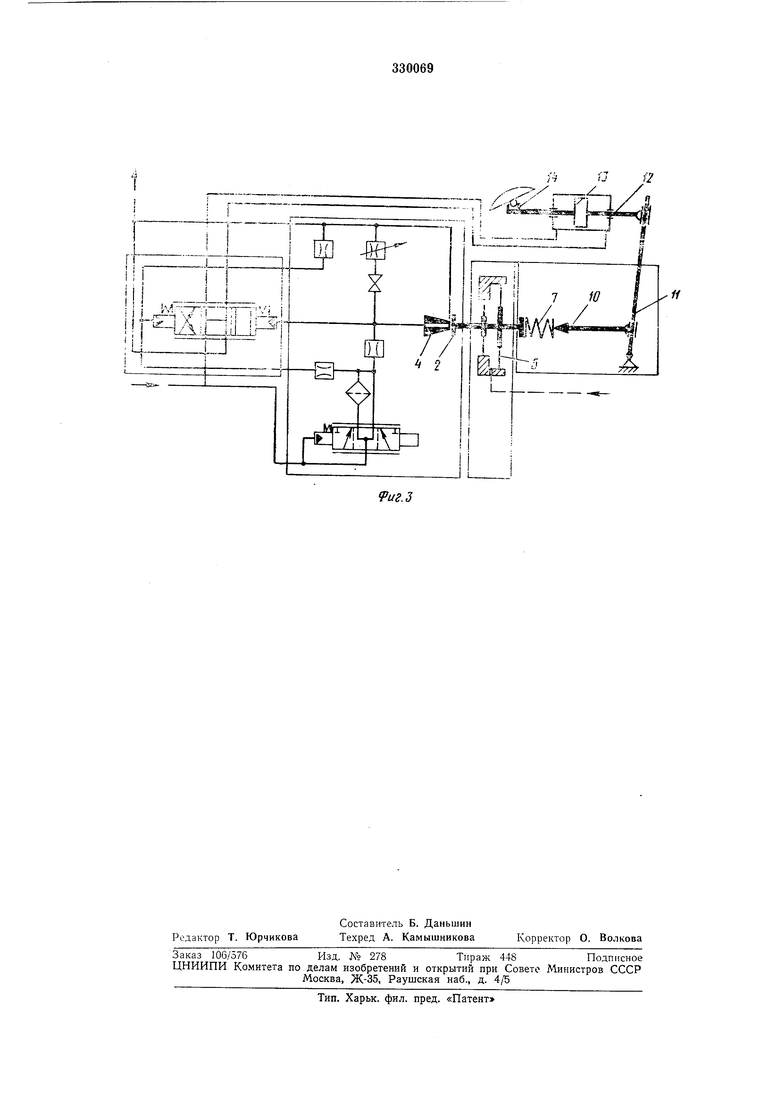
На фиг. 1 схематически изображен описываемый исполнительный механизм в разрезе; на фиг. 2 - сечение по Л-А на фиг. 1 (положение крана при автоматической а и аварийной б работе); на фиг. 3 - принципиальная схема работы исполнительного механизма.
Корпус / блока управления исполнительного механизма выполнен со входным каналом в, каналом г, сливным каналом д и сливной камерой е.
В корпусе 1 подвижно установлены заслонка 2 с пружиной 3, взаимодействующая с соплом 4 и мембранным пакетом 5, а также кран 6 переключения исполнительного механизма с окном ж и дросселирующей щелью и. Мембранный пакет соединен каналом к с источником командного воздуха (на
фигурах не показан) и взаимодействует с пружиной 7 и ползуном 5, установленными в корпусе 9 блока обратной связи. Ползун шарнирно прикреплен посредством тяги 10 к рычагу 11, свободный конец которого соединен со штоком 12 поршня 13 механизма 14 изменения шага судового винта (прикрепление ползуна к тяге и судовой винт на фигурах не показаны).
К корпусу 1 блока управления прикреплен корпус 15 блока исполнения. В корпусе установлен золотник 16, образуюший полости л постоянного давления и м переменного давления.
Исполнительный механизм работает следующим образом.
При установившемся положении поршня 13 (при автоматической работе) усилие, развиваемое на мембранном пакете 5 давлением командного воздуха, поступающего по каналу к, уравновешенно натяжением пружины.
Между соплом 4 и заслонкой 2 имеется зазор, обеспечивающий равенство давлений рабочей жидкости в полостях л ъ м корпуса 15, в результате чего золотник 16 занимает среднее положение. При этом рабочая жидкость поступает в полость ж через канал г в корпусе / и вытекает через сопло 4 в сливную камеру е.
давления командного воздуха мембранный пакет 5 сжимает пружину 7, увеличивая зазор между сонлом 4 и заслонкой 2, в результате давление в нолости ж понижается и золотник 16 перемещается вправо, заставляя поршень 13 механизма изменения шага перемешаться влево. При этом совершается перекладка лопастей винта регулируемого шага на задний ход, которая продолжается до тех пор, пока усилие пружины 7, сжимаемой при перемещении поршня 13 через посредство рычага 11, не уравновесит усилие, развиваемое на мембранном пакете 5 новым, увеличенным, значением давления командного воздуха. После этого давление рабочей жидкости в полости м становится равным давлению в полости л, золотник 16 занимает среднее положение, и движение поршня 13 прекращается. При уменьшении давления командного воздуха работа механизма происходит в порядке, обратном описанному.
При аварийном падении давления командного воздуха мембранный пакет 5 под действием пружины 7 смешается влево, закрывая заслонкой 2 сопло 4, золотник 16 смешается влево, обеспечивая перекладку лопастей винта регулируемого шага на передний ход.
Для перехода на аварийное управление кран 6 необходимо установить как показано на фиг. 2, б, при этом полость м через
окно ж и частично открытую дросселирующую щель и, шунтирующую закрытое заслонкой 2 сопло 4, сообщается со сливным каналом д.
Для обеспечения перекладки лопастей винта регулируемого щага на задний ход достаточно кран 6 повернуть на 15° против часовой стрелки от положения, указанного на фиг. 2, б, тем самым увеличив открывание
щели и.
Для обеспечения перекладки лопастей винта регулируемого шага на передний ход кран 6 должен быть повернут на такую же величину в обратную сторону. По окончании
перекладки кран должен быть установлен в положение, указанное на фиг. 2, а, которое может быть фиксированны.м.
Предмет изобретения
Исполнительный механизм судового винта регулируемого шага, содержащий блоки управления, обратной связи, исполнения и кран переключения, установленный в блоке управления, отличающийся тем, что, с целью повышения надежности работ, уменьшения времени аварийной перекладки лопастей винта регулируемого шага и упрошения конструкции, кран переключения блока управления выполнен с дросселирующей щелью.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СУДОВОГО ВИНТА РЕГУЛИРУЕМОГО ШАГА | 1972 |
|
SU355065A1 |
| Исполнительный механизм судового винта регулируемого шага | 1981 |
|
SU977274A2 |
| ИСПО.[!11ИТГ-.ПЬНЫЙ МЕХАНИЗМ СУДОВОГО ВИНТА Р t ГУЛ и РУ ЕМО ГО 1П А ГА?»:-гО'>&К'>&зНр>&<-^^^^^:т^^^^'^'>&^\,i^j''^^-. | 1973 |
|
SU377267A1 |
| Гидравлическая судовая рулевая машина | 1981 |
|
SU958227A1 |
| СИСТЕМА УПРАВЛЕНИЯ ФЛЮГЕРНО-РЕВЕРСИВНЫМ ВОЗДУШНЫМ ВИНТОМ ДЛЯ САМОЛЕТОВ МЕСТНЫХ АВИАЛИНИЙ | 1996 |
|
RU2099241C1 |
| ПНЕВМАТИЧЕСКАЯ СИСТЕМА ДИСТАНЦИОННОГО | 1969 |
|
SU254355A1 |
| Гидравлический привод судовой рулевой машины | 1984 |
|
SU1197939A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СТВОРОК РЕАКТИВНОГО СОПЛА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1991 |
|
RU2030626C1 |
| Гидравлический привод | 1981 |
|
SU964265A1 |
| Гидравлический привод судовой рулевой машины | 1977 |
|
SU695896A1 |
i- fe L±Zltf
