/ т /г. т I
6 29 28 Z7 26 22 19 21 20 17
Фиг /
7 vaw
2.5 t 51
Изобретение относится к промышленному транспорту, а точнее к устройствам для внутрицеховых перевозок и накопления штучных грузов, например, транспортных колесных контейнеров.
Цель изобретения - повышение надежности работы конвейера.
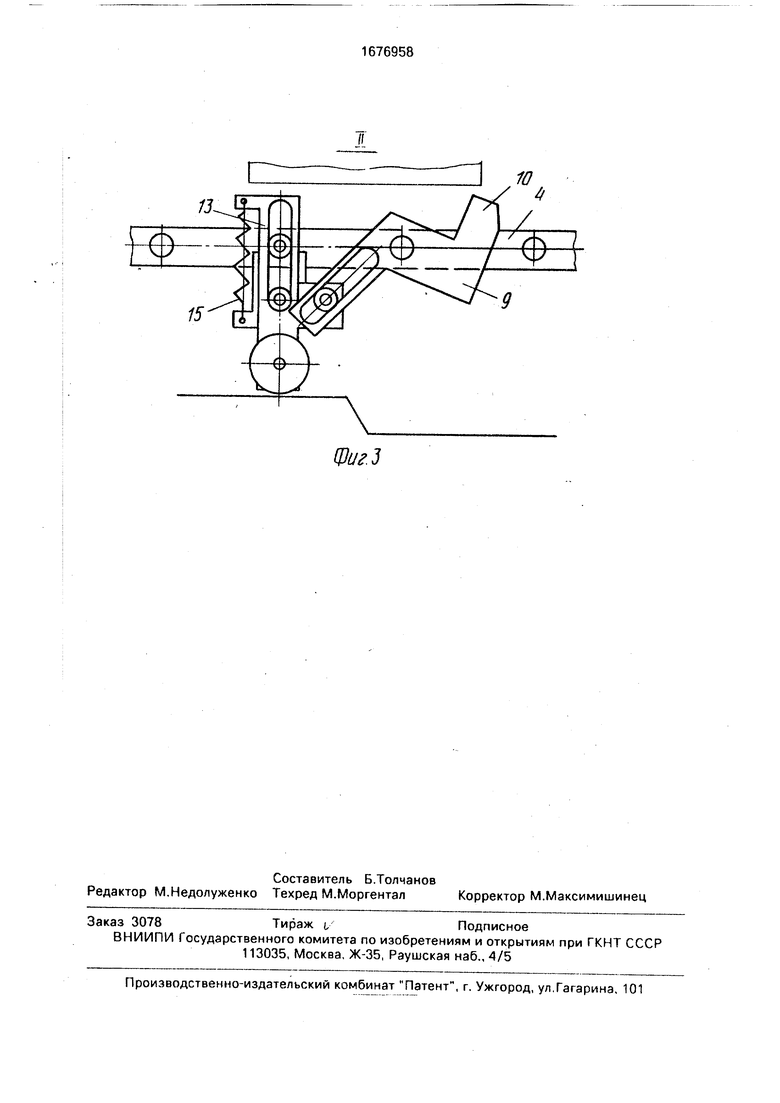
На фиг. 1 изображен описываемый накопительный конвейер, вид сбоку, на фиг. 2 - узел I на фиг. 1; на фиг. 3 - узел И на фиг. 1.
Стрелками на фиг. 1-3 показано направление движения.
Накопительный конвейер штучных грузов содержит раму 1 (фиг. 1) с направляющими 2, между которыми размещены передаточный механизм, предназначенный для транспортирования и накопления штучных грузов, например транспортных колесных контейнеров 3. Форма направляющих 2 зависит от опорной поверхности штучного груза и может быть выполнена в виде рельсов или неприводных роликовых дорожек. Передаточный механизм состоит из приводного гибкого тягового органа в виде тяговой пластинчатой цепи 4, огибающей звездочки 5, 6, на которой равномерно по контору смонтированы захваты 7, и рычажно-кулач- кового устройства, предназначенного для управления захватами 7. Каждый захват 7 (фиг. 2, 3) выполнен в виде закрепленных в вертикальной плоскости на цепи 4 с помощью шарнира 8 зацепа 9, снабженного выступающим пальцем 10, для взаимодействия с упором 11 на контейнере 3 и наклон- ным пазом 12, а также толкателя 13, связанного с зацепом 9 с помощью ролика 14, установленного в пазу 12. При этом палец 10 и паз 12 размещены на зацепе по обе стороны от шарнира 8, а толкатель 13 закреплен с возможностью вертикального перемещения и подпружинен в сторону цепи 4 пружиной 15, причем нижний конец толкателя снабжен катком 16 для взаимодействия с рычажно-кулачковым устройством.
Рычажно-кулачковое устройство (фиг. 1) содержит на каждой позиции накопления закрепленный в вертикальной плоскости на раме 1 с помощью шарнира 17, двуплечий рычаг 18, нижнее плечо которого кинематически соединено с помощью шарниров 19, 20 и тяги 21с плоским промежуточным кулачком 22, а верхнее снабжено катком 23, предназначенным для взаимодействия с поперечной балкой 24, имеющей наклонные боковые стенки и закрепленной на основание контейнера 3. Кулачок 22 закреплен на раме 1 с помощью шарнира 25 с возможностью ограниченного поворота в вертикальной плоскости и подпружинен в сторону
ограничителя 26, смонтированного на раме 1, пружиной 27. Подъем и опускание кулачка 22 производится наклоном двуплечего рычага под действием транспортируемого контейнера 3, причем опорная поверхность кулачка 22 в крайнем верхнем положении выполнена в виде наклонных и горизонтального участков и может взаимодействовать с катком 16 толкателя 13, при этом по ходу
0 движения груза и цепи 4, двуплечий рычаг 18 размещен за промежуточным кулачком, с которым он связан, а на позиции разгрузки установлен кулачок 28, имеющий форму кулачков 22 и соединен с электромагнитным
5 приводом 29, шарнирно закрепленным на раме 1. Накопительный конвейер штучных грузов работает в режиме накопления и в режиме выдачи грузов место загрузки справа, выгрузки слева, фиг. 1 и на них установлены погрузочно-рэзгрузочные механизмы
0 30,31.
Конвейер работает следующим образом.
Режим накопления. Погрузочно-разгрузочный механизм 30
5 устанавливает контейнер 3 на позицию загрузки. Включением привода 29 поднимают кулачок 28 в крайнее верхнее положение, при котором его опорная поверхность в виде наклонных и горизонтальных участков,
0 располагается в зоне взаимодействия последовательно движущихся катков 16 толкателей 13, закрепленных на ведущей ветви тяговой цепи 4, при этом кулачок 22 не взаимодействует с катками 16. Во время движе5 ния цепи 4 ближайший захват своим пальцем 10 зацепляет упор 11 контейнера 3 и транспортирует его в сторону кулачка 28, при этом контейнер своей балкой 24 последовательно взаимодействует с расположен0 ным по ходу двуплечим рычагом и движется без остановки до кулачка 28. При поступлении контейнера на позицию разгрузки каток 16 ведущего захвата наезжает на кулачок 28 и поднимает толкатель 13 вверх, что приво5 дит к повороту зацепа 9 и выходу пальца 10 из зацепления с упором 11 на контейнере 3. При этом двуплечий рычаг 18 на этой позиции отклоняется под действием балки 24 и поворачивает в крайнее верхнее положение
0 кулачок 22 на предыдущей позиции накопления. Следующий контейнер устанавливается на конвейер и подхватывается движущимся ближайшим к нему захватом. Транспортирование второго контейнера
5 производится до позиции накопления, где кулачок 22 поднят двуплечим рычагом 18, закрепленным на позиции разгрузки. По достижении места накопления толкатель 13 взаимодействует с поднятым кулачком 22 и
поворачивает зацеп 9 с пальцем 10, освобождая контейнер, а двуплечий рычаг 18 на этой позиции отклоняется балкой 24 второго контейнера и поднимает кулачок 22 на предыдущей позиции накопления.
Таким образом производится накопле- ние контейнеров 3 поступающих на конвейер в любой последовательности до полного заполнения, после чего привод 29 и привод тяговой цепи 4 должны быть отключены.
В режиме выдачи контейнеров конвей- ер работает следующим образом.
Погрузочно-рззгрузочный механизм 31 снимает первый контейнер на позиции разгрузки, что приводит к повороту двуплечего рычага на освобожденной позиции в верти- кальное положение и к опусканию кулачка 22 на предыдущей позиции накопления, в результате чего толкатель 13 на этой позиции опустится, а зацеп 9 повернется и захватит контейнер для транспортирования на позицию разгрузки. Это приведет к повороту двуплечего рычага на освободившейся позиции и к повороту кулачка 22 на предыдущей. Аналогичным образом производится разгрузка остальных, контейнеров.
Формула изобретения
Накопительный конвейер штучных грузов, включающий смонтированные на раме
направляющие для грузов, размещенный между ними передаточный механизм в виде приводного гибкого тягового органа с шар- нирно закрепленными на нем захватами в виде зацепов с выступающими пальцами и толкателем, установленным с возможностью взаимодействия с зацепами, отличающийся тем, что, с целью повышения надежности работы конвейера, он снабжен шарнирно закрепленными на раме промежуточными подпружиненными кулачками, ограничителями поворота промежуточных подпружиненных кулачков и двуплечими рычагами, расположенными вертикально за промежуточными подпружиненными кулачками по ходу перемещения приводного гибкого тягового ор-ана с возможностью влэимодействия с грузом и кинематически связанными нижними плечами с размещенными перед ними промежуточными подпружиненными кулачками, при этом каждый зацеп выполнен с пазом, а каждый толкатель - подпружиненным по вертикали, связан с зацепом посредством смонтированного на нем и размещенного в пазу последнего ролика и имеет каток для взаимодействия с подпружиненными кулачками, причем концевой подпружиненный кулачок выполнен приводным.

| название | год | авторы | номер документа |
|---|---|---|---|
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Цепной конвейер | 1982 |
|
SU1016238A1 |
| Цепной конвейер | 1975 |
|
SU573412A1 |
| Устройство для захвата и передачи штучных грузов с конвейера на конвейер | 1977 |
|
SU663644A1 |
| Вертикально-замкнутый тележечный конвейер | 1986 |
|
SU1364565A1 |
| КОНВЕЙЕРНАЯ СИСТЕМА ДЛЯ НАКОПЛЕНИЯ ТРАНСПОРТИРОВКИ ЗАКРЕПЛЕННОГО НА ТРОЛЛЕЯХ ШТУЧНОГО ГРУЗА | 1969 |
|
SU241990A1 |
| Устройство для перегрузки грузов на приемные конвейеры | 1988 |
|
SU1655874A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Устройство для перегрузки изделий | 1981 |
|
SU1022919A2 |
| Конвейер для распределения грузов | 1984 |
|
SU1273317A1 |
Изобретение относится к промышленному транспорту и позволяет повысить надежность работы конвейера. Конвейер содержит смонтированные на раме 1 направляющие 2 для грузов в виде колесных конвейеров (КК) 3 и размещенный между направляющими 2 передаточный механизм. Последний выполнен в виде приводного гибкого тягового органа - цепи 4 с шарнир- но закрепленными на нем захватами 7. Каждый захват 7 выполнен в виде зацепа 9 с выступающим пальцем 10 и пазом 12 и подпружиненного по вертикали толкателя (Т) 13 с роликом, размещенным в пазу 12, и катком 16. На раме 1 закреплены промежуточные подпружиненные и концевой приводной кулачки 22, 28. За кулачками 22 установлены двуплечие рычаги 18, взаимодействующие одним концом с поперечной балкой 24 КК 3, а другим связаны с кулачком 22. На направляющие 2 поступает КК 3. захватывается зацепом 9 и перемещается до поднятого кулачка 28. Каток 16 взаимодействуете кулачком 28 и поднимает Т 13. Последний через ролик 14 ловбрачивает захват 7 и выводит зацеп 9 из взаимодействия с КК 3. Последний через рычаг 18 пово-1 рачивает кулачок 22 и при проходе через него захвата 7 Т 13 поднимается и поворачивает зацеп 9 в нерабочее положение, выводя его из взаимодействия с последующим КК 3. 3 ил.
J
В
Фиг. г
(Pt/t.3
| Тележечный конвейер | 1980 |
|
SU918198A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Цепной конвейер | 1976 |
|
SU673550A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
