Изобретение относится к автоматическому управлению многомерными объектами, в частности к экстремальному регулированию инерционных объектов.
Известно устройство .цля поиска экстремума функционала входного сигнала объекта, реализующее градиентный способ, содержащее генератор пробных приращений, последовательно соединенные измеритель приращения функционала, вход которого связан с выходом объекта, исполнительный механизм и сумматор, выход которого связан с входом объекта, программное устройство, выходы которого связаны с управляющими входами исполнительного механизма и генератора пробных ( приращений, выход которого связан с вторым входом сумматора 1.
Недостатком данного устройства при управлении реальными инерционньами объектами являются большие затраты времени на определение частных производных функционала по входным сигналам с помощью пробных приращений и, следовательно, малая скорость поиска.
Наиболее близким к предлагаемому является устройство, содержащее
последовательно соединенные измеритель приращения функционала, ключ, блок логического управления, а также п каналов, каждый из которых содержит последовательно соединенные дополнительный ключ и исполнительный механизм 2 .
Недостатком этого устройства является ограниченная точность на10хождения экстремума функционала при заданной скорости поиска экстремума вследствие постоянной величины приращений входных сигналов. Увеличение точности нахождения экстремума
15 функционала в прототипе может быть достигнуто только путем уменьшения величины постоянных приращений входных сигналов, т.е. ценой уменьшения скорости поиска экстремума.
20 Таким образом, величину постоянного приращения выбирают исходя из противоречивых требований точности нахождения и скорости поиска экстремума функционала.
25
Цель изобретения - повышение точности и скорости поиска экстремума функционала.
Указанная цель достигается тем, что устройство содержит коммутатор
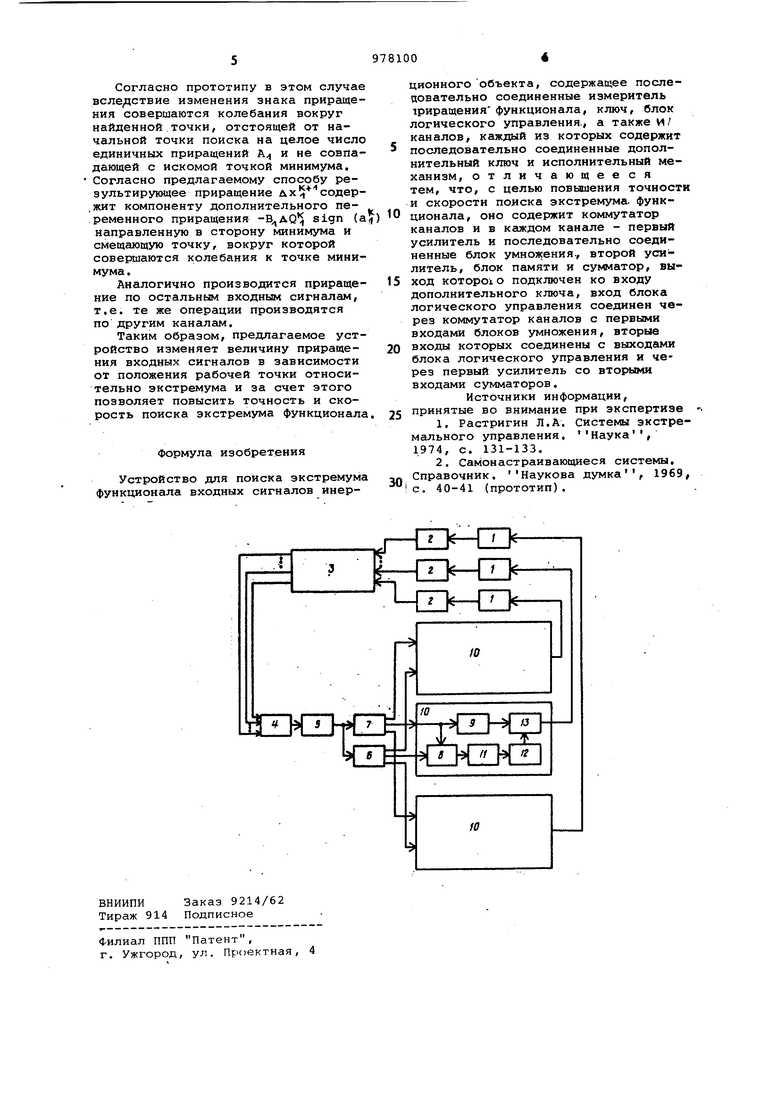
30 каналов и в каждом канале - первый усилитель и последовательно соединенные блок умножения, второй усилитель, блок памяти и сумматор, выход которого подключен к входу дополнительного ключа, вход блока логического управления соединен через коммутатор каналов с первыми входами блоков умножения, вторые входы которых соединены с выходами блока логического управления и чере nepBHf усилитель со вторыми входами сумматоров. На чертеже приведена функциональ ная схема устройства. Устройство содержит дополнительЦ ные ключи 1, исполнительные механизмы 2, выходы которых связаны с входа1ми объекта 3 управления, измеритель 4 приращения функциона ла, входы которого связаны с выход ми объекта 3 управления, ключ 5, коммутатор 6 каналов, блок 7 логического управления, блок 8 умножения, первый усилитель 9, формирова тель 10, второй усилитель .11, блок 12 памяти и сумматор 13. Устройство работает следующим образом. На к-м цикле последовательно, начиная с первого, в каждом канале (работа всех каналов одинакова) по команде от коммутатора каналов за мыкается дополнительный ключ 1 и на выходе исполнительного механизм 2 входной сигнал х, получает приращение лх - - йх -Л ТЦЛ В результате изменения входного сигнала изменяются выходные сигнал инерционного объекта 3 и на выходе измерителя 4 приращения функционал Формируется приращение функционала к -( 6QJ Q - ОГ где Q Q(x, .. ,к- n -l/vK-- Qtrtx и и -1 Как видно, это приращение, если не учитывать различные помехи, является следствием изменения входного сигнала х на величину д. х. При замыкании ключа 5 найденное приращение функционала A. поступа на входы коммутатора 6 каналов и блока 7 логического управления. Си нал ДО с выхода коммутатора б поступает на второй вход бло .8 умножения формирователя 10 прира щения первого Канала:. На первый вход блока 8 умножения поступает сигнал знака постоянного приращени с выхода блока 7 логическогоуп;равления. Таким образом, на выходе усилителя 11, подключенного своим входом к выходу блока 8 умножения формируется переменное приращение для следующего к+1 цикла sign(aK) где О -.коэффициент усиления усилителя 11. Формула (3) справедлива при поиске минимума. Легко показать, что .).(,.,,.) С4, Значение в эапоминается в блоке 12 памяти формирователя 10 первого канала . Сигнал i.Q в блоке 7 логического управления поступает на устройство сравнения приращения функционала U.Q с заданным порогом Р. Это устройство формирует корректирующий , который через коммутатор, корректирует состояние aj триггера на выходе блока 7 логического управления. Этот триггер формирует сигнал знака постоянного приращения входного cигнaлasign (а|) . В данном случае, при включении коммутатором первого канала fl если AQ -S P -1 если AQ 7 P При поиске минимума P - некоторая отрицательная величина, смысл которой заключается в том, что если при шаге по сигналу управления функционал уменьшается на величину большую Р, то шаг в этом направлении повторяется, в следующем цикле, Если уменьшение функционала меньше Р (т.е. незначительно), то направление шага изменяется на противоположное, т.е. sign () Ff. sign (а) (б) Предусмотрена специальная синхронизация, при которой операция (6) производится после запоминания В в блоке 12 памяти. Таким образом, в последующем цикле шаг по- первой переменной формируется на выходе сумматора 13 и равен: y-Y --A sigTi J-ъ, AQ sig-HCa), (Л} где A - коэффициент усиления усилителя 9. Легко показать, что при значительной частной производной составляющие лxj имеют один знак,что Значительно ускоряет скорость движения к минимуму. В области минимума знаки составляющих приращения могут и не совпадать, но выполняется ус ловив |до5|(Р| г и, кроме того,при выполнении условия А 7 B;f-P справедливо sign ( sign (aft-f-) , (8) что исключает неустойчивость.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система экстремального управления | 1988 |
|
SU1550474A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| Система управления процессом бурения | 1973 |
|
SU554399A1 |
| Экстремальный регулятор режима обработки на металлорежущих станках | 1980 |
|
SU1015338A1 |
| Многоканальный статистический оптимизатор | 1982 |
|
SU1076872A1 |
| Система управления | 1981 |
|
SU996995A1 |
| Система автоматического управления барабанной мельницей | 1986 |
|
SU1386302A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1983 |
|
SU1089747A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока и устройство для его осуществления | 1986 |
|
SU1418626A1 |
| Устройство экстремального регулирования | 1982 |
|
SU1049865A1 |
