Известны шагающие конвейеры для транспортирования штучных грузов, содержащие неподвижную и подвижную рамы. ПоДвижная рама снабжена приводом для сообщения ей возвратно-поступательного движения и эксцентриковыми механизмами подъема, приводимыми IB движение от этого же привода.
Предложенный конвейер отличается тел1, что подвижная ,рама выпоутнена в виде отдельных -секций, связанных между собой механизмом изменения шага перемещения грузов.
Механизм изменеиия шага перемещения грузов состоит из двух пар зубчатых реек, из которых одна пара закреплена на неподвижной раме, а другая лара- на одной .из секций подвижлой рамы, и двух блоков шестерен, закрепленных я а другой соседней секции подвижной рамы и находящихся в зацеплении с рейками.
Благодаря этому возможно изменение шага перемещения грузов.
Для отключения участков конвейера без нарушения его работы эксцентриковые механизмы подъема подвижной рамы снабжены кулачковыми муфтами с электромагнитным приводом.
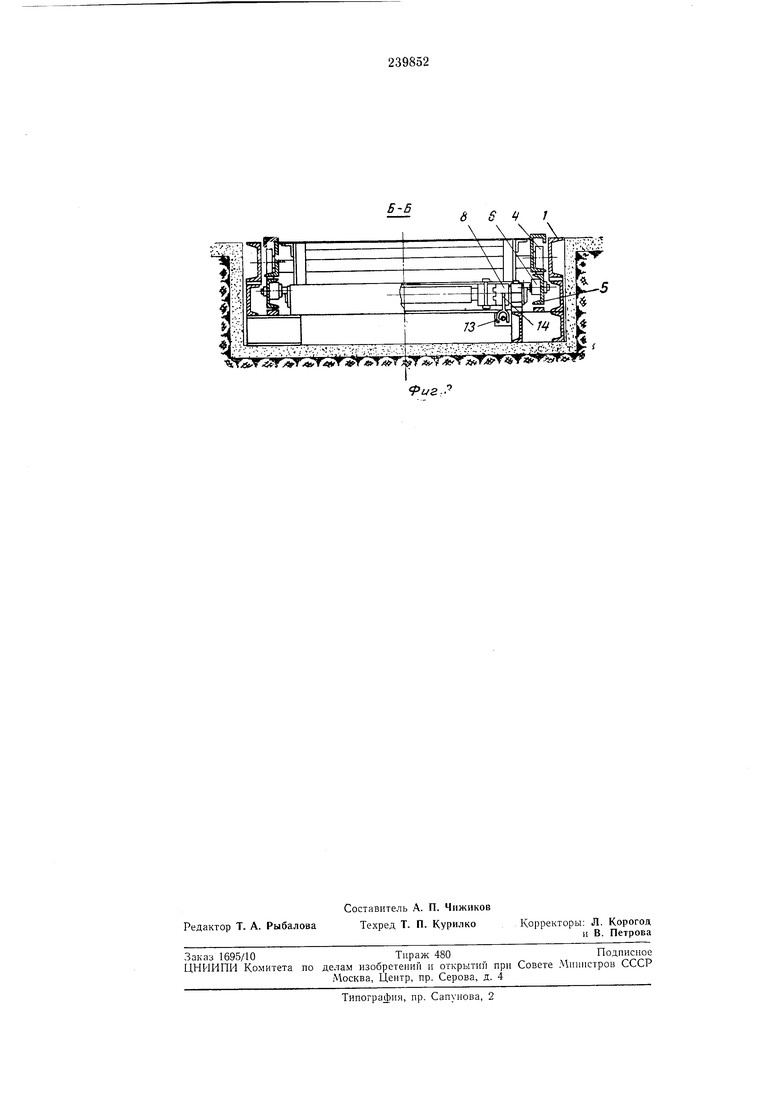
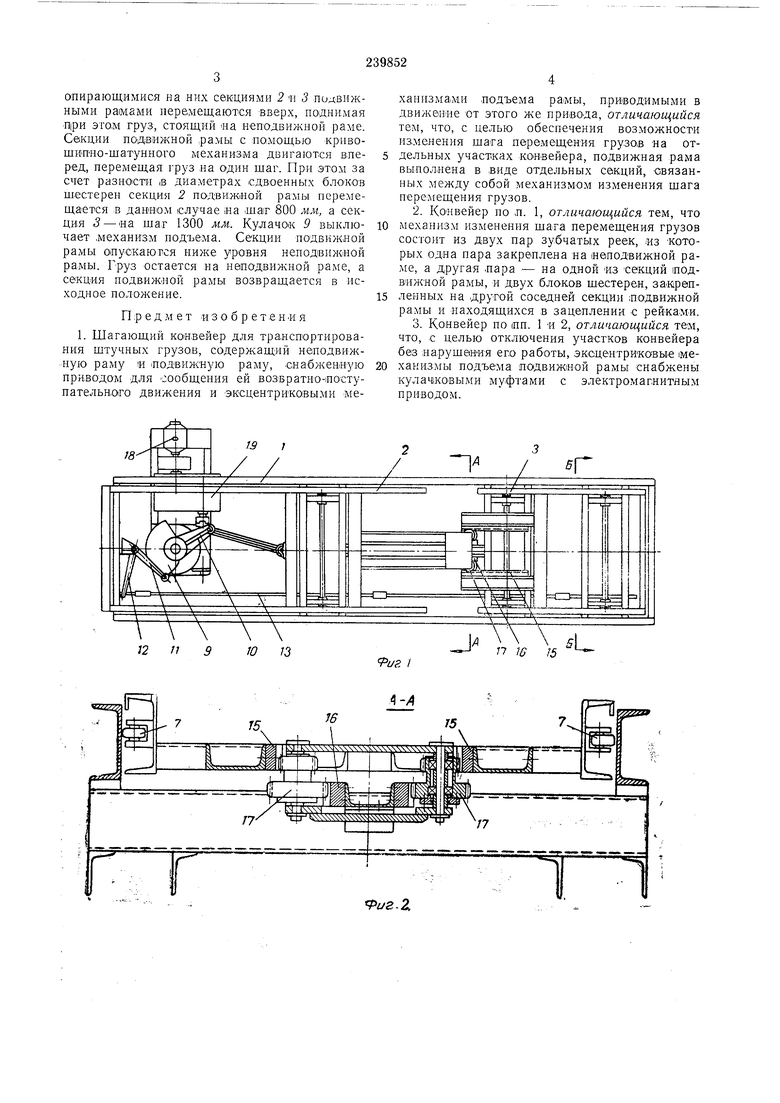
На фиг. 1 изображен шагающий конвейер, вид сверху; на фиг. 2-разрез по А-Л; на фиг. 3-разрез по Б-Б.
ции 2 и 3 подвижной рамы. Секции опираются роликами 4 на рельсовые пути 5, закрепленные на кривошипах эксцентриковых валов 6 механизма подъема подвижной рамы. От бокового смещения секции подвижной рамы удерживаются роликами 7.
Для включения эксцентриковых валов применены кулачковые муфты 8 с электромагнитным приводо м. Поворот эксцентриковых валов
осуществляется от кулачка 9, закрепленного на одной оси с Кривошипно-шатунным механизмом 10 привода через рычаги // и 12, тягу 13 и вилку 14. Секции подвижной рамы связаны между собой механизмом из;менения шага перемещения грузов, выполненным в виде двух зубчатых реек 15, смонтированных на секции 3 подвижной рамы, двух зубчатых реек 16, закрепленных «а неподвижной раме 1, и .сдвоенных блоков шестерен 17, находящихся в зацеплении с рейками и закрепленных на секции 2 подвижной рамы.
Кривошипно-шатунный механизм 10 соединен шарнирно с секцией 2 подвижной рамы и
приводится во вращение от электродвигателя 18 через редуктор 19.
При включении -кулачковых муфт 8 эксцентриковые валы от кулачка 9 через рычаги //, 12 и тягу 13, с помощью вилки 14 повора-чиопирающимися на них секциями 2 3 подвижными рамами перемещаются вверх, подии.мая цри эго.м груз, стоящий «а неподвижной раме. Секции подвижной рамы с по:мощью крнвошипНо-шатунного механизма двигаются вперед, перемещая груз на один шаг. При этом за счет разности ,в диаметрах сдвоенных блоков шестерен секция 2 подвижиой рамы перемеща1ется в даниом случае на шаг 800 мм, а секция 3 - «а шаг 1300 Л1М. Кулачок 9 выключает .механизм подъема. Секции подвижной рамы опускаются ниже уровня неподвижной рамы. Груз остается на неподвижной раме, а секция подвижной рамы возвращается в исходное положение.
Предмет изобретен и я
1. Шагающий конвейер для транспортирования штучных грузов, содержащий неподвижную раму и Подвижную раму, -снабженную приводом для сообщения ей возБратно-ноступательного движения и эксцентриковыми меI /2 и 9 Ю 13
ханизмами нодъема рамы, приводимыми в движение от этого же при(вода, отличающийся те.м, что, с целью обеспечения возможности изменения шага перемещения грузов на отдельных участках конвейера, подвижная рама выполнена в виде отдельных секций, связанных между собой механизмом изменения шага перемещения грузов.
2.Конвейер по л. 1, отличающийся тем, что механизм изменения шага перемещения грузов
состоит из двух пар зубчатых реек, из Которых одна пара закреплена на неподвижной раме, а другая .пара - на одной из секций подвижной рамы, и двух блоков шестерен, за«репленных на другой соседней секции подвижной рамы и находящихся в зацеплении .с рейками.
3.Конвейер по пп. 1 и 2, отличающийся тем, что, с целью отключения участков конвейера без нарушения его работы, эксцентриковые механизмы подъема подвижной рамы снабжены кулачковыми муфтами с электромагнитным приводом. -
f/s-Z И sL. J Г7 7/9 ;л --
S Jle A jSfT.fluT l i A Xf -tfTXf:
Б-Б
-%/ГЛТ
иг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1988 |
|
SU1546366A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2028975C1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 2009 |
|
RU2410315C1 |
| Шагающий конвейер для транспортирования цилиндрических грузов | 1980 |
|
SU908691A1 |
| Устройство для перегрузки штучных грузов | 1979 |
|
SU874501A1 |
| Реечный шагающий холодильник проката | 1987 |
|
SU1465145A1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 2001 |
|
RU2198831C2 |
| Устройство для ступенчатого перемещения штучных грузов | 1982 |
|
SU1089042A1 |
| Автоматическая линия для изготовления деталей типа спиц | 1986 |
|
SU1412932A1 |
| Перекладчик штучных грузов сшАгОВОгО КОНВЕйЕРА | 1979 |
|
SU848449A1 |