(54) ПРИВОД РАПИРЫ ЛЕНТОТКАЦКОГО СТАНКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод рапиры лентоткацкого станка | 1987 |
|
SU1440974A1 |
| УСТРОЙСТВО ДЛЯ ПРОКЛАДЫВАНИЯ УТОЧНОЙ НИТИ НА ЛЕНТОТКАЦКОМ СТАНКЕ | 2010 |
|
RU2419694C1 |
| Устройство привода рапиры к ткацкому станку | 1988 |
|
SU1509442A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2172240C1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ МАШИНА С МЫШЕЧНЫМ ПРИВОДОМ | 2014 |
|
RU2635201C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179505C1 |
| Устройство для прокладывания уточной нити на лентоткацком станке | 1987 |
|
SU1432107A1 |
| АВТОМАТ ДЛЯ КРЕСТОВОЙ НАМОТКИ ШВЕЙНЬГХ НИТОК НА ЦИЛИНДРИЧЕСКИЕ ГИЛЬЗЫ | 1969 |
|
SU234904A1 |
| Ткацкий рапирный станок | 1975 |
|
SU646923A3 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1999 |
|
RU2180946C2 |
Изобретение относится к текстильному -машиностроению и предназначено для использования на лентоткацких станках. Известен привод рапиры, лентоткацкого станка, содержащий механическую передачу. Этот привод имеет кривошинно-щатунный механизм, соединенный с коленчатым рычагом, сообщает качательное движение прокладывающий уток рапире через конические зубчатые колеса f11 . Однако он имеет единственный закон перемещения рапиры, обусловленный кривошипно-щатунным механизмом, и, в св зи с жесткими элементами передач его работа сопровождается высокими ударным и инерционными нагрузками. Наиболее близким к предлагаемому я& ляется привод рапиры лентоткацкого стан ка, содержащий пространственную кулачковую пару, кулчок которой соединен с главным валом станка и механическую передачу, на ведущем звене которой уотановлен выполненный в виде ролвка толкатель кулачковой пары, а на ведомом жестко закреплена 2 . Механическая передача выполнена в виде зубчатого сектора и сцепленной с ним шестерни, на оси которой укреплена рапира.. Закон п емешення рапнры обусловлен профилем кулачка. Недостатком этого привода является наличие в механизме ударных я д яюлнительных инерционных нагрузок, вызванных наличием жесткой системы передачи и ее значительных масс. Цель изобретения - увеличение долговечности и надежности работы привода рапиры. Поставленная цель достигается тем, что в приводе рапнры лентоткацкого станка, содержащем просгранственную кулачковую пару, кулачок которой соединен с главным валам станка и механическую передачу, на ведущем звене которой уохановлен выполненный в виде ролика толкатель кулачковой пары, а на ведомом жестко згифбплена рапира, механическая
передача вьшолнена ременной, ее шкивы установлены с возможностью возвратноПОС1 ртательного движения, а ремень жестко закреплен на каждом на них.
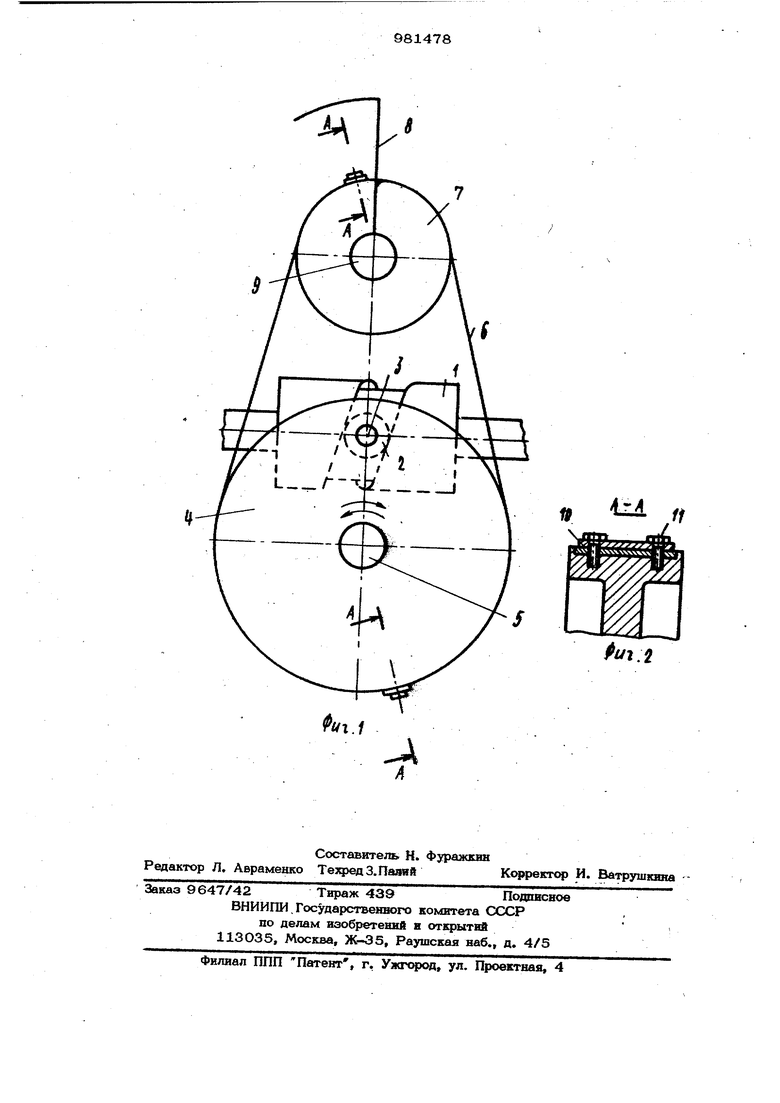
На фиг. 1 изображен привод рапиры лентоткацкого станка; на фиг. 2 - раэрез А-А на фиг. 1.
Привод рапиры имеет кулачковую пару, состоящую иэ кулачка 1, получающего вращательное движение от главного вала станка {не показан), и ролика 2, имек шего возможность вращаться на оси 3, закрепленной в шкиве 4. Шкив 4 установлен с возможностью поворота на оси 5, установленной неподвижно. Посредством гибкого элемента 6 шкив 4 связан со шкивом 7, жестко соединенным с рапирой 8. Шкив 7 coBhjecTHO с рапирой 8 может также совершать возвратно-поступательное движение относительно оси 9. Гибкий элемент 6 жестко закреплен на шкивах 4 и 7| например, посредством накладки Ю и болтов 11.
Привод рапиры работает следующим образом,
При вращении кулачка 1 получает движение ролик. 2, который в свою очередь приводит, в возвратно-поступательное движение шквв 4. Шкив 4 приводит через гибкий элемент б без проскальзывания в возвратно-врашательное движение шкив 7, а с ним и рапиру 8.
Наличие в кинематической цепи гибкого элемента с жестким креплением его на шкивах позволяет снизить динамические нагрузки в привод рапиры лентоткацкого
X станка.
Формула изобретения
Привод рапиры лентоткацкого станка, содержащий пространственную кулачковую пару, кулачок которой соединен с главным валом станка, и механическую пер& дачу, на ведущем звене которой установлен выполненный в виде ролика толкатель кулачковой пары, а на ведомом жестко закреплена рапира, о т л и ч а ю щ и и с я тем, что, с целью повышения долговечности и надежности работы, механическая передача выполнена ременной, ее шкивы установлены с возможностью возвратно-поступательного движения, а ремень жестко закреплен ча каждом из них.
Источники информации, принятые во внимание при экспертизе
М.2
