(54) ИНЕРЦИОННЫЙ КОНВЕЙЕР
1
Изобретение относится к подъемнотранспортному машиностроению, а именно к инерционным конвейерам, и может быть использовано для транспортирования мелкодисперсных материалов, например поваренной соли.
Известен инерционный конвейер, включающий жесткий короб и привод к нему в виде кулачкового механизма со сдвоенным кулачком и двухроликовым толкателем, заключенным в редук-. торный корпус
Недостатки указанного конвейера громоздкость и значительная инерционность короба, склонного к залипанию транспортируемым материалом, а также сложность кулачкового механизма из-за применения сдвоенного кулачка, требующего повы1 енной точности изготовления, а также неудовлетворительные динамические условия работы этого механизма, так как кулачки профилируются на получение максимальной амплитуды колебаний короба.
Наиболее близким к предлагаемому является инерционный конвейер, включаюсшй раму с опорными роликами, гибкую виброленту, пропущенную через отклоняклдий и дополнительный барабан, и размеренный между ними кривошип
с роликом, установленным на приводном валу 2 .
Недостатком иэвеса;ного конвейера является недостаточно высокая надежность .транспортирования из-за невозможности получения оптимальной диаграммы движения виброленты с помощью кривошипно-роликового возбудителя колебаний.
to
Цель изобретения - повмиение на дежности транспортирования.
Указанная цель достигается тем, что в инерционном конвейере, включающем раму с опорными роликами, гибкую
15 виброленту, пропущенную через отклоняющий и дополнительный барабаны, и размещенный между ними кривошип с роликом, установленным на приводном валу, дополнительный барабан установ20лен с возможностью качания вокруг своей оси, которая связана с приводным валом кривошипа посредством кулачкового механизма, выполненного из толкателя, закрепленного на оси
25 дополнительного барабана, и кулачка, закрепленного на приводном валу кривошипа.
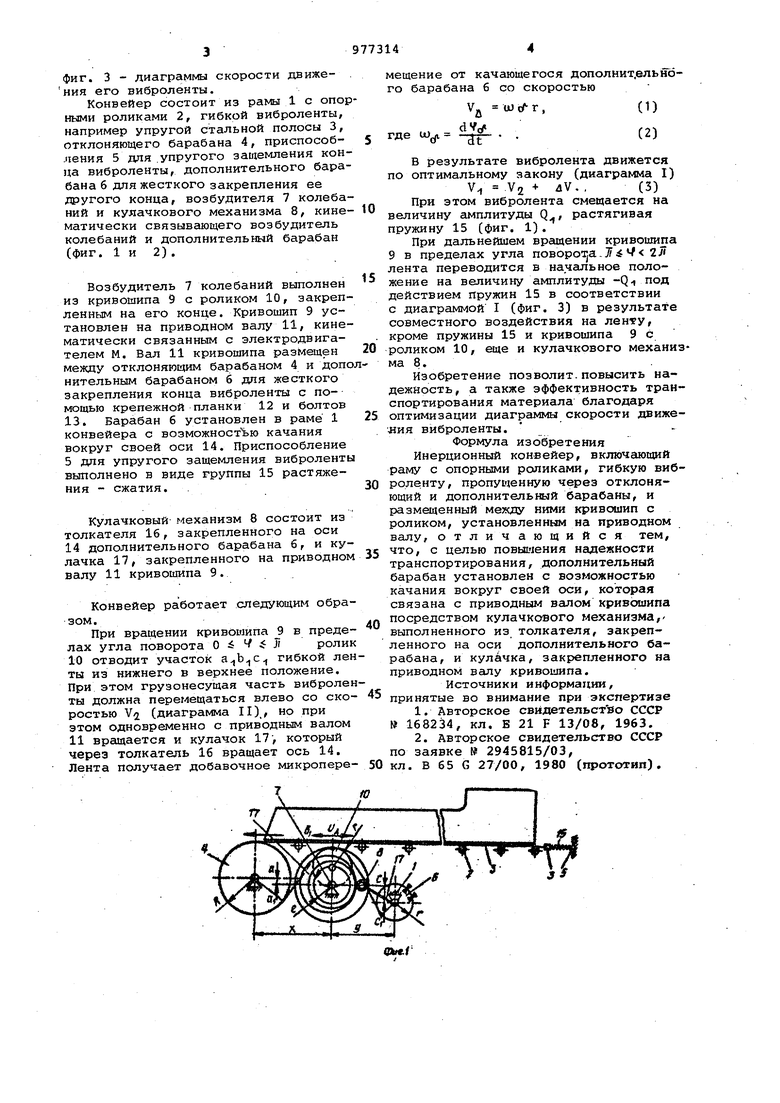
На фиг. 1 схематично изображен инерционный конвейер, общий вид;
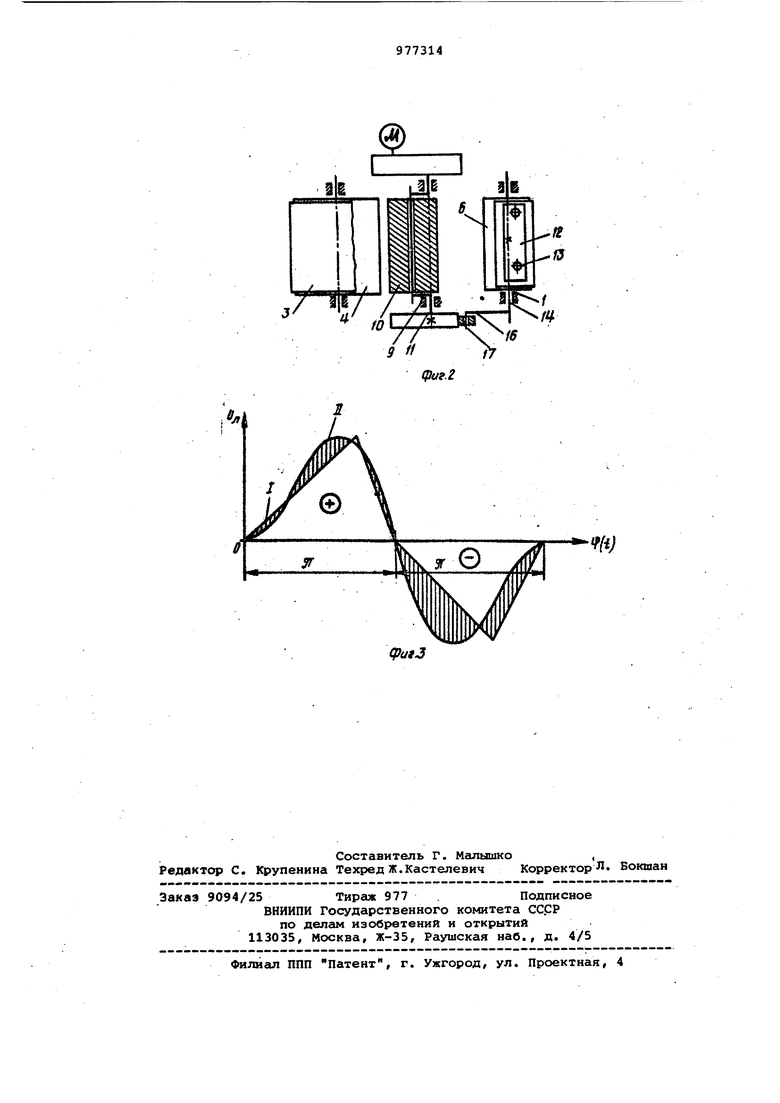
30 на фиг. 2 -то же, вид в плане; на . фиг. 3 - диаграммы скорости движения его виброленты. Конвейер состоит из рамы 1 с опор ными роликами 2, гибкой виброленты, например упругой стальной полосы 3, отклоняющего барабана 4, приспособления 5 для.упругого защемления кон ца виброленты, дополнительного бара бана б для жесткого закрепления ее другого конца, возбудителя 7 колеба ний и кулачкового механизма 8, кине матически связывающего возбудитель колебаний и дополнительный барабан (фиг. 1 и 2) . Возбудитель 7 колебаний выполнен из кривошипа 9 с роликом 10, закрепленным на его конце. Кривошип 9 установлен на приводном валу 11, кинематически связанным с электродвигателем М. Вал 11 кривошипа размещен между отклоняющим барабаном 4 и допо нительным барабаном 6 для жесткого закрепления конца виброленты с помощью крепежной планки 12 и болтов 13. Барабан 6 установлен в раме 1 конвейера с возможностью качания вокруг своей оси 14. Приспособление 5 для упругого защемления виброленты выполнено в виде группы 15 растяжения - сжатия. Кулачковый механизм 8 состоит из толкателя 16, закрепленного на оси 14 дополнительного барабана б, и кулачка 17/ закрепленного на приводном валу 11 кривощипа 9. Конвейер работает следующим образом. При вращении кривошипа Э в пределах угла поворота О / Ji ролик 10отводит участок гибкой лен ты из нижнего в верхнее положение. При этом грузонесущая часть виброле ты должна перемещаться влево со око ростью V (диаграмма II),, но при этом одновременно с приводным валом 11вращается и кулачок 17 который через толкатель 16 вращает ось 14. Лента получает добавочное микропере мещение от качающегося дополнит.ельного барабана б со скоростью ЮсЛг, «- В результате вибролента движется по оптимальному закону (диаграмма I) V .Vo - лУ, , При этом вибролента смещается на величину ё1мплитуды Q, растягивая пружину 15 (фиг. 1). При дальнейшем вращении кривошипа 9 в пределах угла поворот а J 2 Л лента переводится в начальное положение на величину амплитуды -Q под действием пружин 15 в соответствии с диаграммой I (фиг. 3) в результате совместного воздействия на ленту, кроме пружины 15 и кривошипа 9 с роликом 10, еще и кулачкового механизма 8. Изобретение позволит.повысить надежность, а также эффективность тран спортирования материала благодаря оптимизации диаграммы скорости движе«ия виброленты. Формула изобретения Инерционный конвейер, включающий раму с опорными роликами, гибкую виброленту, пропущенную через отклоняющий и дополнительный барабаны, и размещенный между ними кривошип с роликом, установленным на приводном валу, отличающийся тем, что, с целью повысюния надежности транспортирования, дополнительный барабан установлен с возможностью качания вокруг своей оси, которая связана с приводным валом кривошипа посредством кулачкового механизма, выполненного из толкателя, закрепленного на оси дополнительного барабана, и кулачка, закрепленного на приводном валу кривошипа. Источники информации, принятые во внимание при экспертизе 1.Авторское свйдетельство СССР № 168234, кл. В 21 F 13/08, 1963. 2.Авторское свидетельство СССР по заявке 2945815/03, кл. В 65 G 27/00, 1980 (прототип).
j/Ж
| название | год | авторы | номер документа |
|---|---|---|---|
| Качающийся конвейер | 1982 |
|
SU1047792A1 |
| Устройство для завертывания прямоугольных предметов | 1981 |
|
SU977287A1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Шаговый конвейер | 1990 |
|
SU1787881A1 |
| УСТРОЙСТВО ДЛЯ КОНТАКТНОЙ СВАРКИ ПРОДОЛЬНЫХ И ПОПЕРЕЧНЫХ СТЕРЖНЕЙ СЕТЧАТЫХ КОНСТРУКЦИЙ | 1992 |
|
RU2024371C1 |
| Накопительный конвейер штучных грузов | 1989 |
|
SU1676958A1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279391C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЛЕНТОЧНОГО МАТЕРИАЛА | 1994 |
|
RU2081798C1 |
| Устройство для упаковки сыпучего материала в клапанные мешки | 1982 |
|
SU1113308A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 1969 |
|
SU239852A1 |