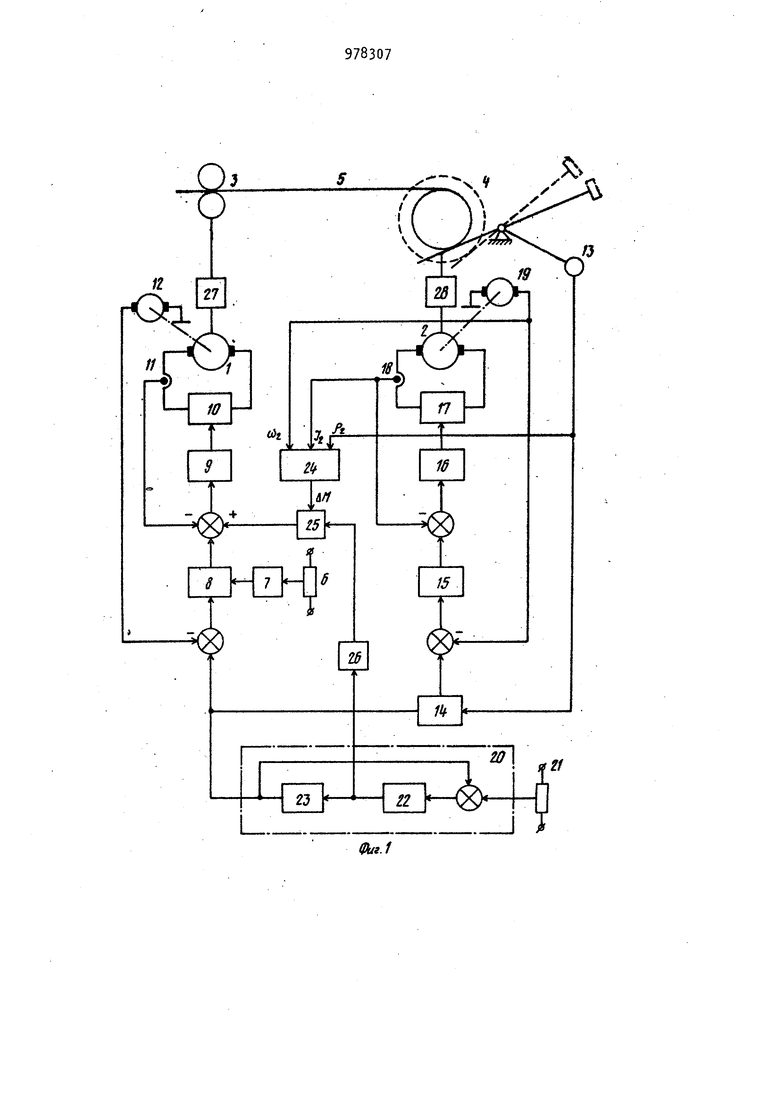
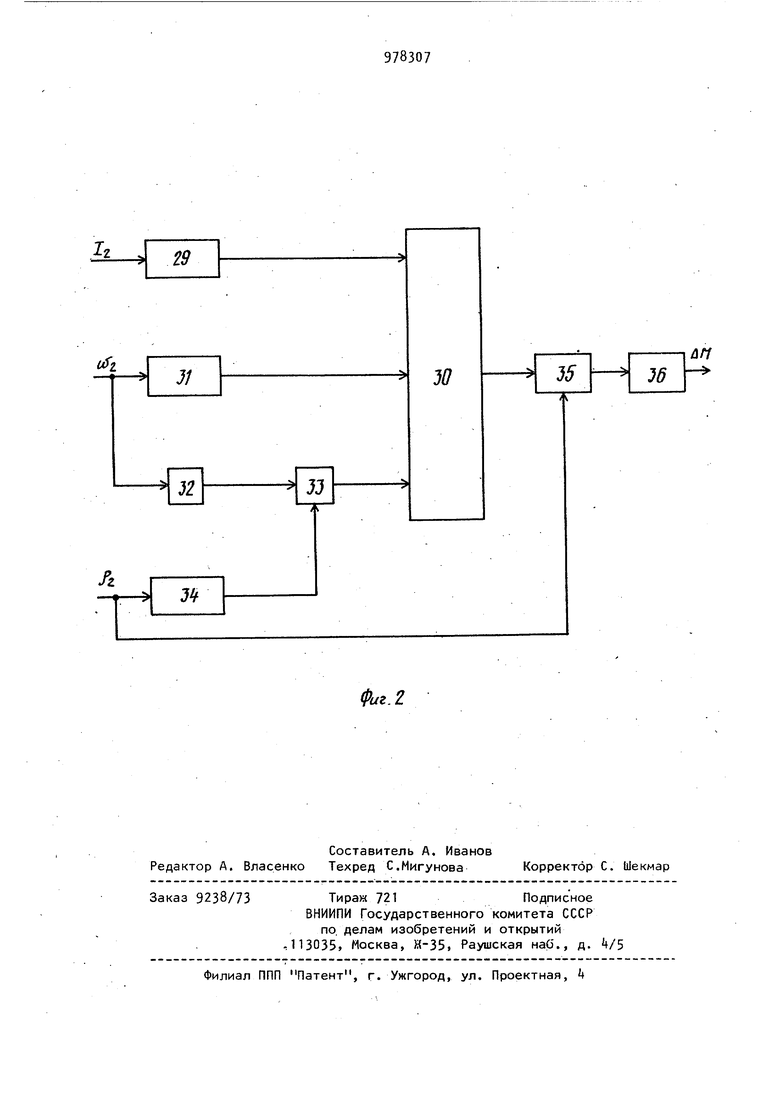
1 . Изобретение относится к электротехнике и может быть использовано в текстильной промышленности при намотке и размотке любого гибкого деформируемого материала. Известен двухдвигательный электропривод,содержащий подающее устройство компенсатор,намоточное устройство,дат чик петли,регулятор петли,управляющий преобразователь , который состоит , напри мер, из тиристорного преобразователя, регулятора тока и регулятора скорости. Натяжение между приводными точками в этом приводе стабилизируется с помощью датчиков петли Cl . Недостатком указанного двухдвига тельного электропривода является необходимость установки датчика петли или датчика натяжения, что по конструктивным соображениям невозможно Вчрйде наматывающих механизмов. Наиболее близким техническим решением к изобретению является многодвигательный электропривод, содер хащии электродвигатели подающего и наматывающего механизма, блок управления электродвигателем подающего механизма, включающий в себя датчики скорости и тока, последовательно соединенные потенциометр ограничения тока, схему отсечки, регулятор скорости, регулятор тока, тиристорный преобразователь, блок управления электродвигателем наматывающего механизма, включающий в себя датчики скорости и тока, последовательно соединенные датчик диаметра рулона, делительный блок, регулятор скорости, регулятор тока, тиристорный преобразователь, блок задания, состоящий из потенциометра задания скорости, ограничителя и интегратора, причем выход блока задания подключен к входу регулятора скорости электродвигателя подающего механизма и второму входу делительного блока 2. Недостатком известного электропривода является большая погрешность поддержания натяжения материала во время изменения его скорости. Цель изобретения - повышение стабильности натяжения материала. Поставленная цель достигается тем, что в двухдвигательный электропривод дополнительно введены корректирующий блок, ключ и выпрямитель, вход которого подключен к выходу ограничителя а выход - к управляющему входу ключа первый коммутируемый вывод ключа под ключен к входу регулятора тока элект родвигателя подающего механизма, а второй - к выходу корректирующего блока, к входам которого подключены выходы датчика диаметра рулона и дат .чиков тока и скорости электродвигателя наматывающего механизма. Корректирующий блок составлен из блока выделения приращения тока, вхо которого соединен с датчиком тока электродвигателя наматывающего механизма, а выход - с первым входом сум матора, блока выделения приращения скорости, вход которого соединен с датчиком скорости электродвигателя н матывающего механизма, а выход подключен на второй вход сумматора, бло ка выделения углового ускорения, вхо которого соединен с датчиком скорост электродвигателя наматывающего механизма, а выход - с множительным блоком, выход которого соединен с треть им входом сумматора, а другой вход множительного блока через нелинейный элемент 9вязан с .датчиком диаметра р лона; выход сумматора соединен со вт рым делительным блоком, другой вход которого подключен к выходу датчика диаметра рулона, а выход второго делительного блока соединен с входом регулятора, выход которого является выходом корректирующего блока. На фиг. 1 представлен двухдвигательный электропривод, структурная схема; на фиг. 2 - корректирующее устройство, структурная схема, Двухдвигательный электропривод по стоянного тока содержит электродвигатели 1 и 2 подающего 3 и наматываю щего Ц механизма соответственно, связь между ними обеспечивается через наматываемый материал 5, блок уп равления электродвигателями подающего механизма, включающий в себя последовательно соединенные потенциометр 6 ограничения тока, схему 7 отсечки, регулятор 8 скорости,- регуяя978тор 9 тока, тиристорный-преобразователь 10 и датчики тока 11 и скорости 12, бло1 управления электродвигателем 2 наматывающего механизма , включающий в себя последовательно соединенные датчик 13 диаметра рулона, делительный блок 14, регулятор 15 скорости, регулятор 16 тока, тиристорный преобразователь 17. В цепь якоря электродвигателя 2 включен датчик 18 тока, а датчик 13 скорости связан с ним механически. Блок 20 задания состоит из потенциометра 21 задания скорости, ограничителя 22 и интегратора 23. Выход блока 20 задания подключен к входу регулятора 8 скорости и второму входу делительного блока }k, устройство содер хит также корректирующий блок 24, ключ 25 выпрямитель 2б, вход которого подключен к выходу ограничителя 22, а выход к управляющему входу ключа 25, первый коммутируемый вывод которого подключен к регулятору 9 тока, а второйк выходу корректирующего блока 24, к входам которого подключены выходы датчика 13 диаметра рулона, датчика 18 тока и датчика 19- Электродвигатели 1 и 2 соединены с подающим 3 и наматывающим 4 механизмами через редукторы 27 и 28 соответственно, корректирующий блок 24 состоит из блока 29 выделения приращения тока, вход которого соединен с датчиком 18 тока, а выход с первым входом сумматора 30, блока 31 выделения приращения скорости, вход которого соединен с датчиком 19 скорости, а выход - со вторым входом сумматора 30; блока 3 выделения углового ускорения, вход которого соединен с датчиком 19 скорости, а выход - с множительным блоком 33, выход которого соединен, с третьим входом сумматора 30, а другой вход мно ; ительного блока 33 через нелинейный элемент 34 связан с датчиком 13 диаметра рулона, выход сумматора 30 подключен к первому входу второго делительного блока 35 второй вход которого лодключен к выходу датчика 13 диаметра рулона, а выход к входу регулятора 36, выход которого является выходом корректирующего блока 24. Корректирующий блок 24 предназначен для введения в регулятор 9 тока корректирующего сигнала с целью стабилизации натяжения материала 5 Нелинейный элемент 34 необходим для моделирования зависимости приведенного момента инерции наматывающего механизма от диаметра рулона. Двухдвигательный электропривод работает следующим образом. В установившемся режиме работы н пряжение на выходе ограничителя 22 отсутствует, поэтому ключ 25 закрыт и связи корректирующего блока 2k с регулятором тока 9 нет. Система управления электродвигателем 1 поддер живает постоянный ток якоря этого электродвигателя, задаваемый потенциометром 6. Система управления дви гателем 2 поддерживает постоянную скорость проводки материала 5, зада ваемую потенциометром 21. Рассмотрим работу электропривода во время изменения скорости проводки материала сначала без корректирующего блока 2k, ключа 25 и выпрямителя 26. Пусть скачком возросло задание н увеличение скорости, поступающее на вход блока 20 задания. Тогда на выходе ограничителя 22 появится напряжение, и намнет постепенно увели чиваться напряжение на выходе интегратора 23. Таким образом, напря жение, задающее уровень линейной ск рости материала 5, плавно увеличивается. Так как диаметр рулона изме няется медленно по сравнению со ско ростью протекания переходного проце са, делительный блок 1 можно рассматривать как блок с постоянным коэффициентом передачи, следовательн плавно увеличивающийся сигнал на выходе делительного блока 14 передается.на вход регулятора 15 скорости с i постоянным коэффициентом..На выходе регулятора 15 скорости появится избыточное напряжение, задающее приращение тока двигателя 9. В якорной цепи двигателя 2 начинает течь избыточный ток, доздающий динамический момент; наматывающий механизм k разгоняется. Одновременно увеличивается задани и на входе регулятора 8 скорости, но увеличения напряжения на его выходе нет, так как система управления настроена таким образом, что регулятор скорости насыщен и его выходное напряжение равно уставке, задаваемой потенциометром i б на схему отсечки 7 Таким образом, ток двигателя 1, а следовательно, и создаваемый им момент, не меняется. Из сказанного сле дует, что валки подающего механизма могут разогнаться до нового уровня скорости лишь за счет приращения иатях ения материала 5) находящегося в зоне проводки. Это приращение является динамической ошибкой по натяжению, которую можно вычислить по следующей формуле (лЗ,С,-лиз,р,- J где а - передаточный коэффициент регулятора 36; $2 - радиус рулона; ДЗ - приращение тока двигателя 2; СРЛ механическая постоянная двигателя 2; дш- - приращение угловой частоты вращения вала двигателя 2; Рсо жесткость механической характеристики наматывающего механизма; Jn - момент инерции наматывающего механизма, приведенный к валу двигателя 2. Рассмотрим работу электропривода с корректирующим блоком 2k ключом 25 и выпрямителем 26. Корректирующий блок 2k вычисляет динамическую ошибку по формуле, приведе 1ной выше, следующим образом. Как было сказано ранее, в .результате возрастания задания на увеличение скорости увеличится ток двигателя 2 наматывающего механизма. При изменении тока двигателя 2 на выходе блока 29 выделения приращения тока появляется сигнал, равный разности между текущим значением тока и его предыдущим установившимся значением. В простейшем случае функцию этого блока может выполнить дифференцирующая цепь с достаточно большой постоянной времени по отношению к времени переходного процесса. Эта разность тока поступает на первый вход сумматора с коэффициентом СФ2. Аналогично с блока 31 выделения приращения скорости, вход которого соединен с датчиком 19 скорости, на сумматор 30 с коэффициентом (3(- поступает сигнал о приращении угловой частоты вращения двигателя 2 наматывающего механизма k. На выходе блока 32 выделения ускорения формируется сигнал, пропорциональный угловому ускорению вала двигателя 2, Блок 32 тоже может быть решен на базе дифференцирующей цепочки с соответствующей постоянной времени. В множи тельном блоке 33 происходит умножение этого сигнала на сигнал, пропорциональный моменту инерции J2 наматывающего механизма. Величина, про порциональная J2, образуется на выходе нелинейного элемента 3. В первом приближении зависимость ) может быть задана следующим образом ПР Р Рнс(ч Jo+ К(5)-р„с,ч)при р р 2 где J начальный приведенный к валу двигателя момент ине ции наматывающего механиз ма; значение радиуса рулона, которого задается рост мо мента инерции; коэффициент пропорциональ ности между J и р, величина которого может меняться с изменением р; задается блоком нелинейности. Сигнал, пропорциональный произведению момента инерции JA на угловое ускорение duju/dt, снимается с выхода множительного блока 33 и подается на третий вход сумматора 30. Выходной сигнал сумматора 30 подключен на пер вход делительного блока 35, на второй вход которого поступает инфор мация с датчика 13 диаметра рулона. На выходе блока 35 получается сигнал пропорциональный изменению натяжения лР. Далее сигнал поступает в регулятор Зб. Регулятор 36 передает сигнал на выход с необходимым коэффи циентом усиления и форсировкой. ВыХоднЬй сигнал регулятора Зб является выходным напряжением корректирующего блока 2k. Одновременно с появлением задания на входе блока 20 задания является напряжение на выходе ограни чителя 22. Это напряжение выпрямляется выпрямителем 2б и поступает .на другой вход ключа 25. Ключ отпирается и в регулятор 9 тока поступает ко ректирующий, сигнал. Этот сигнал компенсирует динамическую ошибку по натяжению. По окончании переходного процесса напряжение на выходе ограничителя 22 уменьшается до нуля, исчезает напряжение на выходе выпрямителя 26, ключ 25 закрывается, связь с выхода корректирующего блока 2k на вход регулятора 9 тока обрывается. Привод ра97 ботает на новом уровне скорости проводки материала 5При уменьшении задания на скорость проводки материала привод работает аналогично. Использование предлагаемого устройства позволит повысить стабильность натяжения проводимого материала при изменении его скорости намотки (размотки) и, как следствие, улучшить качество продукции и снизить обрывность, ЧТО одновременно уменьшит проctoи оборудования и увеличит производительность труда. Формула изобретения . 1.Двухдвигательный электропривод постоянного тока, содержащий электродвигатели подающего и .наматывающего механизма, блок управления электродвигателем подающего механизма, включающий в себя датчики скорости и тока и последовательно соединенные потенциометр ограничения тока, схему отсечки, регулятор скорости, регулятор тока, тиристорный преобразователь и датчики тока и скорости, блок управления электродвигателем наматывающего механизма, включающий в себя датчики скорости и тока последовательно соединенные датчик диаметра рулона, делительный блок, регулятор скорости, регулятор тока, тиристорный преобразователь и датчики тока и скорости, блок задания, состоящий из потенциометра задания скорости, ограничителя и интегратора, причем выход блока задания подключен к входу регулятора скорости электродвигателя подающего механизма и второму входу делительного блока,, отличающийся тем, что, с целью улучшения стабилизации натяжения материала, в него дополнительно введены корректирующий блок, ключ и выпрямитель, вход которого подключен к выходу ограничителя, а выход - к управляющему входу ключа, первый коммутируемый вывод подключен к входу регулятора тока электродвигателя подающего механизма, а второй - к выходу корректирующего блока, к входам которого подключены выходы датчика диаметра рулона и датчиков тока и скорости электродвигателя наматывающего механизма. 2.Электропривод по п. 1, о т личающийся тем, что корректирующий блок составлен из блока выделения приращения тока, вход которого соединен с датчиком тока электродвигателя наматывающего механизма, а выход - с первым входом сумматора, блока выделения приращения скорости, вход которого соединен с датчиком скорости электродвигателя наматывающего механизма, а выход подключен на второй вход сумматора, блока выделения углового ускорения, вход которого соединен с датчиком скорости электродвигателя наматывающего механизма, а выход - с мнок{ительным блоком, выход которого соединен с третьим входом сумматора, а другой вход множительного блока через нелинейный элемент связан с датчиком диаметра рулона; выход сумматора соединен с вторым делительным блоком, другой вход которого подключен к выходу датчика диаметра рулона, а выход второго делительного блока соединен с входом регулятора, /выход которого является выходом корректирующего блока.
Источники информации, принятые во внимание -при экспертизе
1.Бучева И.Л., Иванов Г.М. Работа системы регулирования электроприводов намоточных устройств проволочных агрегатов с компенсаторами. Электротехническая промышленность. Сер. Электропривод. 1975, Н 3(38), с. .2.Иванов Г.М., Левин Г.М. и Хуторецкий В.М. Автоматизированный многодвигательный электропривод постоянного тока. М., Энергия, 1978, с. 160.дО
фиг. 2