Изобретение относится к электротехнике и может быть использовано в красильно-отделочном произ водстве текстильной промьштенности, в частности в поточных линиях для обработ ки гибкого деформируемого материала. Известен двухдвигательный электропривод перематывгиощего механизма в системе поточной линии, построенный на базе электрического дифференциала. В электроприводе в качестве регулятора тока двигателя раската не пользуется шунтирукяций резистор, а для согласования скоростей двигателей дифференциальной cxevej, привопящих в движение перематывакяций механизм с остальными двигателями поточной линии, используется регулятор разности ЭДС двигателей flTj. Недостатками указанного устройства являются: низкая точность поддержания натяжения в момент пуска и останова линии, ввиду того, что современные перематывающие механизмы имеют тенденцию к увеличению диаметра рулона наматывгисадего материала, увеличению его веса, поэтому увеличивается ток двигателей и регулятор разности ЭДС дает неточную информацию, ограничение пределов регулирования натяжения на малых скоростях ввиду малой эффективности шунтирующего резистора в этом режиме, значительные потери энергии в шунтирующем резисторе при увеличении натяжения материала. Наиболее близким техническим решением является многодвигательный электропривод для перемещения гибкого деформируемого материгша, содержащий электродвигатели постоянного тока, объединенные в дифференциальную ячейку, связанные с датчиками скорости, датчики натяжения, регуляторы скорости, регулятор тока и общий источник постоянного напряжения дифференциальной ячейки, источник управления базовой скоростью, один из датчиков натяжения механически соединен с регулятором скорости двигателей дифференциальной ячейки, выход которого подключен к первому входу сумматора, второй вход сумматора соединен с задатчиком скорости двигателей дифференциальной ячейки }. Недостатком этого устройства является то, что оно не позволяет с требуемой точностью согласовывать ско рости перематываиощего устройства и маишн линии во всех режимах работыs
Намот, Выборка, Рабочий режим, так как в нем отсутствуют связи,компенсирующие изменения скорости двигателей при изменении радиусов рулонов перематываемого материала, что снижает коэффициент полезного времени (КПВ) оборудования и снижает качество обрабатываемого, материала.
Цель изобретения - повышение точности согласования скоростей, механизмов в линии..
Поставленная цель достигается тем, что в известное устройство- введены блоки перемножения, датчики диаметров перематывающего механизма, механически соединенные соответственно с.первыми входами блока перемножения, ко вторым входам которых подключены соответственно датчики скорости- двигателей дифференциальной ячейки выходы блоков перемножения подключены . к третьему входу сумматора t выход ко торого подключен к общему источнику постоянного напряжения дифференциальной ячейки.
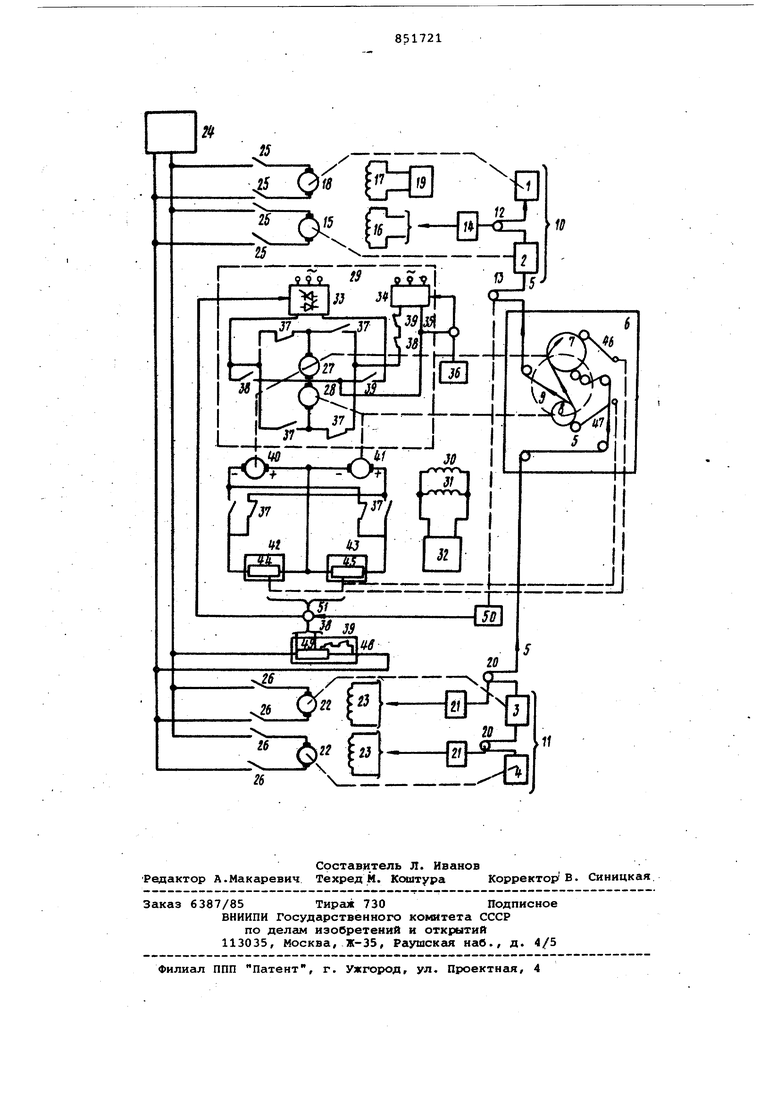
На чертеже представлена функциональная технологическая схема предлагаемого электропривода.
Поточная линия состоит из машин 1, 2, 3 и 4, обрабатывающих ткань 5 расправленным полотном. Перематывающий механизм 6 состоит-из двух роликов 7 и 8, на которые периодически наматывают и сматывают ткань 5 в два слоя. Оси роликов крепятся в поворотном барабане 9. Машины 1 и 2 образуют часть поточной линии 10, с помощью которой выбирают ткань из перематывающего механизма 6. Машины 3 и 4 образуют часть поточной линии 11, с помощью которой загружают перематывающий механизм 6, Натяжение ткани.5 мехщу машинами части линии 10 измеряют датчиками 12 и 13 натяжения.Дат,чик 12 натяжения механически связан через регулятор- 14 скорости с двигателем 15 внедифференциальной ячейки через Обмотку 16 возбуждения. Обмотка 17 возбуждения двигателя 18 получает питание от источника 19 постоянного напряжения. Датчики 20 натяжения части линии 11 механически соединены через регуляторы 21 скорости с двигателями 22 внедифференциальной ячейки, г-через обмотки- 23 возбуждения. Управление двигателями 15, 18 и 22 производят от источника 24 уп.равления базовой скоростью. Двигатели 15, 18 и 22 получают питание от источника 24 через коммутирующие устройсува 25 и 26.
Якоря двигателей 27 и 28 дифференциальной ячейки 29 кинематически соединены с роликами 7 и 8 соответственно перематывающего устройства 6. Обмотки 30 и 31 возбуждения двигателей 27 и 28 получёиот питание от источника 32 постоянного напряжения. Двигатели 27 и 28 получают питание от об:щего источника 33 постоянного напряжения дифференциальной ячейки, выполненного реверсивным. Реверсивный источник необходим для согласованного торможения больших маховых.масс перематывающих роликов 7 и 8 с машинами 1, 2, 3 и 4 линии. Регулирование наряжения ткани внутри перематывающего механизма 6 между роликами 7 и 8 производят регулятором 34 тока, с управляющим входом которого соединены датчик 35 тока и задатчик 36 тока. Для изменения направления враще-. ния переключение двигателей 27 и 28 после переворота барабана 9, когда ролики 7 и 8 поменяются местами,производят коммутирующим устройством 37. Переключение двигателей 27 и 28 в режим Выборка и Заправка производится коммутирующими устройствами. 38 и 39 соответственно. С двигателями 27 и 28 механически соединены датчики 40 и 41 скорости, электрически соединенные через коммутирукяцее устройство 37 соответственно со входами блоков 42 и 43 перемножения, выполненных в виде переменных резисторов 44 и 45. Для уменьшения числа контактов аппарата 37 в слаботочных цепях обратной связи у датчиков 40 и 41 скорости и блоков 42 и 43 перемножения выделена средняя точка. Подвижные контакты резисторов 44 и 45 механически соединены с датчиками диаметров рулонов перематывающего устройства 6, выполненных в виде ощупывающих роликов 45 и 47 соответственно. Выход блоков 42 и 43 перемножения, которыми являются подвижные контакты переменных резисторов 44 и 45,электрически соединены с источником 33.
Источник 24 напряжения электрически соединен с источником 33 через задатчик 48 скорости двигателей дифференциальной ячейки,выполненный в виде потенциометра 49. Часть сопротивления потенциометра 49 шунтируется контактами коммутирующего устройства 38 и 39.Per гулятор 50 скорости служит для преобразования перемещения датчика 13 натяжения в электрический сигнал,корректирующий напряжение источника 33 двигателей дифференциальной ячейки в зависимости, от положения датчика 13 натяжения. Электрические сигналы с регулятора 50 скорости, задатчика скорости двигателей дифференциальной ячейки и блоков перемножения суммируются на сумматоре 51, выход которо.го подключен-к источнику 33.
Устройство работает следукщим образом.
В режиме Заправка отключают часть линии 10 -коммутирующими устройствсоли 25.. Одновременно отключают двигатель 28 разматывающего ролика 8 за1«11канием коммутирующего устройства 39. Источником 24 задают необходи мую скорость части линии 11. Двигатель 27 накатного ролика 7 является эадагацим для части линии 11. Напряж ние на выходе блока 42 перемножения поддерживается постоянным при посто янной скорости движения ткани незав симо от диаметра рулона наматываемо материала на накатной ролик 7. Действительно напряжение на выход блока перемножения равно: с d где и - напряжение-на выходе блока перемножения, и. - напряжение датчика 40 скорости, пропорциональное час тоте вращения двигателя 27 ролика 7; Uj - напряжение, пропорционально диаметру рулона наматываемо го материала ролика 7,определяемое величиной пе;реме1дения движка резистора 44. Известно, что число оборотов дви гателя накатного устройства равно: и- У ЬО-ч.2 -,-. (О где п - число оборотов двигателя 27 V - линейная скорость движения материала, d - диё1метр рулона наьматываемого материала на ролик 7. Поскольку UJ - К d, Uc - к n, то из (1) и (2; получим U в Кт К d , и «У, т.е.ВЫходное напряжение блока 42 перемножения пропорционально линейной скорости ткани. Поскольку двигатель 27 работает в замкнутой системе регулирования выходной величины блока 42, то линей ная скорость ткани поддерживается по стоянной на уровне, заданном задаисщи напряжением источника 24. По окончании намотки ткани на ролик 7, ролики 7 и 8 разворачиваются с помощью поворотного барабана 9, включается двигатель 28, размыкая коммутирующее устройство 39 и далее включается перематывгиощий механизм в рабочий режим, при этом ткань наматывается в два слоя на ролик 8. Двигатель .28 работает в режиме Нака та, двигатель 27 - Раската. Натяжение ткани между роликами задают ве личиной тока через задатчик 36 и регулятор 34 тока. Выходное напряжение блоков 42 и 43 перемножения поддерживается пропорциональным линейной скорости ткан ролика 8, аналогично блоку 42 в режи ме Заправка. Выходное напряжение блоков 42 и 43 суммируется и подается на вход регулируемого источника 33. Суммарная окружная скорость руло нов ткани 7 и 8 поддерживается постоянной на уровне, определяемом зада ющим напряжением источника 24 и задатчика 48 скорости двигателей. Поскольку суммарный сигнал блоков 42 и 43 перемножения в этом режиме увеличивается вдвое, то увеличивается и выходйой сигнал блока 48 вдвое,путем замыкания контактов 38 и 39 потенциометра 49. В рабочем режиме работают все двигатели и все машины линии, коммутирующие устройства 25 и 26 замкнуты, 38 и 39 разомкнуты, а состояние коммутирующего устройства 37 зависит от того, на какой ролик 7 или 8 наматывается ткань, если ткань наматывается на ролик 7 (как показано на чертеже) , )то коммутирующее устройство 37 разомкнуто. . Задающим двигателем в линии в рабочем режиме является двигатель 18, скорость которого.устанавливается от источника 24. Согласование скоростей остальных двигателей в линии происхо дит за счет обратных связей по датчикам 12, 13 и 20 натяжения. Линейная скорость перематывающего механизма устанавливается задающим напряжением, снимаемым с потенциометра 49 и корректируется датчиком 13 натяжения через регулятор 50 скорости. Регуляторы 14, 21 и 50 скорости преобразуют выходной сигнал датчиков скорости компенсатора в электрический сигнал-напряжение, пропорциональный величине натяжения. Обратная связь по линейной скорости перематывающего механизма снимается с выходов -блоков 42 и 43 перемножения. В рабочем режиме работают |оба двигателя 27 и 28, оба датчика 40 и 41 скорости и оба датчика 46 и 47 диаметра. Ткань наматывается на ролик 7 и сматывается с ролика 8,скорость двигателя 27 уменьшается, а диаметр ролика 7 увеличивается, у двигателя 28 скорость увеличивается, а диаметр ролика 8 уменьшается. Сигнал, снимаемый с блоков 42 и 43 перемножения, остается постоянным и сумма их также постоянна, поэтому линейная скорость перематывакяцего механизма постоянна и устанавливается напряжением с источника 24 как и у других двигателей линии. Натяжение в зоне между перематывакяцими роликами 7 и 8 устанавливаетя задатчиком 36 тока, в процессе раоты может меняться или поддерживатья постоянным в зависимости от прораммы, заданной задатчику 36 тока. В-режиме Выборка, т.е. когда нао выбрать материал из перематываюего механизма, который остался на олике 8, линия работает аналогично, ак в режиме Заправка. Часть линии 11 отключается аппараом 26, двигатель 27 шунтируется комутирующим устройством 38, который акже отключает регулятор 34 тока и уменьшает вдвое задающий сигнал т.е будет работать один двигатель 28 в перематывающем механизме 6. Задающим двигателем в линии остается двигатель 18, а остальные двигатели подстраиваются под него датчи кгмя 12 и 13. Сигнал с датчика 40 ско рости равен нулю, поэтому и сигнет с блока 42 перемножения равен нулю,а сумма сигналов с блоков 42 и 43 равна сигналу блока 43 поэтому линейная скорость ролика 8, как ив других режимах определяется уровнем напряжения источника 24 питания. Предлагаемое изобретение по сравнению с известным позволяет повысить точност согласования скоростей машин.в линии что дает возможность поднять точност поддержания натяжения материала, про водимого По линии и тем сакоам улучшить качество ткани, повысить надежность работы линии и тем самлм поднять коэффициент полезного времени .(КПВ) оборудования. Формула изобретения Многодвигательный электропривод постоянного тока для поточной линии с перематывающим механизмом, содержа щий электродвигатели постоянного тока, объединенные в дифференциашьную ячейку, связанные с датчиками скорое ти, датчики натяжения, регуляторы скорости, регулятор тока и общий источник постоянного напряжения дифференциальной ячейки, источник управления базовой скоростью, один из датчиков натяжения механически соединен с регулятором скорости двигателей дифференциальной ячейки, выход которого подключен к первому входу сумматора , второй вход « сумматора соединен с задатчиком скорости двигателей дифференциальной ячейки, отличающийся тем, что с целью повышения точности согласования, скоростей механизмов в линии,в него дополнительно введены блоки перемножения,датчики диаметров перематываняцего механизма,механически соединенные соответственно с первыми входами блока перемножения, ко вторым входам которых подключены соответственно датчики скорости двигателей дифференциальной ячейки,выхода) блоков перемножения подключены к третьему входу сумматора, выход которого подключен к осйцему источнику постоянного напряжения дифференциальной ячейки. Источники информации, принятые во вишлание при экспертизе 1.Пастин С.В. Князев Ю.Б.Электрический дифференциал в поточных линиях .- электричество/ Д972, №12. 2.Авторское свидетельство СССР по заявке 2492143/24-07, КЯ. Н 02 Р 7/68, 1977.

| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод постоянного тока для поточной линии с перематывающим механизмом | 1983 |
|
SU1160520A1 |
| Устройство для регулирования скорости лентопротяжного механизма | 1988 |
|
SU1501002A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Многодвигательный электропривод постоянного тока поточной линии | 1986 |
|
SU1415402A1 |
| Устройство для управления перемоткой длинномерного материала | 1987 |
|
SU1461738A1 |
| Устройство для регулирования скорости лентопротяжного механизма | 1985 |
|
SU1298726A1 |
| Устройство для автоматического регулирования натяжения при намотке рулонного материала | 1988 |
|
SU1595774A1 |
| Способ рихтовки каната и устройство для его осуществления | 1985 |
|
SU1349826A1 |
| Электропривод с регулированием натяжения обрабатываемого упругого материала | 1986 |
|
SU1387155A2 |
| Устройство управления изгибно-растяжным агрегатом | 1981 |
|
SU984530A1 |