1
Изобретение относится к устройствам, предназначенным для испытания ручных машин вращательного действия на вибрацию и обеспечивает имитацию динамических характеристик человека-оператора, т.е. входного механического импеданса руки в трех направлениях ортогональной системы координат н в направлении вращения вокруг геометрической оси нспытьшаемой ручной машины.
Известно устройство для имитации входного д механического импеданса руки человека, представляющее собой электромагнитный демпфер, со стаканом, внутри которого имеется регулировочная пружина и цилиндр с определенной имитационной массой 1}.
фнное устройство обеспечивает имитацию входного механического импеданса только в одном направлении ортогональной системы коорданат и поэтому может быть ишользовано в стендах для испытания ручных машин с 20 вибрацией только в осевом направлении, например, клепальных молотков.
Наиболее близким к изобретению по технической сущности является имитатор входного механического импеданса руки человека оператора, преимущественно ручных машин вращательного действия, содержащие корпус, установленный в нем н подпружиненный по оси стакан, ложемент для крепления испьггуемой машины, реактивную пружину, связанную с ложементом, и упругодемпфнрующий элемент, связывающий стакан с ложементом. Реактивная пружина в имитаторе выполнена пластинчатой 2.
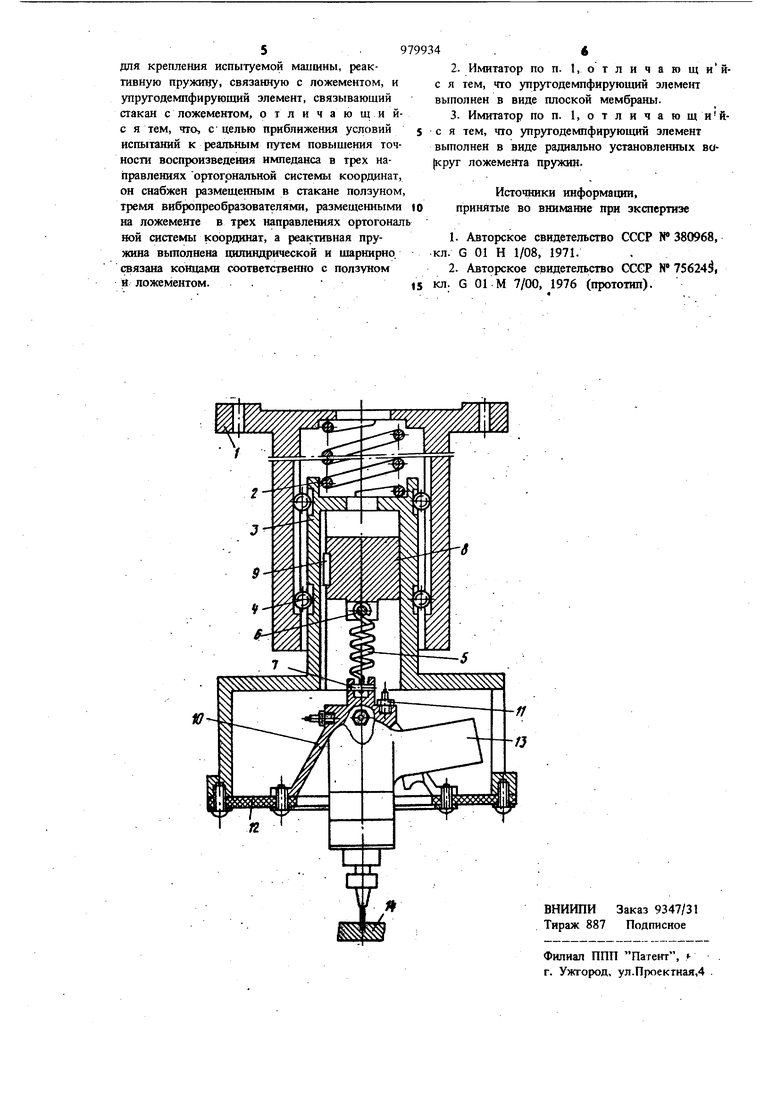
Данный имитатор обеспечивает воспроизведение выходного механического импеданса руки при крзгпшьных колебаниях машины и в осевом направлении, т.е. позволяет измерять вибрацию только в одном направлении ортогональной системь координат и не пригоден для определения объективной оценки вибрационно-силовых параметров без непосредственного участия человека в двух других направлениях ортогональной системы координат, например, у сверлильных ручных машин, имеющих, помимо крутильных колебаний, еще и колебания в трех направлениях ортогональной системы координат. Целью изобретения является приближение условий испытаний к реальным условиям работы .путем повышения точности воспроизведения входаого механического импеданса руки в трех направлениях ортогональнрй системы координат. Указанная цель-, достигается тем, что имитатор входного механического импеданса руки человека-оператора, преимущественно ручных машин вращательного действия, содержащий корпус, установленный в нем и подпружиненнь1Й по оси -стакан, ложемент для крепления испытуемой мащины, реактивную пружину, связанную с ложементом, и упругодемпфнр ющий элемент, связывающий стакан с.ложементом, снабжен раз ещенным в стакане пол/ зуном тремя вибропреобразователями, размещенными на ложементе в трех направлениях ортогональной системы координат, а реактивн пружина выполнена цилиндрической и щарнир но связана концами соответственно с ползуном и ложементом. Кроме того, упругодемпфирующий элемент вьшолнен в виде плоской мембраны. Или радиально установленных вокруг ложемента пружнн. На чертеже изображен предлагаемый имитатор входного механического импеданса руки человека-оператора, продольный разрез. Имитатор входного механического импеданса руки содержит корпур 1, внутри которого -расположена регулировочная пружина 2 для Обеспечения рабочего -усилия нажатия испытываемой ручной мащнны, упирающаяся в дно стакана 3, имеющего возможность перемещени вдоль оси на подшипниках 4, размещенных в гнездах корпуса 1 и стакана 3. Внутри стакана 3 установлена цилиндрическая реактивная 5 с определенной жесткостью для восприятия крутильных колебаний от испытьшаемой мапшны. Пружина 5 через оси 6 и 7, установленные во взаимно перпендикулярных плоскостях, шарнирно свя. зана с одной стороны с ползуном 8, снаб. женным шпонкой 9, исключающей его поворот относительно стакана 3 и имеющим возможность перемещаться вдоль оси стакана 3, а с другой стороны - с жестким ложементом 10, имеющим определенную имнтационную ма су. На ложементе 10 по трем направлениям ортогональной системы координат жестко уст новлены вибропреобразователи 11. При этом ложемент 10 через упругодемпфируюидай эле, мент 12, вьшолненный в виде плоской мембр ны или радиально расположенных вокруг ложемента 10 пружин, обеспечивающий воспроизведение импеданса руки оператора в трех )шправлениях ортогональной системы координат, связан со стаканом 3. Имитатор работает следующим образом. Во время испытания ручной маишны ГЗ вращательного действия на вибрадаю, последнюю устанавливают в ложемент 10 и прижимают к пакету, и с необходимым усилием через пружину 2. При этом происходит натяжение унругодемпфирующего элемента 2, а реактивная пружина 5 свободно перемещается вдоль оси внутри стакана 3, перемещая связанный с ней через щарнир 6 ползун 8. При включении испьгтываемой ручной мащины 13 в работу в ней - возбуждаю.тся продольные, поперечные, крутильные колебания, воспринимаемые соответствующими деталями имитатора, что и приводит к- возникновению частотнозависимых сил, препятствующих перемещению корпуса ручной мащины, т.е. обеспечивается имитация динамических характеристик руки человека-оператора. Таким образом, реактивная пружина 5 воспринимает крутящий момент мащины, а упругодемпфирующий элемент 12 - перемещения машины в трех направлениях ортогональной системы координат. Вибропреобразователи 11, жестко закрепленные на жестком ложементе Ю с установленной в ложементе 10 испытываемой ручной мащины 13, воспринимают колебания корпуса машины . и передают соответствующий сигнал на регистрирующую аппаратуру (не показана). . Предлагаемая конструкция имитатора позволяет приблизить условия испытания ручных машин вращательного действия на вибращ1ю к реальным условиям и обеспечивает имитацию динамических характеристик оператора в трех направлениях ортогональной системы координат и реактивного момента от вращеьшя рабочего органа испытываемого инструмента. Кроме того, предлагаемый имитатор обеспечивает улучшение условий труда, повышение производительности, освобождение оператора от непосредственного контакта с вибрирующим инструментом при измерении вибрационных параметров, а также измерение вибрационных параметров у ручных машин без разрушения и каких-либо их доработок. Ожидаемый экономический эффект от использования изобретения только на одном предприятии по предварительным подсчетам составляет 60,3 тыс. рублей. Формула изобретения 1. Имитатор входного механического импеданса руки человека-оператора, преимуществен но ручных машин вращательного действия, содержащий корпус, установленный в нем и подпружиненный по оси стакан, ложемент для крепления испытуемой маишны, реактивную пружичу, связанную с ложементом, и упругодемпфирующий элемент, связывающий стакан с ложементом, о т л и чаю щи йс я тем, гго, с целью приближения условий испытаний к реальным путем повышения точности воспроизведения импеданса в трех направлениях ортогональной системы координат, он снабжен размещенным в стакане ползуном, тремя вибропреобразователями, размещенными на ложементе в трех направлениях ортогонал ной системы координат, а реактивная пружина вьшолнена цшгандрической и шарнирно. связана концами соответственно с ползуном и ложементом.. 9 4.« 2.Имитатор по п. 1, о т л и ч а ю щ и йс я тем, что упругодемпфирующий элемент выполнен в виде плоской мембраны. 3.Имитатор по п. 1, о т л и ч а ю щ ийс я тем, что упругодемпфирующий элемент выполнен в виде радиально установленных ва(круг ложемента пружин. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 380968, кл. G 01 Н 1/08, 1971. 2.Авторское свидетельство СССР N 75624, кл. G 01 М 7/00, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Имитатор входного механического импеданса руки человека | 1978 |
|
SU700786A2 |
| Стенд для испытаний ручных механизированных инструментов вращательного действия | 1981 |
|
SU1024256A1 |
| Имитатор входного механического импеданса руки человека | 1978 |
|
SU862015A2 |
| Стенд для испытания пневматических ручных молотков и поддержек на вибробезопасность | 1976 |
|
SU868417A1 |
| Имитатор импеданса руки человека | 1986 |
|
SU1328707A1 |
| Зажимное устройство к стенду для испытаний ручных машин | 1988 |
|
SU1576842A1 |
| ИМИТАТОР ВХОДНОГО МЕХАНИЧЕСКОГО ИМПЕДАНСА РУКИ ЧЕЛОВЕКА | 1973 |
|
SU380968A1 |
| Имитатор входного механического импеданса руки человека для испытаний механизированного инструмента | 1975 |
|
SU530215A1 |
| Имитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов | 1984 |
|
SU1315848A1 |
| Стенд для испытания мотопил | 1983 |
|
SU1107029A1 |
