1
Изобретение относится к электротехнике, в частности к электроприводу и может быть использовано в текстильной промышленности npvi намотке гибкого деформируемого материала.
Известен.двухдвигательный электро- привод, содержащий подающее устройство, компенсатор, намоточное устройство, датчик петли,регулятор петли, управляющий преобразователь, ко- д торый состоит,например, из тиристорного .преобразователя, регулятора тока и регулятора скорости. Натяжение между приводными точками в этом приводе стабилизируется с помощью 5 датчиков петли Ъ
Недостатком известного двухдвигательного электропривода является необходимость установки датчика петли или датчика натяжрния, что возможно 20 не в любом наматывающем механизме.
Наиболее близким к изобретению является двухдвигательный электропривод намоточной машины, содержащийэлектродвигатели подающего и наматывающего механизма с преобразователя ми в якорной цепи, датчик тока якорной цепи подающего электродвигателя связанный через регулятор с входом преобразователя наматывающего электродвигателя, задатчик скорости, подключенный к входу каждого преобразователя С J.
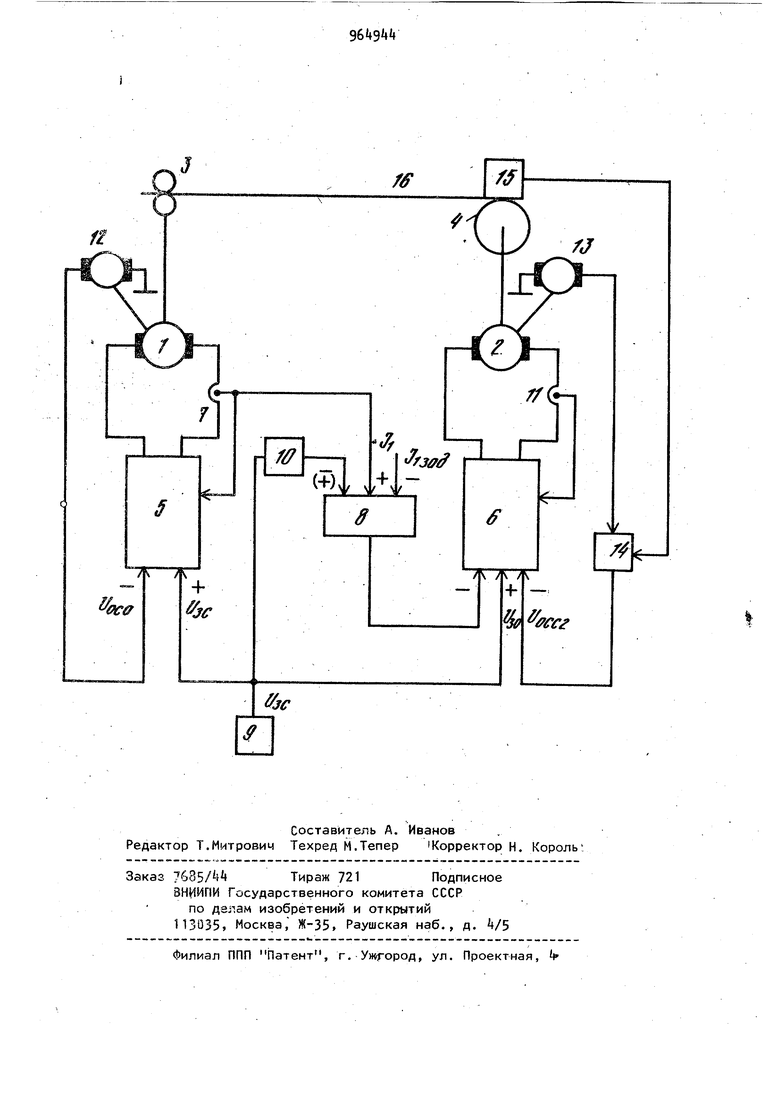
Недостатком известного устройства является то, что при переходных процессах оно не может обеспечить высокой точности стабилизации натяжения. Объясняется это тем, что с увеличением скорости наматываемого материала возрастание динамического тока подающего механизма воспринимается системой автоматического поддержания натяжения как уменьшение натяжения, а в случае уменьшения скорости нйматываемого материала уменьшение динамического тока подающего механизма воспринимается систеной автоматического поддержания натяжения как увеличение натяжения. Цель изобретения - повышение динамической точности стабилизации на тяжения наматываемого материала. Поставленная цель достига ет ся тем, что в известный электропривод дополнительно введено дифференцирующее звено,вход которого подключен к задатчику скорости, а выход - к второму входу регулятора. На чертеже представлена ст|зуктурная схема электропривода. Электропривод сожержит электродвигатели 1 и 2 подающего и наматывающего механизмов 3 и ,преобразователи 5 и 6/датчик 7 тока якорной .цепи электродвигателя 1 подающего механизма 3) связанный с входом преобразователя 6 через регулятор 8, за датчик 9 скорости, подключённый квходу каждого преобразователя, дифференцирующее звено 10, вход которо го подключен к задатчику 9 скорости а вьГход - к второму входу регулятора 8. Кроме того, электропривод содержит датчик 11 тока якорной цепи элект{зодвигателя 2, тахогенераторы 12и 13 каждого электродвигателя. Тахогенератор 12 связан выходом с преобразователем 5 а Тахогенератор 13подключен к первому входу блока Т перемножения, второй вход которого подключен к выходу датчика 15 диаметра наматываемого рулона с наматываемым материалом 16. Дв1ухдвигательный электропривод намоточной машины работает следующим образом. С помощью обратной связи по току с датчика тока 7 на преобразователь 5 подающего механизма 3 компенсируется постоянная времени якорной цепи двигателя 1 подающего механизма Обратная связь по скорости с тах генератора 12 на преобразователь 5 необходима для поддержания постоянства скорости, заданной задатчиком 9 скорости. Связь с датчика 11 тока на преобразователь б компенсирует постоян ную времени якорной цепи двигателя 2 наматывающего механизма Л. Сигнал с тахогенератора 13, пропорциональный частоте вращения двиг теля 2, умноженный на сигнал с дат чика 15 радиуса, пропорциональный радиусу наматываемого рулона, позволяет получить сигнал на выходе блока Т перемножения, пропорциональ ный окружной, скорости рулона. Использование данного сигнала в качестве обратной связи позволяет получить окружную скорость рулона постоянной и равной скорости, заданной с задатчиком 9 скорости независимо от эллипсовидности рулона и изменения момент- та нагрузки на валу двигателя 2. В установившемся режиме по мере наматывания ткани 16 увеличивается радиус рулона, т.е. увеличивается сигнал обратной связи с блока 1 перемножения, о так как сигнал задания по скорости с задатчика 9 скорости остается постоянным, то уменьшается частота вращения двигателя 2 и окружная скорость рулона остается постоянной. Следовательно, в установившемся режиме окружные скорости подающего механизма 3 и наматывающего механизма постоянны, значит и натяжение материала 16 в зоне между данными механизмами постоянно. При увеличении натяжения материала 16 (увеличивается усадка материала в рассматриваемой зоне)уменьшается ток двигателя 1, что приводит к уменьшению уровня сигнала с датчика тока 7, поэтому разность между 1,дИ 1 увеличивается, регулятор 8 вызывает уменьшение окружной скорости наматывающего механизма t, что приводит к восстановлению прежнего уровня натяжения, заданного уровнем сигнала 1. В качестве регулятора 8 можно использовать регулятор с заданным законом регулирования. При работе электропривода во время переходных процессов, например во время увеличения скорости наматываемого материала, сигнал Uq, поступающий с задатчика 9 скорости на преобразователь 6, увеличивается в результате чего на его входе возникает разность между оссч Последняя вызывает увеличение тока якорной цепи двигателя 2, а следо.вательно, и его частоты вращения. За счет увеличения сигнала с тахогенератора 13 пропорционального частоте вращения двигателя 2, умноженного на сигнал с датчика 15 диаметра рулона, пропорционального радиусу наматывающего рулона, происходит увеличение сигнала на выходе блока Н перемножения, что приводит к увеличению DOCCI и постепенно по разгона двигателя 2 разность между с Uoc.j MC4e3aeT, т.е. двигатель ; переходит работать в установившийся ре жим на более высоком уровне скорости, Одновременно с двигателем 2 разгоняется и двигатель 1, jr.e. и - поступает на вход преобразователя 5 на ё ходе которого возникает разность между ( и Uocc. вызывающая увели-, чение тока в якорной цепи двигателя 1. В результате угловая скорость дви гателя 1 увеличивается. Это увеличе-) ние скорости .происходит до тех пор, пока UOCCH ® достигает значения , т.е. устанавливается равенство сигна лов. Таким образом, при увеличении ско рости наматываемого материала от задающего сигнала увеличивается ток в цепи якоря двигателя 1 и на входе регулятора 8 возникает разност между Ц и Ц,, что приводит к умен / шению сигнала на выходе регулятора 8 по абсолютной величине. На измене ние этого сигнала система реагирует как на изменение (уменьшение натяжения наматываемого материале ,16. Это изменение вызвано самой системой косвенного поддержания натяжения, так как ее работа построена таким 06 разом, что при увеличении или уменьшении натяжения из-за технологических возмущений, т. е. усадки или вытяжки ма териала,в зоне изменяется и величина тока двигателя 1 .Для того,чтобы скомпенсировать изменение величины тока двигателя 1 при изменении задающего воздействия. с задатчика 9 скорости введено дифференцирующее звено 10, на вход которого поступает сигнал с задатчика скорост а выход соединен с регулятором 8. Пр увеличении сигнала с задатчика 9 ско рости на вход дифференцируЬщего звена 10, он дифференцируется в последнем и на вход регулятора 8 подается с отрицательным знаком (на чертеже знак указан без скобок. При уменьшении сигнал в звене 10 дифферен цируется и на вход регулятора 8 подается с положительным знаком (на чертеже знак указан в скобках). Как было указано выше, при увеличении скорости наматываемого материала 16 увеличивается ток в цепи якоря двигателя 1 . Изменение данного тока приводит к увеличению сигнала 1 на входе регулятора 8, и с дифференцирующего звена 10 на другой вход регулятора 8 поступает сигнал противоположной полярности и компенсирует возрастание сигнала. В результате компенсации 1 сигнал регулятора 9 остается постоянным при изменении сигнала задания скорости и и поэтому при изменении скорости заматываемого материала 16 от задат чика 9 скорости натяжение в зоне Me«iду подающим и наматывающим механизмом остается постоянным. Использование данного устройств позволяет при обработке гибкого, дефос мируемого материала снизить дополнительные перенатяжения последне- го в переходных режимах и, как сл§д ствие, уменьшить качество продукции при уменьшении брака и ликвидировать обрывы, что одновременно уменьшает простой оборудования и увеличивает производительность труда. Формула изобретения Двухдвигательный электропривод намоточной машины, содержащий электродвигатели подающего и наматывающего механизмов с.преобразователями в якорной цепи, датчик тока якорной цепи подающего электродвигателя связанный через регулятор с входом преобразователя наматывающего электродвигателя, задатчик скорости j подключенный к входу каждого преобразователя , О тли чающий с я тем, что, с цвлыо повышения динамической точности стабилизации натяжения наматываемого материала ,в него дополнительно введено дифференцирующее звено, вход которого подключен к задатчику скорости, а выход - к второму входу регулятора. Источники информации, принятые во внимание при экспертизе 1.Бучева И. Л Иванов Г. М. Работа системы регулирования электроприводов намоточных устройств проволочных агрегатов с компенсаторами Электротехническая промышленность Сер. Электропривод 1957, № 3(38), с. U-17. 2.Авторское свидеггельство СССР № , кл. Н 02 Р 5Л6ч 1980.

| название | год | авторы | номер документа |
|---|---|---|---|
| Двухдвигательный электропривод постоянного тока | 1981 |
|
SU978307A1 |
| Двухдвигательный электропривод постоянного тока | 1975 |
|
SU731541A1 |
| Устройство для регулирования натяжения полосового материал | 1976 |
|
SU568471A1 |
| Многодвигательный электропривод постоянного тока для поточной линии с перематывающим механизмом | 1983 |
|
SU1160520A1 |
| Устройство для автоматического управления натяжением при намотке рулонного материала | 1989 |
|
SU1687550A1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГОТОКА | 1971 |
|
SU320898A1 |
| Электропривод перемоточных машин | 1986 |
|
SU1378005A1 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU373825A1 |
| Автоматическая система управления намоткой бумажного полотна | 1989 |
|
SU1657561A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД СУПЕРКАЛАНДРА | 1997 |
|
RU2131641C1 |