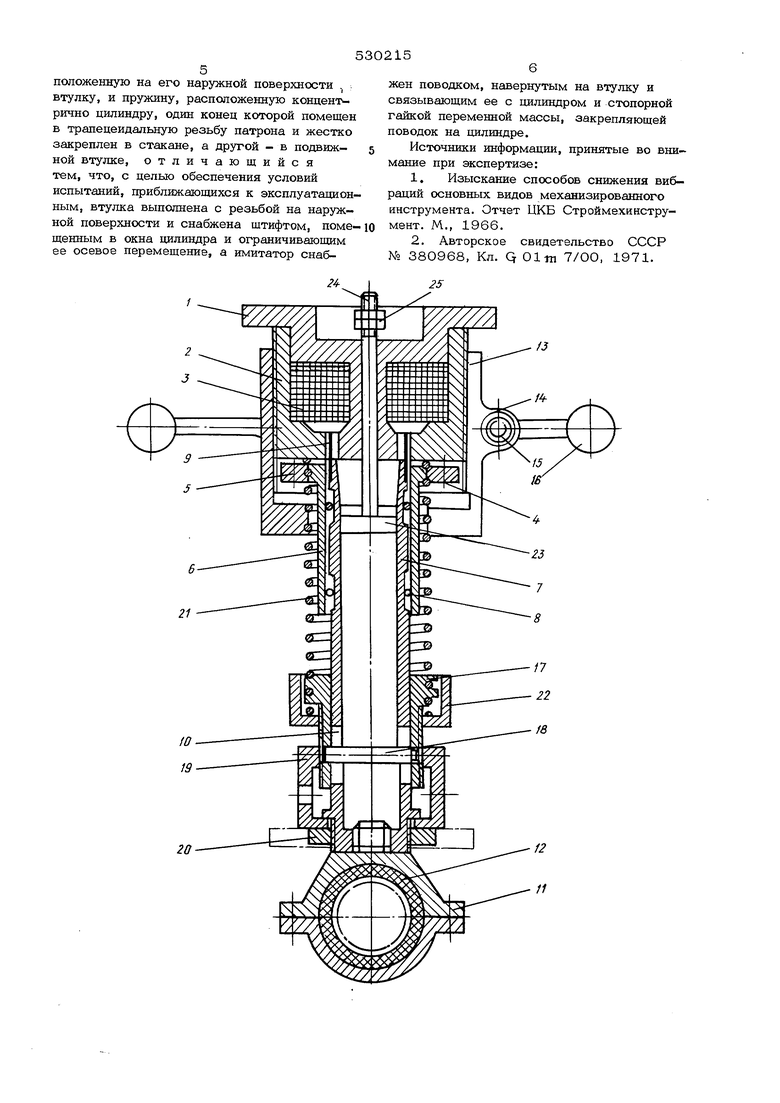
(54) ИМИТАТОР ВХОДНОГО МЕХАНИЧЕСКОГО ИМПЕДАНСА РУКИ 1ЕЛОВЕКА ДЛЯ ИСПЫТАНИЙ МЕХАНИЗИРОВАННОГО ИНСТРУМЕНТА с цилиндром и стопорной гайкой переменной массы, закрепляющей поводок на цилиндре. На чертеже изображен описываемый ими татор, продольный разрез. Имитатор содержит: электромагнитный демпфер, состоящий из сердечника 1, магнитопровода 2 и катущки 3; к магнитопроводу 2 при помощи винтов 4, гайки 5 жестко крепится стакан 6. Имитационная масса выполнена в виде цилиндра 7, связан ного со стаканом 6 через шаровые опоры 8, взаимодействующего с демпфером через замкнутое кольцо 9 и имеющего на нижнем конце диаметрально расположенные окна 10. К нижнему концу цилиндра 7 прикреплен захват 11 для рукоятки инструмента с упру гим элементом 12, Разрезной патрон 13, охватывающий магнитопровод 2 и демпфер, имеет трапецеидальную резьбу по всей внуг ренней поверхности. Стопорится патрон 13 механизмом, состо5пцим из эксцентрика 14, оси 15 и рукоятки 16. На наружной поверх ности цилиндра 7 находится подвижная втул ка 17 со штифтом 18, помещенным в окно 1О цилиндра и ограничивающим ее осевое перемещение. На резьбе наружной поверхнос ти втулки 17 навернут поводок 19, связывающий .втулку 17с цилиндром 7-. Стопорная гайка 2 О закрепляет поводок 19 на цилиндре 7. Концентрично цилиндру 7 установлена пружина 21, один конец которой помещен в трапецеидальную резьбу патрона 13 и жест ко крепится в стакане 6, а другой - в под- вижной втулке 17 гайкой 22. На цилиндре 7 крепится ограничитель его осевого перемещения, состоящий из плоской гайки 23, тяги 24 и гайки 25. Цилиндр 7 с укрепленными на нем деталями имитирует приведенную массу руки человека, изменяемую в пределах 0,2:1,5 кг за счет переменной массы стопорной гайки 20. Упругий элемент 12 с нелинейной динамической жесткостью и потерями / имитирует входную жесткость и вход ные потери руки. Пружина 21 с регулируемой жесткостью порядка 10-6 О имитирует жесткость локтевых и плечевых суставов. Электромагнитный демпфер с к оэффициентом демпфирования порядка 50 - 250 имитирует часть вязкого трения руки. При снятии вибрационно-силовых характеристик в исследуемом направлении имитатор сердечником 1 демпфера крепится к станине стенда (на чертеже не показан) и через упругий элемент 12 захватом 11 соединяет ся с рукояткой рамы механизированного инструмента, например, мотопилы (на чертеже не показана). Для исследования на режимах рабочего хода исследуемый инструмент, например, мотопилу устанавливают в прорезь ствола дерева. Ослабляют стопорную гайку 20 и, поворачивая поводок 19, перемещают в осевом направлении втулку 17 с жестко закрепленными витками пружины 21, регулируют необходимое усилие надвигания инструмента (1О-20 кг) и закрепляют гайку 20. Поворотом эксцентрика 14 относительно оси 15 рукояткой 16 ослабляют затяжку патрона 13. Поворачивая патрон 13, изменяют число рабочих витков пружины 21 и, следовательно, ее жесткость в необходимых пределах. Затягивают патрон 13, поворачивая эксцентрик в обратном направлении. Для исследования инструмента на режимах холостого хода пильный аппарат мотопилы выводится из прорези ствола дерева. Поскольку концы пружины 21 жестко прикреплены к сердечнику 1 и втулке 17, инструмент удерживается в подвещенном состоянии за счет растяжения пружины 21, усилие которой обусловлено весом инструмента. В случае поломки пружины 21, тяга 24 с гайками 23 и 25 служит ограничителем осевого перемещения цилиндра 7. Навинчиванием сменных стопорных гаек 2 О различной массы регулируют приведенную массу рук оператора, участвующую в колебани$1х. Возможность регулировки коэффициентов жесткости, демпфирования и приведенной массы в широких диапазонах позволяет использовать имитатор и для всех промежуточных режимов работы мотопилы, а также использовать его и для другого механизированного инструмента. Формула изобретения Имйтатор входного механического импеданса руки человека для испытаний механирированного инструмента, содержащий электромагнитный демпфер, жестко закрепленный на нем стакан, имитационную массу, выполненную в виде связанного со стаканом, взаимодействующего с демпфером и имеющего на своем нижнем конце диаметрально расположенные окна цилиндра, закрепленный на нижнем конце цилиндра захват для рукоятки инструмента с упругим элементом, охватывающий демпфер разрезной патрон с трапецеидальной резьбой на внутренней поверхности, подвижную вдоль оси цилиндра и рас-
| название | год | авторы | номер документа |
|---|---|---|---|
| Имитатор импеданса руки человека | 1986 |
|
SU1328707A1 |
| Нажимное устройство к стенду для испытания механизированных инструментов | 1982 |
|
SU1065710A2 |
| Имитатор входного механического импеданса руки человека | 1978 |
|
SU700786A2 |
| ИМИТАТОР ВХОДНОГО МЕХАНИЧЕСКОГО ИМПЕДАНСА РУКИ ЧЕЛОВЕКА | 1973 |
|
SU380968A1 |
| Имитатор динамических свойств руки оператора к стенду для испытания механизированных инструментов | 1984 |
|
SU1315848A1 |
| Имитатор входного механического импеданса руки человека | 1978 |
|
SU862015A2 |
| Нажимное устройство к стендудля иСпыТАНия МЕХАНизиРОВАННыХиНСТРуМЕНТОВ | 1976 |
|
SU845029A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ РАЗОВЫХ ЛИТЕЙНЫХ ФОРМ БЕЗ МОДЕЛИ ОТЛИВКИ И СТАНОК ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ РАБОЧЕЙ ПОВЕРХНОСТИ ПОЛУФОРМЫ | 2011 |
|
RU2510729C2 |
| Имитатор импеданса руки человека | 1989 |
|
SU1633301A1 |
| Нажимное устройство к стенду для испытания механизированных инструментов | 1977 |
|
SU648864A1 |
