рую установлен до упора хвостовик головки с возможностью вертикального перемещения, причем на одной из стенок смонтированы круговой циферблат и подпружиненная поворотная рукоятка, установленная с возможностью фиксации в ртверстиях циферблата , а вал вращения рукоятки выполнен коленчатым, и над им, вокруг центра, размещенного на пересечении горизонтали с условной фронтальной плоскостью, проходящей через геометрическую ось вращения вала, на противоположной стенке расположены верхний и нижний участки вер йкальной беговой дорожки, вьтолненной по эллипсу, построенному на горизонтальной геометрической оси, равной длине большей оси эллипса основной беговой дорожки надставки по точкам, определяющим крайние места возможного положения глаз по высоте, при этом на участках вертикальной беговой дорожки смонтировано по дополнительному ролику, смещенному на то же расстояние по горизонтали и в ту же сторону от центра дорожки, что и основные указанные ролики надставки от центров соответствующих беговых дорожек а оси, на которых надеты ролики вертикальной беговой дорожки, установлены на стержне с возможностью перемещения по участкам дорожки, который пропущен через коромысло, выполненное L -образной формы с перекладиной у задней дорожки надставки , при этом стенки штатива снажены шкалами высот, равными длине малой оси эллипса и охвачены J. -образной стрелкой, установленной на указанной головке, под хвостовиком которой шарНирно закреплен шатун, через конец которого и колено ук занного вала вращения рукоятки пропущен подпружиненный палец, снабженный подвижно закрепленным стаканом и неподвижной пятой для фиксации шатзжа и указанного вала, а на Ъси дополнительных роликов, смонтированных на верхнем и нижнем участках указанной беговой дорожки стенки, надеты вершинами рамки, имеющие форму равнобедренных треугольников, высота которых равна расстоянию от центра эллипса до геометрической оси вращения коленчатого вала, ниже которой на стенке штатива нанесена шкала диапазоне подъема головки, длина которой соответствует половине малой оси указанного эллипса, при этом обе рамки электроизолированы от стенки, выполнены из токопроводящего материала, подсоединены к одной из клемм источника питания и расположены с возможностью контактирования с контактом электролампы, цоколь которой подсоединен к второй клемме источника питания, кроме того, на основании штатива вертикально закреплены стойки и горизонтально расположены стрелки ростоуказателя, указанные стенки штатива снабжены шкалами ростоуказателя и установлены на вертикальные регулировочные элементы, а затылочная часть основания головки снабжена выемкой для ее закрепления в зоне фиксации головы оператора.
2.Устройство п. 1, отличающееся тем,- что трассирзпощий элемент выполнен в виде ленты
со вставками, на которых имеются мерные линейные деления, связанной со втягивающей пр5жиной.
3.Устройство по п. 1, о т л И-/ чающееся тем, что, с целью обеспечения сигнализации момента взгляда оператора на точку наблюдения и измерения соответствующих параметров , упомянутая указка состоит из стержня, вставленного в рукоятку
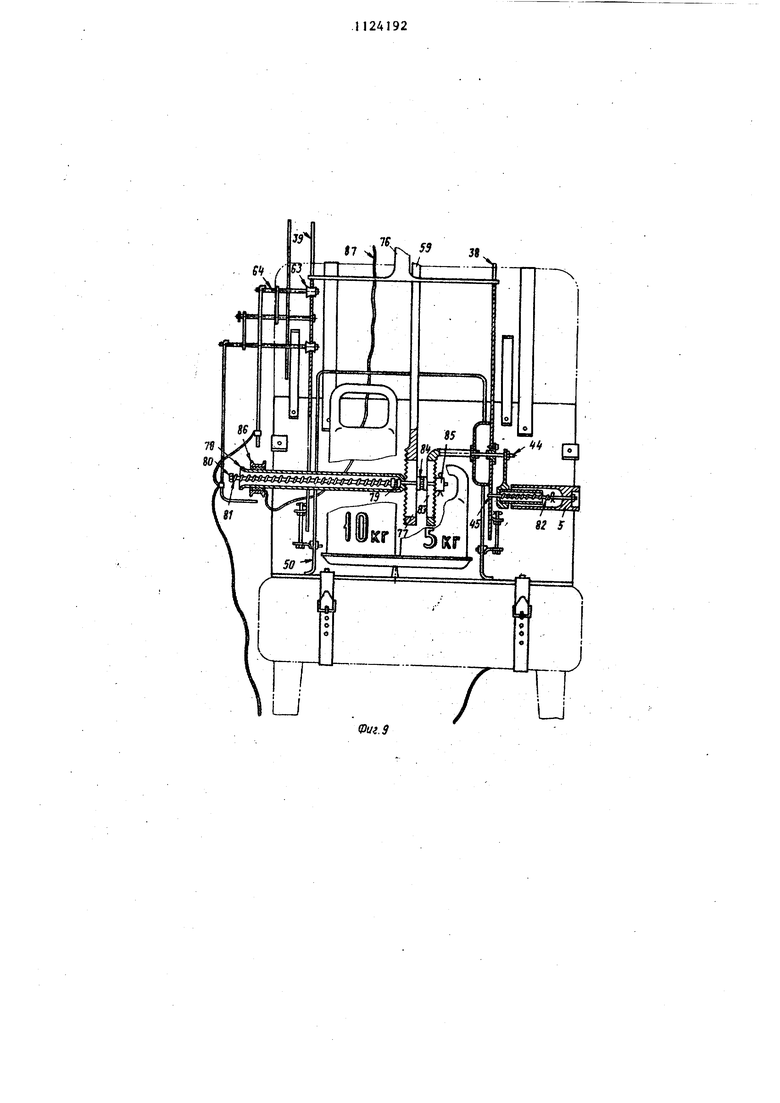
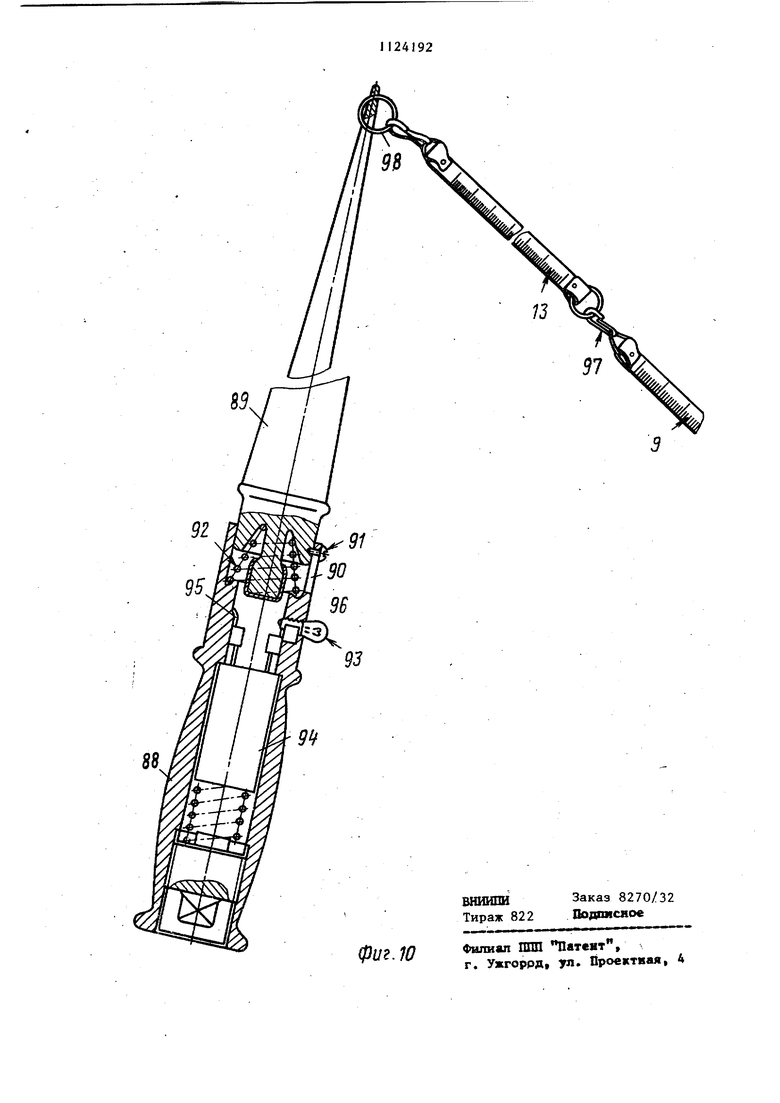
с продольным пазом, и снабжена электролампой с возможностью замыкания ее контакта на клемму злектробатарейки, которая вмонтирована в рукоятку, с токопроводящим элементом подпружиненного стержня при контакте указки с точкой наблюдения. 1 Изобретение относится к измерительным приборам для измерения сшнейчых расстояний от глаз до объекта наблюдения, а также угловых пространственных параметров поля геометрической видимости, определения обзорности с рабочего места операто ра транспортного средства (самоходных комбайнов , тракторов, автомобилей) или стационарной установки (кабины управления прокатными станами, автоматическими линиями, конвейерами, рольгангами и т.д.) с учетом его антропометрических данных и может быть использовано для оценки параметров обзорности кабин транспортных средств и стационарных установок, а также выявления выступающих точек обстановки рабочего места, ухудшающих обзорность. Известен способ оценки обзорности транспортного средства, отражающий упрощенное построение панорамы обзора транспортного средства на стадии его проектирования jjj . Недостатком данного способа оцен ки обзорности транспортного средства является неточность построения и как следствие, оценки панорамь обзора транспортного средства, так , как для этого используется не само транспортное средство в натуральную величину, а ортогональные чертежи, как правило, уменьшенного масштаба испытуемого объекта, точность, испол нения и использования которых, требуя очень высокой квалификации исполнителей, не дает полной имитации линий взгляда, а вместе с ней затрудняет возможность отыскания удобных точек обзорности. Известно устройство для определе ния параметров обзорности кабины транспортного средства, позволяющее определять на горизонтальной площадке , где расположен испытуемый объект, границу видимой и невидимой зон обзорности и.выявить выступающие точки, ухудшающие обзорность 2 Однако для определения обзорности через площадь всех окон кабины, отдельно через секторы окон, очищаемые стеклоочистителями, контуры которых простилаются не только ниже , но и выше уровня горизонта, известное устройство использовать нел зя, так как его основной орган трассирующий элемент пропущен через 2I нижнюю часть стойки, устанавливаемой на площадке, где размещается транспортное средство, Tve. всегда он направлен ниже уровня горизонта, поэтому такое устройство не может определять параметры обзорности точек наблюдения, находяпщеся выше или хотя бы на линии горизонта. Кроме того, чтобы определить расстояние от глаз до точек наблюдения, например до панелей пультов управления , необходимые для проверки на соответствие эргономическим требованиям, проводят дополнительные измерения или расчеты. Наиболее близким к изобретению по технической сущности является устройство для измерения параметров обзорности рабочего места oneратора транспортного средства или стационарной установки, содержащее воспроизводящий крайние положения глаз оператора элемент, выполненный в виде головки с горизонтально расположенной замкнутой о.сновной беговой дорожкой эллиптической формы, выполненной по точкам, определяющим крайние места положения глаз оператора в плоскости горизонта, и смонтированный на штативе, установленном на сиденье, а также размещенное в беговой дорожке приспособление для трассирования с трассирующим элементом, располагающееся на уровне главного луча зрения оператора, выполненное с возможностью его поворота вокруг геометричес ких вертикальной и горизонтальной перпендикулярной трассирукицему элементу осей и снабженное шкалой измерения углов в вертикальной плоскости з. . Недостатки указанного устройст ва - необходимость многократных переналадок в процессе испытания, например в виде перестановки основания из прорезей и его закрепление по вертикали в предельных точках эллипса, что увеличивает трудоемкость работ i ограниченность пределов измерения, так как расширение диапазона действия телескопического штока до бесконечности невозможно из-за необходимости увеличить диаметр штока, приводящее к громоздкости системы его поддержания, а ы случае замены телескопического штока оптическим прибором - рапное
отсутствие наглядности имитации лучей зрения из-за невидимости трасс лучей зренияf
не предусмотрена возможность получе ния линейных расстояний до точек наблюдения;
не предусмотрена возможность получения исходньгх данных к отысканию позы оператора в момент 1аилучшего обозрения интересукицей точки наблюдения;
не предусмотрена возможность ограничения зон видимости только поворотом глаз, либо от поворота головы, или необходимостью разворота головы и глаз одновременно; не предусмотрена возможность точной установки приспособления.для трассирования на уровень главного луча зрения,
не предусмотрена возможность автоматического контроля над циклом измерений, что требует Привлечения эргономистов высокой квалификации.
Целью изобретения является повышение удобства пользования и расширение пределов измерения путем автоматического слежения за диапазоном подъема главного луча зрения оператора и автоматического получения значений линейных параметров одновременно с угловыми без переналадок в процессе измерения, а так же при помощи:
имитации линии взгляда на достаточно большое расстояние; быстрого отыскания наиболее удобных точек обзорности и получения исходных данных к отысканию позы оператора в момент наилучшего обозрения точки наблюдения с рабочего места оператора;
обеспечения высокой -степени точности подъема приспособления для трассирования на номинальный уровень главного луча зрения как при свободном положении головы оператора, так и в ее фиксированном состоянии автоматического установления диапазона максимального отклонения по высоте главного луча зрения в зависимости от местонахождения точки наблюдения сбоку, спереди или сзади;
облегчения работ по определению параметров обзорности за счет сигнализации момента взгляда оператора на точку наблюдения и измерения
124192 I Л соответствующих параметров из точки обзорности удобной для обозрения .
Указанная цель достигается тем,
5 что в устройство для измерения параметров обзорности рабочего места оператора транспортного средства или стационарной установки, содержащее воспроизводящий крайние по10 ложения глаз оператора элемент, выполненный в виде головки с горизонтально расположенной замкнутой основной беговой дорожкой эллиптической формы, выполненной по точкам,
15 определяющим крайние места положения глаз оператора в плоскости горизонта, и смонтированный на штативе , установленном на сиденье, а также размещенное в беговой дорожке
20 приспособление для трассирования с трассирующим элементом, располагающееся на уровне главного луча зрения
.оператора, выполненное с возможностью его поворота вокруг геометричес 5 ких вертикальной и горизонтальной перпендикулярной трассирующему элементу осей и снабженное шкалой измерения углов в вертикальной плоскости, введена система сигнализа30 ции о крайних положениях подъема
головки, которая снабжена охватывающей ее надставкой, имеющей соответствующие основной дополнительную нижнюю, а также верхние переднюю и
35 заднкяо эллиптические беговые дорож- . ки, при этом в верхние дорожки вмонтированы основные ролики с возможностью перемещения конгруэнтно в одном направлении, оси их соединены
40 коромыслом, снабженным угловой шкалой отсчета бинокулярного поля зрения оператора вокруг оси ролика, вмонтированного в переднюю дорожку, а приспособление для трассирования
45 вьтолнено в виде шара, в полости
которого закреплен указанный трассирующий элемент, соединенный с указкой, и снабжено обоймой, которая прикреплена к указанной шкале из50 мерения углов в вертикальной плоскости и надета на ось ролика передней дорожки, причем указанное приспособление установлено с возможностью его перемещения по нижней дорожке
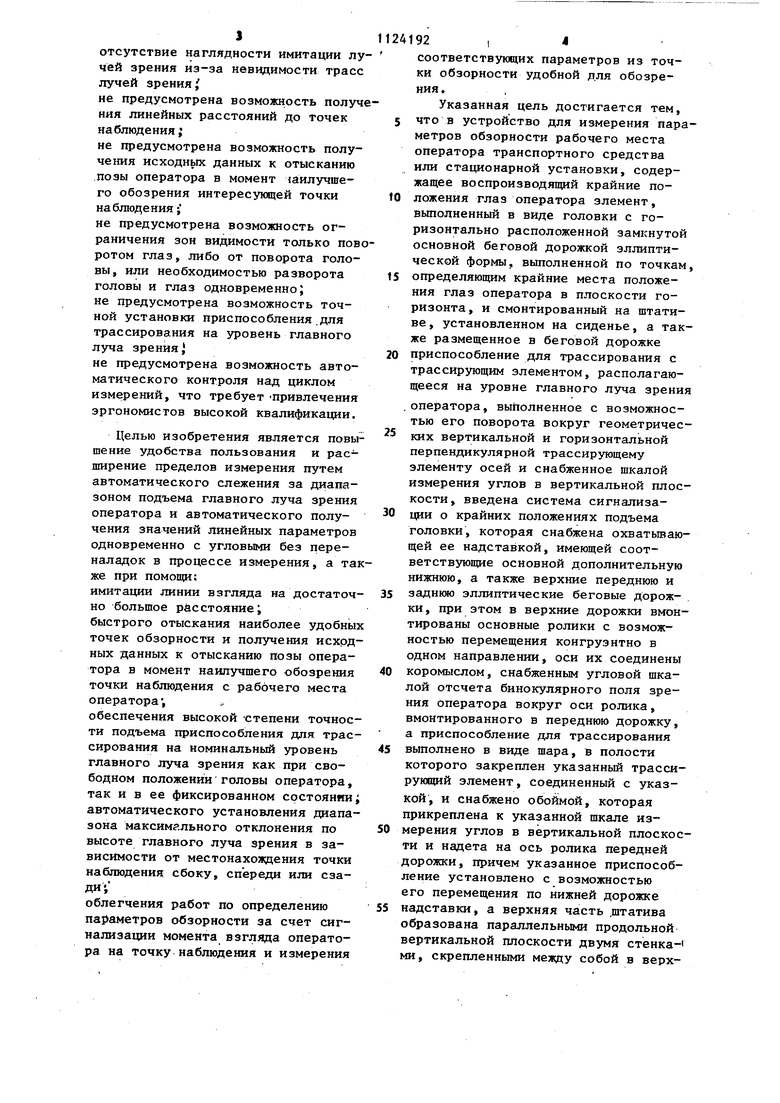
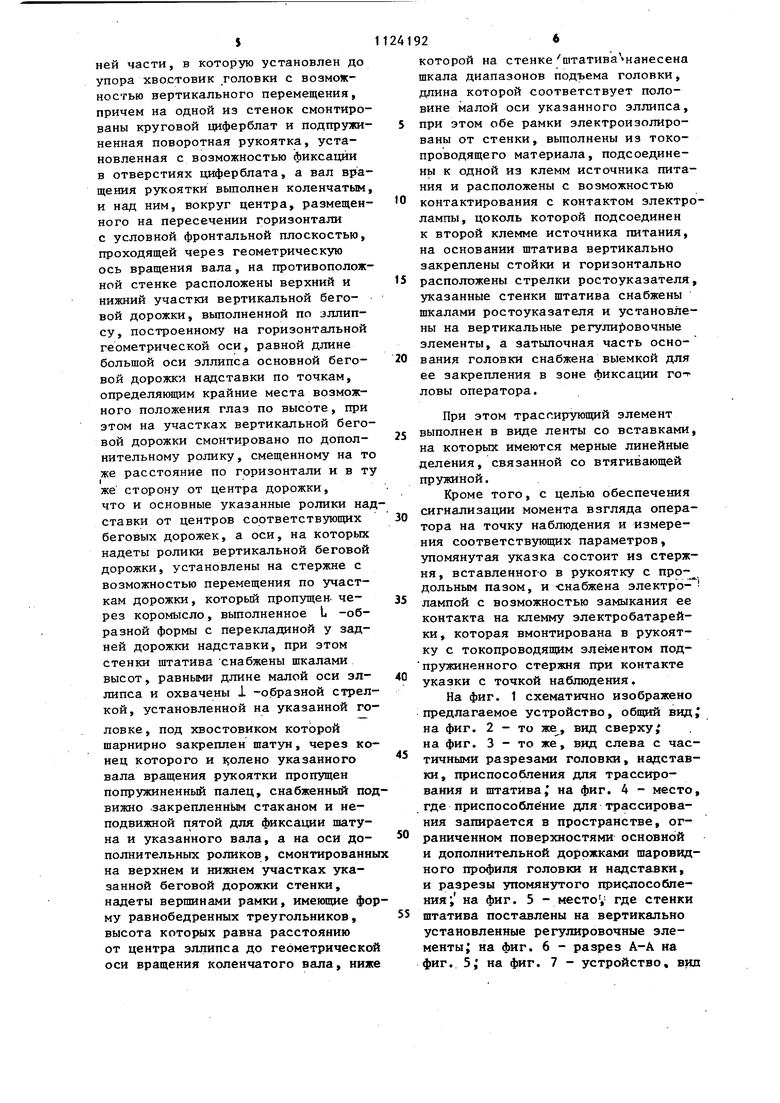
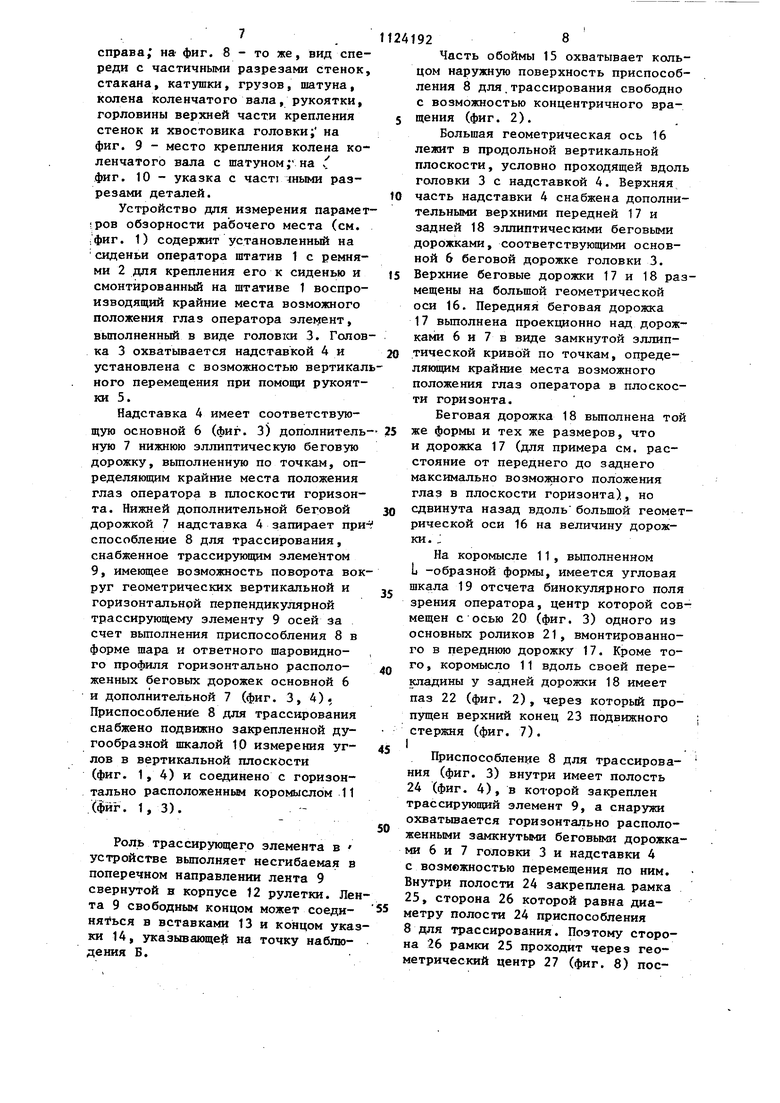
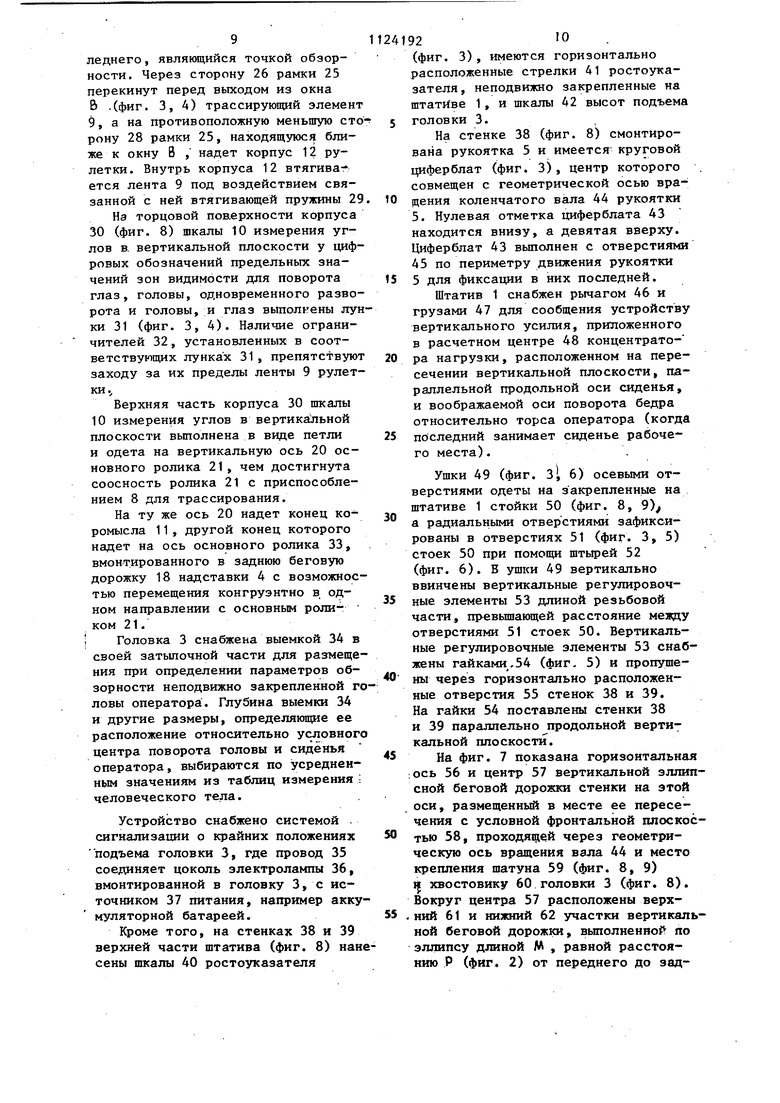
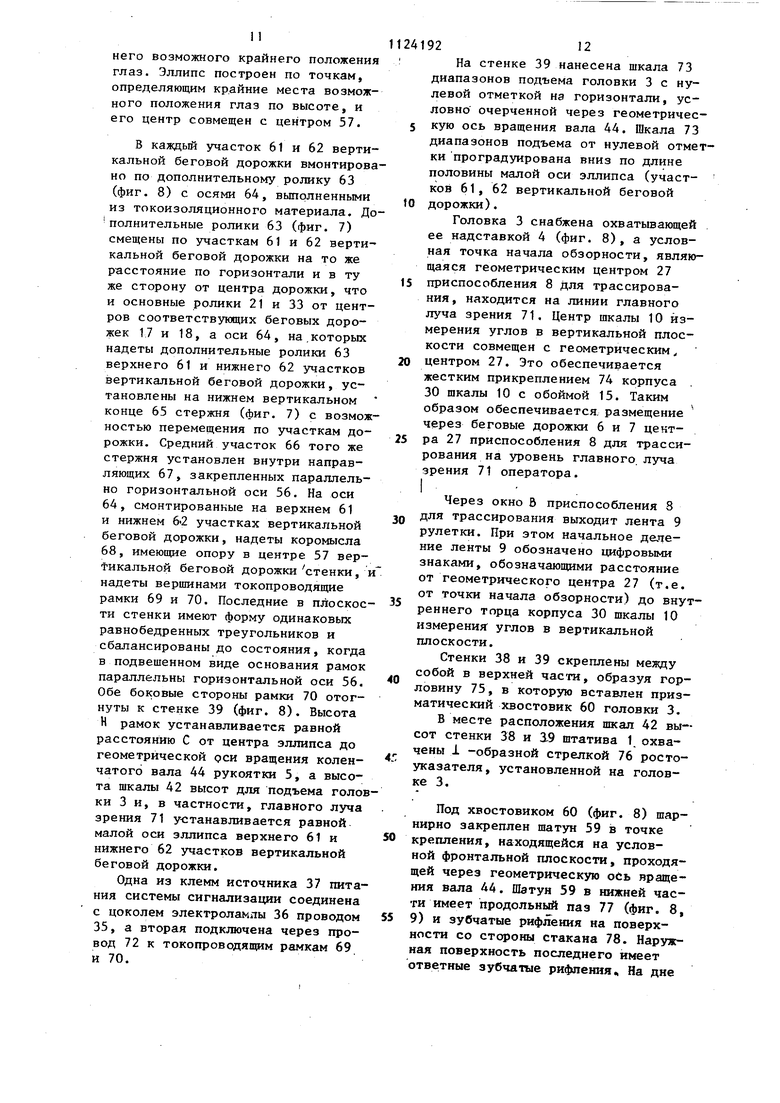
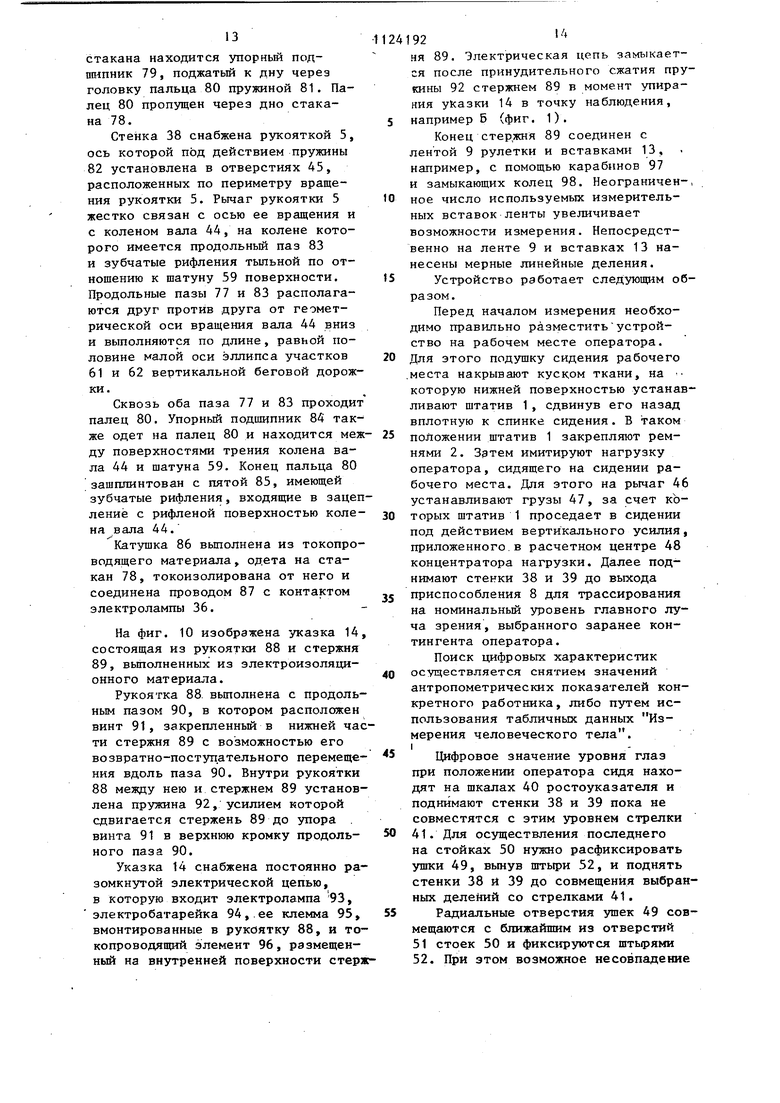
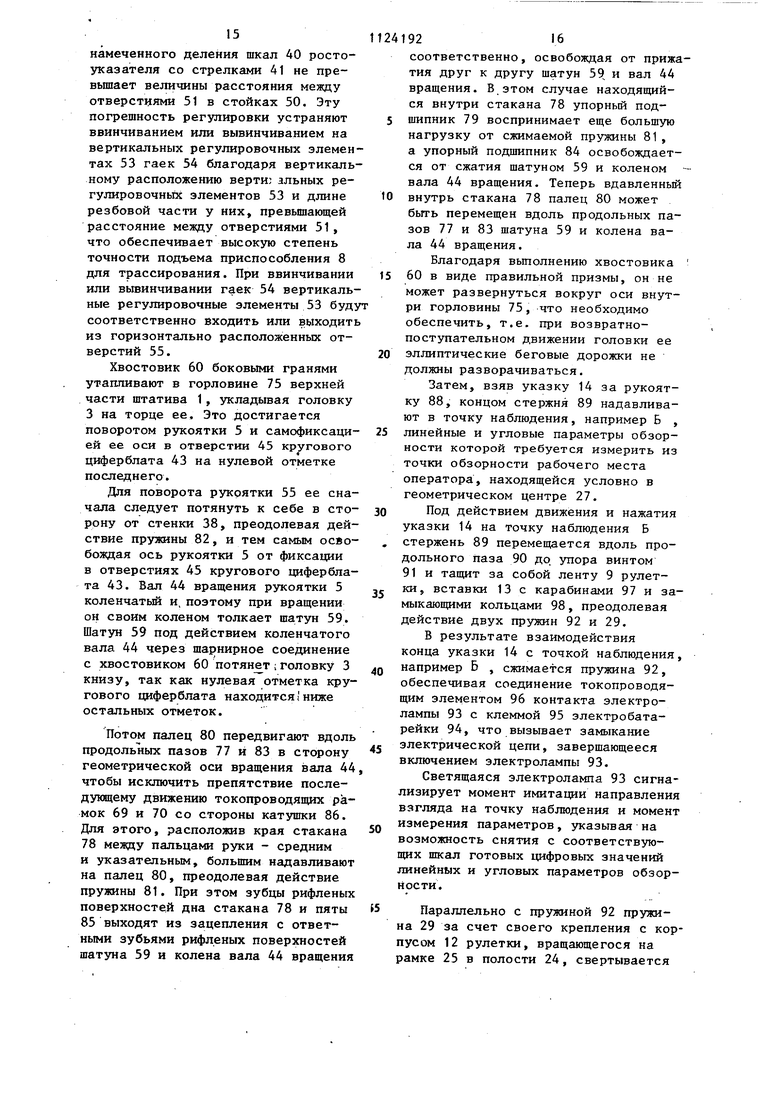
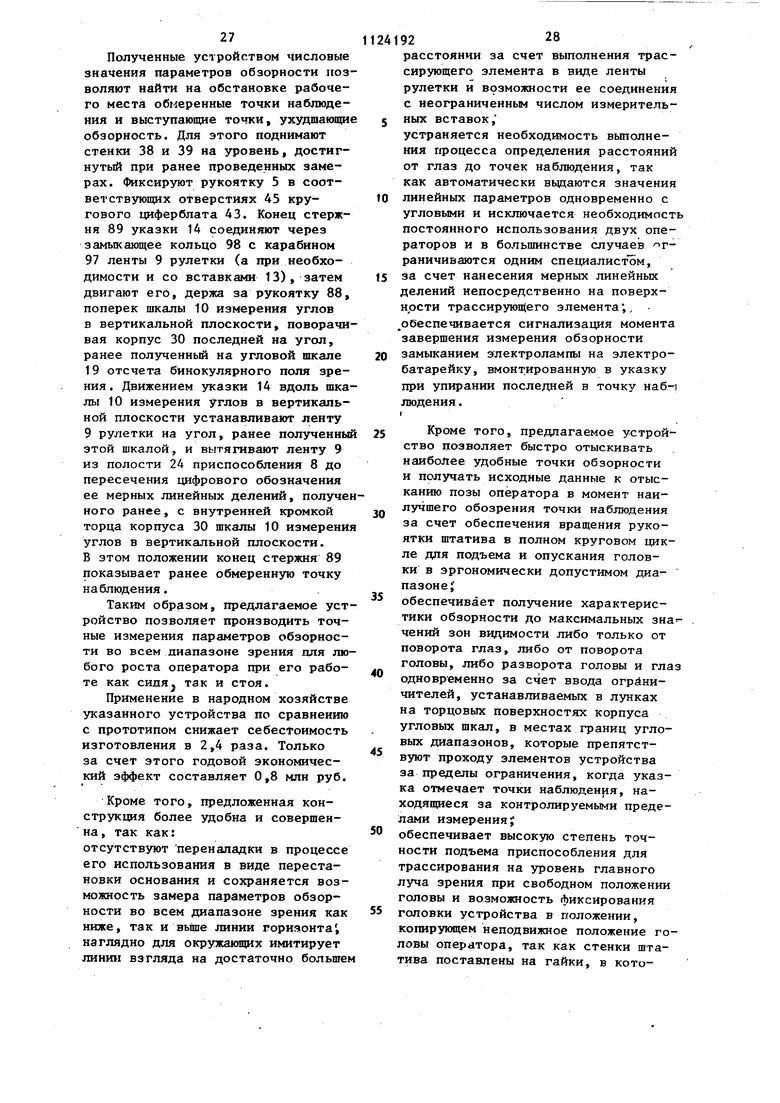
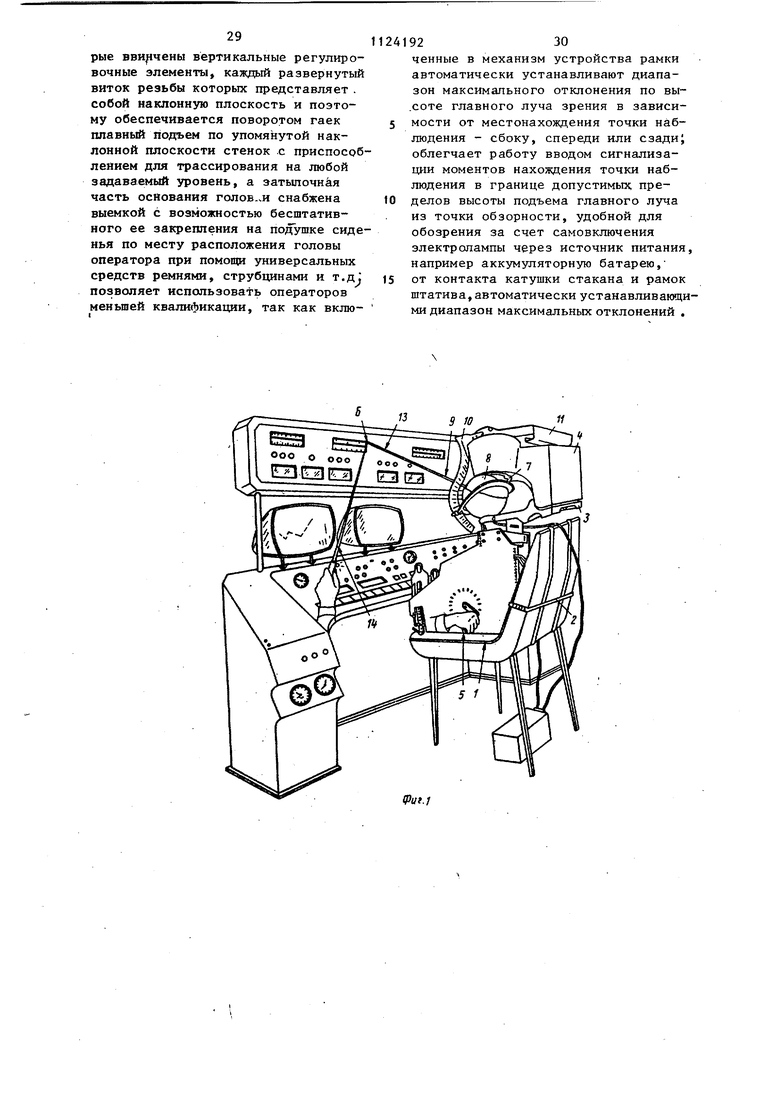
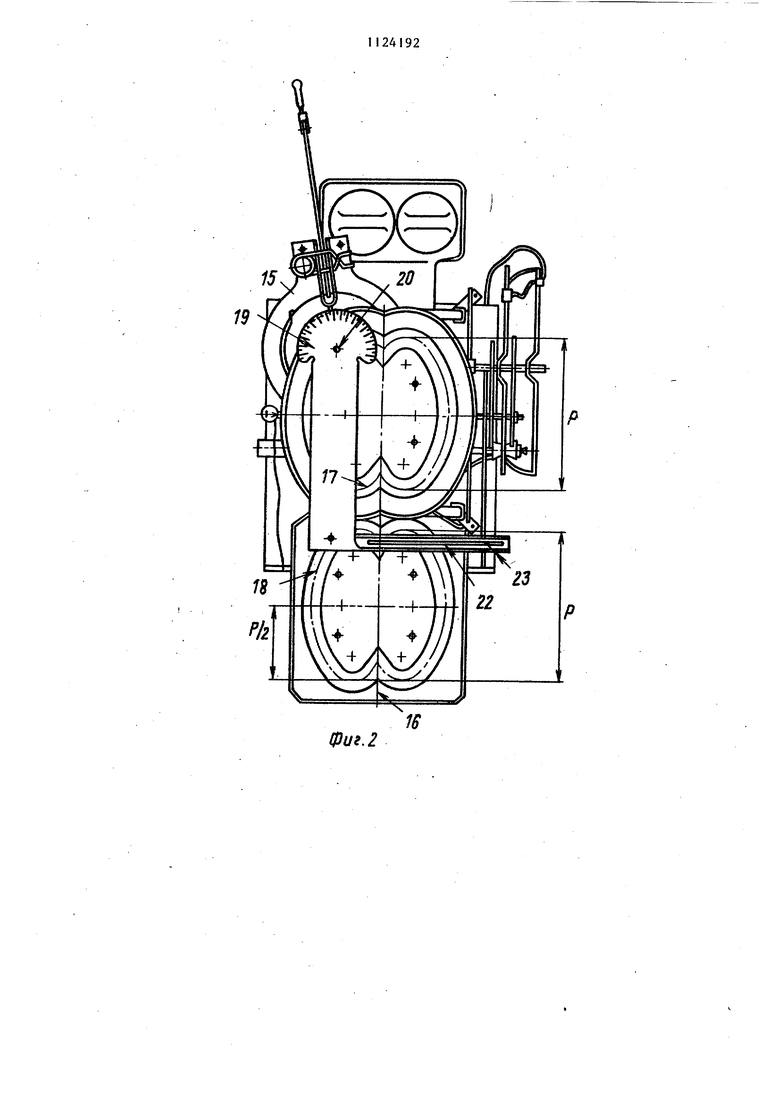
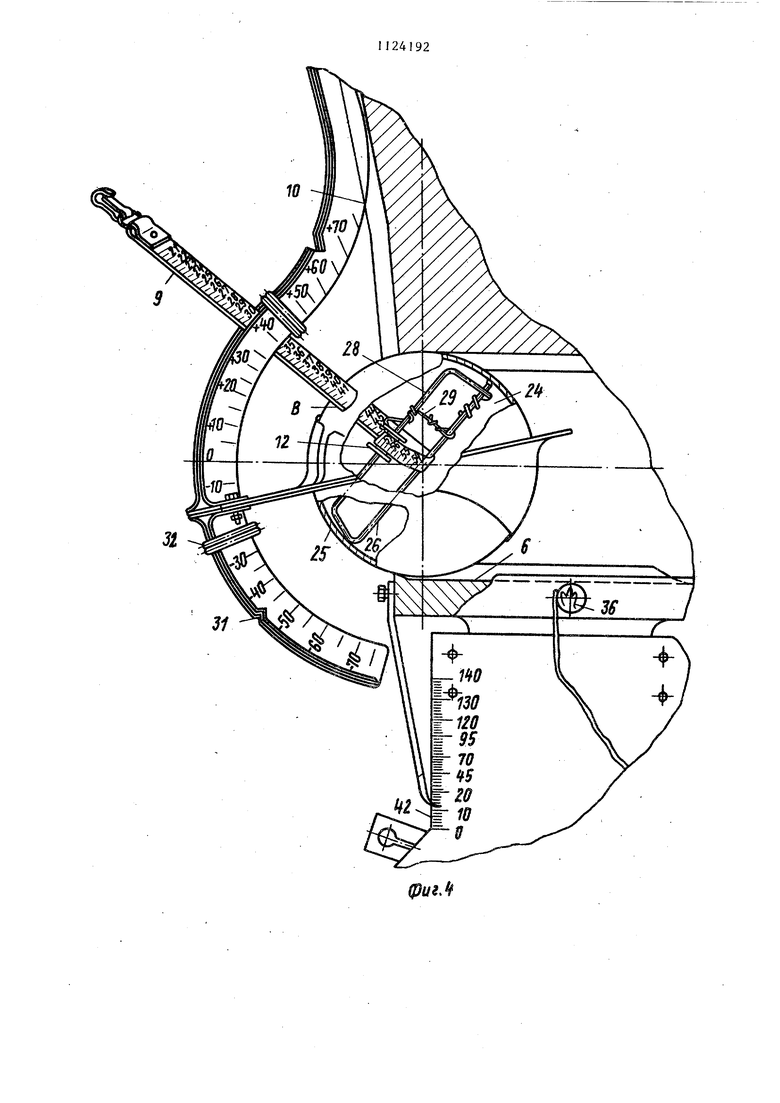
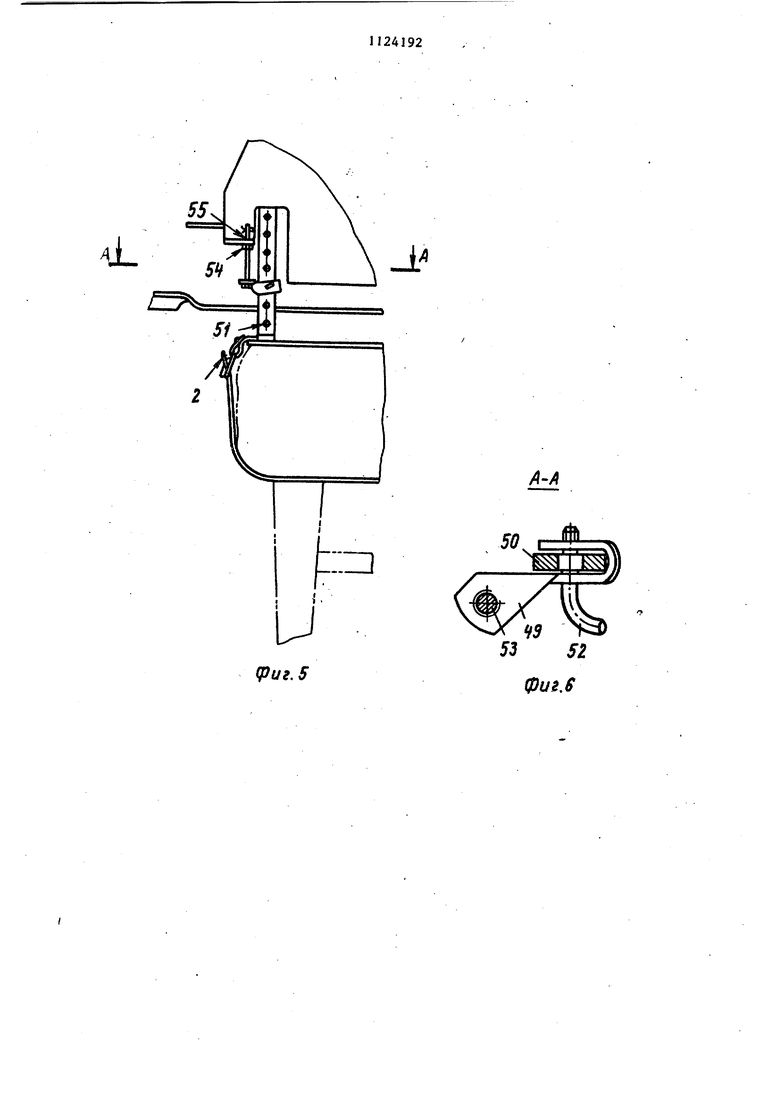
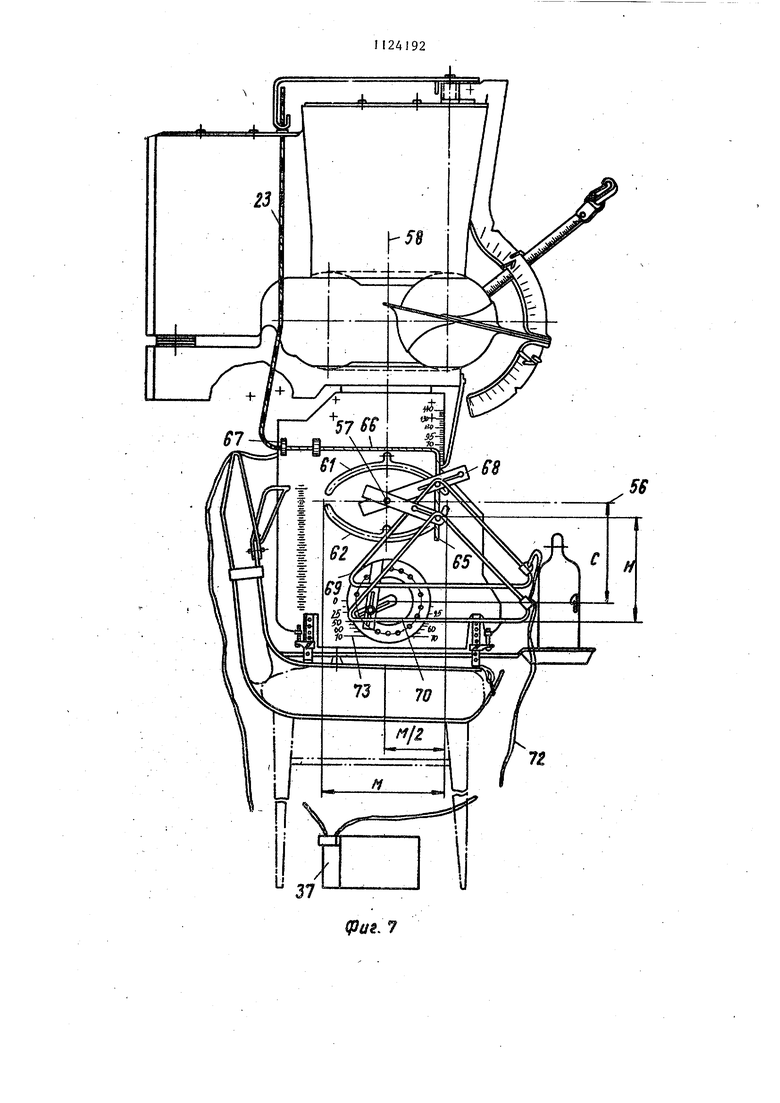
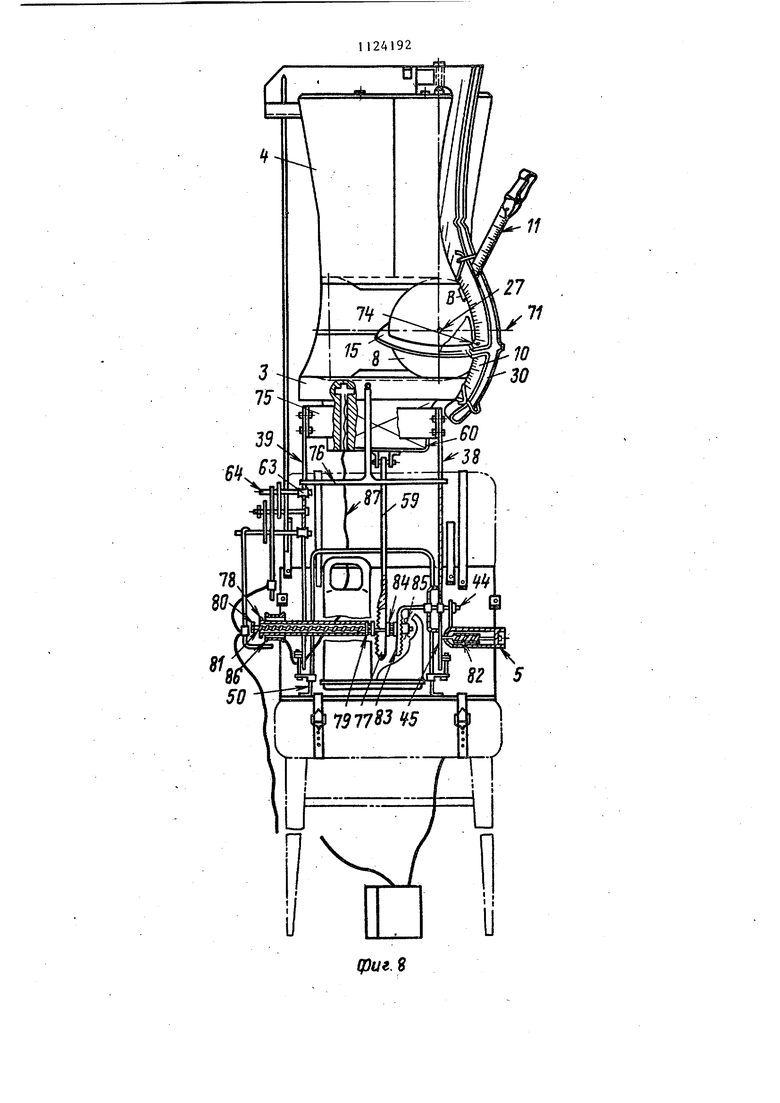
55 надставки, а верхняя часть .щтатива образована параллельными продольной вертикальной плоскости двумя стенка-i ми, скрепленными меяоду собой в верх$ней части, в которую установлен до упора хвостовик головки с возможностью вертикального перемещения, причем на одной из стенок смонтированы круговой циферблат и подпружиненная поворотная рукоятка, установленная с возможностью фиксации в отверстиях циферблата, а вал вращения рукоятки выполнен коленчатым и над ним, вокруг центра, размещенного на пересечении горизонтали с условной фронтальной плоскостью, проходящей через геометрическую ось вращения вала, на противоположной стенке расположены верхний и нижний участки вертикальной беговой дорожки, выполненной по эллипсу, построенному на горизонтальной геометрической оси, равной длине большой оси эллипса основной беговой дорожки надставки по точкам, определяющим крайние места возможного положения глаз по высоте, при этом на участках вертикальной бего вой дорожки смонтировано по дополнительному ролику, смещенному на т же расстояние по горизонтали и в т же сторону от центра дорожки, что и основные указанные ролики на ставки от центров соответствующих беговых дорожек, а оси, на которых надеты ролики вертикальной беговой дорожки, установлены на стержне с возможностью перемещения по участкам дорожки, который пропущен, через коромысло, выполненное L -образной формы с перекладиной у задней дорожки надставки, при этом стенки штатива снабжены шкалами высот, равными длине малой оси эллипса и охвачены 1 -образной стрел кой, установленной на указанной го ловке , под хвостовиком которой шарнирно закреплен шатун, через ко нец которого и колено указанного вала вращения рукоятки пропущен попружиненный палец, снабженный по вижно .закрепленным стаканом и неподвижной пятой для фиксации шатуна и указанного вала, а на оси дополнительных роликов, смонтированн на верхнем и нижнем участках указанной беговой дорожки стенки, надеты вершинами рамки, имеющие фо му равнобедренных треугольников, высота которых равна расстоянию от центра эллипса до геометрическо оси вращения коленчатого вала, ниж 26 которой на стенке штатива нанесена шкала диапазонов подъема головки, длина которой соответствует половине малой оси указанного эллипса, при этом обе рамки электроизолированы от стенки, выполнены из токопроводящего материала, подсоединены к одной из клемм источника питания и расположены с возможностью контактирования с контактом электролампы, цоколь которой подсоединен к второй клемме источника питания, на основании штатива вертикально закреплены стойки и горизонтально расположены стрелки ростоуказателя, указанные стенки штатива снабжены шкалами ростоуказателя и установлены на вертикальные регули)овочные элементы, а затылочная часть основания головки снабжена выемкой для ее закрепления в зоне фиксации головы оператора. При этом трассирующий элемент выполнен в виде ленты со вставками, на которых имеются мерные линейные деления, связанной со втягивающей пружиной. Кроме того, с целью обеспечения сигнализации момента взгляда оператора на точку наблюдения и измерения соответствзпощих параметров, упомянутая указка состоит из стержня , вставленного в рукоятку с пррдольным пазом, и -снабжена электро-° лампой с возможностью замыкания ее контакта на клемму электробатарейки, которая вмонтирована в рукоятку с токопроводящим элементом подпружиненного стержня при контакте указки с точкой наблюдения. На фиг. 1 схематично изображено предлагаемое устройство, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, вид слева с частичными разрезами головки, надставки, приспособления для трассирования и штативаj на фиг, 4 - место, где приспособление для трассирования запирается в пространстве, ограниченном поверхностями основной и дополнительной дорожками шаровидного профиля головки и надставки, и разрезы упомянутого прислособления; на фиг. 5 - место, где стенки штатива поставлены на вертикально установленные регулировочные элементы; на фиг. 6 - разрез А-А на фиг. 5; на фиг. 7 - устройство, вяп 7 . справа; на фиг. 8 - то же, вид спереди с частичными разрезами стенок стакана, катушки, грузов, шатуна, колена коленчатого вала, рукоятки, горловины верхней части крепления стенок и хвостовика головки; на фиг. 9 - место крепления колена коленчатого вала с шатуном; на , фиг. 10 - указка с част 4ными разрезами деталей. Устройство для измерения парамет ipoB обзорности рабочего места (см. фиг. 1) содержит установленный на сиденьи оператора штатив 1 с ремнями 2 для крепления его к сиденью и смонтированный на штативе 1 воспроизводящий крайние места возможного положения глаз оператора элемент, вьтолненный в виде головют 3. Голов ка 3 охватывается надставкой 4 и установлена с возможностью вертикал ного перемещения при помощи рукоятки 5. Надставка 4 имеет соответствующую основной 6 (фиг. 3) дополнитель ную 7 нижнюю эллиптическую беговую дорожку, вьтолненную по точкам, определяющим крайние места положения глаз оператора в плоскости горизонта. Нижней дополнительной беговой дорожкой 7 надставка 4 запирает при способление 8 для трассирования, снабженное трассирующим элементом 9, имеющее возможность поворота вок руг геометрических вертикальной и горизонтальной перпендикулярной трассирующему элементу 9 осей за счет вьшолнения приспособления 8 в форме шара и ответного шаровидного профиля горизонтально расположенных беговых дорожек основной 6 и дополнительной 7 (фиг. 3, 4). Приспособление 8 для трассирования снабжено подвижно закрепленной дугообразной шкалой 10 измерения углов в вертикальной плоскости (фиг. 1,4) и соединено с горизонтально расположенным коромыслом 11 (фиг. 1,3). Роль трассирующего элемента в устройстве выполняет несгибаемая в поперечном направлении лента 9 свернутой в корпусе 12 рулетки. Лен та 9 свободным концом может соединяtьcя в вставками 13 и концом указ ки 14, указывающей на точку наблюдения Б. 928 Часть обоймы 15 охватывает кольцом наружную поверхность приспособления 8 для.трассирования свободно с возможностью концентричного вращения (фиг. 2). Большая геометрическая ось 16 лежит в продольной вертикальной плоскости, условно проходящей вдоль головки 3 с надставкой 4. Верхняя часть надставки 4 снабжена дополнительными верхними передней 17 и задней 18 эллиптическими беговыми дорожками, соответствующими основной 6 беговой дорожке головки 3. Верхние беговые дорожки 17 и 18 размещены на большой геометрической оси 16. Передняя беговая дорожка 17 выполнена проекционно над дорожками 6 и 7 в виде замкнутой эллиптической кривой по точкам, определяющим крайние места возможного положения глаз оператора в плоскости горизонта. Беговая дорожка 18 вьтолнена той же формы и тех же размеров, что и дорожка 17 (для примера см. расстояние от переднего до заднего максимально возмолмого положения глаз в плоскости горизонта)., но сдвинута назад вдоль большой геометрической оси 16 на величину дорожки. J На коромысле 11, выполненном L -образной формы, имеется угловая шкала 19 отсчета бинокулярного поля зрения оператора, центр которой совмещен с осью 20 (фиг. 3) одного из основных роликов 21, вмонтированного в переднюю дорожку 17. Кроме того , коромысло 11 вдоль своей перекладины у задней дорожки 18 имеет паз 22 (фиг. 2), через который пропущен верхний конец 23 подвижного стержня (фиг. 7). I Приспособление 8 для трассирования (фиг. 3) внутри имеет полость 24 (фиг. 4), в которой закреплен трассирующий элемент 9, а снаружи охватывается горизонтально расположенными замкнутыми беговыми дорожками 6 и 7 головки 3 и надставки 4 с возмежностью перемещения по ним. Внутри полости 24 закреплена рамка 25, сторона 26 которой равна диаметру полости 24 приспособления 8 для трассирования. Поэтому сторона 26 рамки 25 проходит через геоетрический центр 27 (фиг. 8) последнего, являющийся точкой обзорности. Через сторону 26 рамки 25 перекинут перед выходом из окна В .(фиг. 3, 4) трассирующий элемен 9, а на противоположную меньшую ст рону 28 рамки 25, находящуюся ближе к окну В , надет корпус 12 рулетки. Внутрь корпуса 12 втягива- ется лента 9 под воздействием связанной с ней втягивающей пружины 2 На торцовой поверхности корпуса 30 (фиг. 8) шкалы 10 измерения углов в. вертикальной плоскости у циф ровых обозначений предельных значений зон видимости для поворота глаз, головы, одновременного разво рота и головы, и глаз вьтолнены лу ки 31 (фиг. 3, 4). Наличие ограничителей 32, установленных в соответствующих лунках 31, препятствую заходу за их пределы ленты 9 рулет ки. Верхняя часть корпуса 30 шкалы 10 измерения углов в вертикальной плоскости вьтолнена в виде петли и одета на вертикальную ось 20 основного ролика 21 , чем достигнута соосность ролика 21 с приспособлением В для трассирования. На ту же ось 20 надет конец коромысла 11, другой конец которого надет на ось основного ролика 33, вмонтированного в заднюю беговую дорожку 18 надставки 4 с возможнос тью перемещения конгруэнтно в одном направлении с основным роликом 21. Головка 3 снабжена выемкой 34 в своей затыпочной части для размеще ния при определении параметров обзорности неподвижно закрепленной г ловы оператора. Глубина выемки 34 и другие размеры, определяющие ее расположение относительно условног центра поворота головы и сиденья оператора, выбираются по усредненным значениям из таблиц измерения человеческого тела. Устройство снабжено системой . сигнализации о крайних положениях подъема головки 3, где провод 35 соединяет цоколь электролампы 36, вмонтированной в головку 3, с источником 37 питания, например акку муляторной батареей. Кроме того, на стенках 38 и 39 верхней части штатива (фиг. 8) нан сены шкалы 40 ростоуказатепя 9210 (фиг. 3), имеются горизонтально расположенные стрелки 41 ростоуказателя, неподвижно закрепленные на штативе 1, и шкалы 42 высот подъема головки 3. На стенке 38 (фиг. 8) смонтирована рукоятка 5 и имеется круговой циферблат (фиг. 3) , центр которого совмещен с геометрической осью врадения коленчатого вала 44 рукоятки 5. Нулевая отметка циферблата 43 находится внизу, а девятая вверху. Циферблат 43 выполнен с отверстиями 45 по периметру движения рукоятки 5 для фиксации в них последней. Штатив 1 снабжен рычагом 46 и грузами 47 для сообщения устройству вертикального усилия, приложенного в расчетном центре 48 концентратора нагрузки, расположенном на пересечении вертикальной плоскости, параллельной продольной оси сиденья, и воображаемой оси поворота бедра относительно торса оператора (когда последний занимает сиденье рабочего места). Ушки 49 (фиг. 3i 6) осевыми отверстиями одеты на закрепленные на штативе 1 стойки 50 (фиг. 8, 9) а радиальными отверстиями зафиксированы в отверстиях 51 (фиг. 3,5) стоек 50 при помощи штырей 52 (фиг. 6). В ушки 49 вертикально ввинчены вертикальные регулировочные элементы 53 длиной резьбовой части, превьш1ающей расстояние между отверстиями 51 стоек 50. Вертикальные регулировочные элементы 53 снабжены гайками.54 (фиг. 5) и пропушены через горизонтально расположенные отверстия 55 стенок 38 и 39. На гайки 54 поставлены стенки 38 и 39 параллельно продольной вертикальной плоскости. На фиг. 7 показана горизонтальная ось 56 и центр 57 вертикальной эллипсной беговой дорожки стенки на этой оси, размещенный в месте ее пересечения с условной фронтальной плоскостью 58, проходящей через геометрическую ось вращения вала 44 и место крепления шатуна 59 (фиг. 8, 9) 1| хвостовику 60 головки 3 (фиг. 8). Вокруг центра 57 расположены верхНИИ 61 и нижний 62 участки вертикальной беговой дорожки, вьшолненно по эллипсу длиной М , равной расстоянию Р (фиг. 2) от переднего до заднего возможного крайнего положения глаз. Эллипс построен по точкам, определяющим крайние места возможного положения глаз по высоте, и его центр совмещен с центром 57. В каждьй участок 61 и 62 вертикальной бего.вой дорожки вмонтирова но по дополнительному ролику 63 (фиг, 8) с осями 64, вьтолненными из токоизоляционного материала. До полнительные ролики 63 (фиг. 7) смещены по участкам 61 и 62 вертикальной беговой дорожки на то же расстояние по горизонтали и в ту же сторону от центра дорожки, что и основные ролики 21 и 33 от центров соответствующих беговых дорожек 17 и 18, а оси 64, на,которых надеты дополнительные ролики 63 верхнего 61 и нижнего 62 участков вертикальной беговой дорожки, установлены на нижнем вертикальном конце 65 стержня (фиг. 7) с возмож ностью перемещения по участкам дорожки. Средний участок 66 того же стержня установлен внутри направляющих 67, закрепленных параллельно горизонтальной оси 56. На оси 64, смонтированные на верхнем 61 и нижнем 6-2 участках вертикальной беговой дорожки, надеты коромысла 68, имеющие опору в центре 57 вертикальной беговой дорожкистенки, надеты вершинами токопроводящие рамки 69 и 70. Последние в плоскос ти стенки имеют форму одинаковых равнобедренных треугольников и сбалансированы до состояния, когда в подвешенном виде основания рамок параллельны горизонтальной оси 56. Обе боковые стороны рамки 70 отогнуты к стенке 39 (фиг. 8). Высота Н рамок устанавливается равной расстоянию С от центра эллипса до геометрической реи вращения коленчатого вала 44 рукоятки 5, а высота щкалы 42 высот для подъема голо ки 3 и, в частности, главного луча зрения 71 устанавливается равной малой оси эллипса верхнего 61 и нижнего 62 участков вертикальной беговой дорожки. Одна из клемм источника 37 пита ния системы сигнализации соединена с цоколем электролампы 36 проводом 35, а вторая подключена через провод 72 к токопроводящим рамкам 69 и 70. 212 На стенке 39 нанесена шкала 73 диапазонов подъема головки 3 с нулевой отметкой на горизонтали, условно очерченной через геометрическую ось вращения вала 44. Шкала 73 диапазонов подъема от нулевой отметки проградуирована вниз по длине половины малой оси эллипса (участков 61, 62 вертикальной беговой дорожки). Головка 3 снабжена охватывающей ее надставкой 4 (фиг. 8), а условная точка начала обзорности, являющаяся геометрическим центром 27 приспособления 8 Для трассирования , находится на линии главного луча зрения 71. Центр шкалы 10 измерения углов в вертикальной плоскости совмещен с геометрическим центром 27. Это обеспечивается жестким прикреплением 74 корпуса . 30 шкалы 10 с обоймой 15. Таким образом обеспечивается, размещение через беговые дорожки 6 и 7 центра 27 приспособления 8 для трассирования на уровень главного, луча зрения 71 оператора. Через окно В приспособления 8 Д- трассирования выходит лента 9 рулетки. При этом начальное деление ленты 9 обозначено цифровыми знаками, обозначающими расстояние от геометрического центра 27 (т.е. от точки начала обзорности) до внутреннего торца корпуса 30 шкалы 10 измерения углов в вертикальной плоскости. Стенки 38 и 39 скреплены между собой в верхней части, образуя горловину 75, в которую вставлен призматический хвостовик 60 головки 3. В месте расположения шкал 42 высот стенки 38 и 19 штатива 1. охвачены 1 -образной стрелкой 76 ростоуказателя, установленной на головке 3. Под хвостовиком 60 (фиг. 8) шарнирно закреплен шатун 59 в точке крепления, находящейся на условной фронтальной плоскости, проходящей через геометрическую оСь вращения вала 44. Шатун 59 в нижней части имеет продольный паз 77 (фиг, 8, 9) и зубчатые рифления на поверхности со стороны стакана 78. Наружная поверхность последнего имеет ответные зубчатые рифлешм. На дне 13 стакана находится упорный подпмпник 79, поджатый к дну через головку пальца 80 пруяданой 81. Палец 80 пропущен через дно стакана 78. Стенка 38 снабжена рукояткой 5, ось которой под действием пружины 82 установлена в отверстиях 45, расположенных по периметру вращения рукоятки 5. Рычаг рукоятки 5 жестко связан с осью ее вращения и с коленом вала 44, на колене которого имеется продольньй паз 83 и зубчатые рифления тыпьной по отношению к щатуну 59 поверхности. Продольные пазы 77 и 83 располагаются друг против друга от геометрической оси вращения вала 44 вниз и выполняются по длине, равной половине малой оси эллипса участков 61 и 62 вертикальной беговой дорожки. Сквозь оба паза 77 и 83 проходит палец 80. Упорный подшипник 84 также одет на палец 80 и находится меж ду поверхностями трения колена вала 44 и шатуна 59. Конец пальца 80 защшшнтован с пятой 85, имеющей зубчатые рифления, входящие в зацеп ление с рифленой поверхностью колена вала 44. Катушка 86 вьтолнена из токопроводящего материала одета на стакан 78, токоизолирована от него и соединена проводом 87 с контактом электролампы 36. На фиг. 10 изображена указка 14 состоящая из рукоятки 88 и стержня 89, вьтолненных из электроизоляционного материала. Рукоятка 88. вьтолнена с продоль ным пазом 90, в котором расположен винт 91, закрепленный в нижней ча ти стержня 89 с возможностью его возвратно-поступательного перемеще ния вдоль паза 90. Внутри рукоятки 88 между нею и стержнем 89 установ лена пружина 92, усилием которой сдвигается стержень 89 до упора . винта 91 в верхнюю кромку продольного паза 90. Указка 14 снабжена постоянно ра зомкнутой электрической цепью, в которую входит электролампа 93, электробатарейка 94,.ее клемма 95, вмонтированные в рукоятку 88, и то копроводящий элемент 96, размещенный на внутренней поверхности стерж ня 89. Электрическая цепь замыкается после принудительного сжатия прукины 92 стержнем 89 в момент упирания указки 14 в точку наблюдения, например б (фиг. 1). Конец стер,жня 89 соединен с лентой 9 рулетки и вставками 13, например, с помощью карабинов 97 и замыкающих колец 98. Неограничен-, ное число используемых измерительных вставок ленты увеличивает возможности измерения. Непосредственно на ленте 9 и вставках 13 нанесены мерные линейные деления. Устройство работает следующим образом. Перед началом измерения необходимо правильно разместитьустройство на рабочем месте оператора. Для этого подушку сидения рабочего места накрывают куском ткани, на которую нижней поверхностью устанавливают штатив 1 , сдвинув его назад вплотную к спинке сидения. В таком положении щтатив 1 закрепляют ремнями 2. Затем имитируют нагрузку оператора, сидящего на сидении рабочего места. Для этого на рычаг 46 устанавливают грузы 47, за счет которых штатив 1 проседает в сидении под действием вертикального усилия, приложенного.в расчетном центре 48 концентратора нагрузки. Далее поднимают стенки 38 и 39 до выхода приспособления 8 для трассирования на номинальный уровень главного луча зрения, выбранного заранее контингента оператора. Поиск цифровых характеристик осуществляется снятием значений антропометрических показателей конкретного работника, либо путем использования табличных данных Измерения человеческого тела. I Цифровое значение уровня глаз при положении оператора сидя находят на шкапах 40 ростоуказателя и поднимают стенки 38 и 39 пока не совместятся с этим уровнем стрелки 41. Для осуществления последнего на стойках 50 нужно расфиксировать ушки 49, вынув штыри 52, и поднять стенки 38 и 39 до совмещения выбранных делений со стрелками 41. Радиальные отверстия ушек 49 совмещаются с ближайщим из отверстий 51 стоек 50 и фиксируются штьфями 52. При этом возможное несовпадение 15 намеченного деления шкал 40 ростоуказателя со стрелками 41 не превьшает величины расстояния между отверстиями 51 в стойках 50. Эту погрешность регулировки устраняют ввинчиванием или вывинчиванием на вертикальных регулировочных элемен тах 53 гаек 54 благодаря вертикальному расположению верти; дльных регулировочньтх элементов 53 и длине резбовой части у них, превьш1ающей расстояние между отверстиями 51, что обеспечивает высокую степень точности подъема приспособления 8 для трассирования. При ввинчивании или вьюинчивании гаек 54 вертикальные регулировочные элементы 53 буду соответственно входить или выходить из горизонтально расположенных отверстий 55. Хвостовик 60 боковыми гранями утапливают в горловине 75 верхней части штатива 1, укладывая головку 3 на торце ее. Это достигается поворотом рукоятки 5 и самофиксацией ее оси в отверстии 45 кругового Ц1 ерблата 43 на нулевой отметке последнего. Для поворота рукоятки 55 ее сначала следует потянуть к себе в сторону от стенки 38, преодолевая действие пружины 82, и тем самым освобождая ось рукоятки 5 от фиксации в отверстиях 45 кругового циферблата 43. Вал 44 вращения рукоятки 5 коленчатьй и, поэтому при вращении он своим коленом толкает шатун 59. Шатун 59 под действием коленчатого вала 44 через шарнирное соединение с хвостовиком 60 потян ет ; головку 3 книзу, так как нулевая отметка кругового циферблата находится ниже остальных отметок. Потом палец 80 передвигают вдоль продольных пазов 77 и 83 в сторону геометрической оси вращения вала 44 чтобы исключить препятствие последующему движению токопроводящих рамок 69 и 70 со стороны катушки 86. Для этого, расположив края стакана 78 между пальцами руки - средним и указательным, большим надавливают на палец 80, преодолевая действие пружины 81. При этом зубцы рифленых поверхностей дна стакана 78 и пяты 85 выходят из зацепления с ответными зубьями рифленых поверхностей шатуна 59 и колена вала 44 вращения 9216 соответственно, освобождая от прижатия друг к другу шатун 59 и вал 44 вращения. В этом случае находящийся внутри стакана 78 упорный подшипник 79 воспринимает еще большую нагрузку от сжимаемой пружины 81, а упорный подшипник 84 освобождается от сжатия шатуном 59 и коленом вала 44 вращения. Теперь вдавленный внутрь стакана 78 палец 80 может быть перемещен вдоль продольных пазов 77 и 83 шатуна 59 и колена вала 44 вращения. Благодаря выполнению хвостовика 60 в виде правильной призмы, он не может развернуться вокруг оси внутри горловины 75, что необходимо обеспечить, т.е. при возвратнопоступательном движении головки ее эллиптические беговые дорожки не должны разворачиваться. Затем, взяв указку 14 за рукоятку 88, концом стержня 89 надавливают в точку наблюдения, например Б , линейные и угловые параметры обзорности которой требуется измерить из точки обзорности рабочего места оператора, находящейся условно в геометрическом центре 27. Под действием движения и нажатия указки 14 на точку наблюдения Б стержень 89 перемещается вдоль продольного паза 90 до. упора винтом 91 и тащит за собой ленту 9 рулетки, вставки 13 с карабинами 97 и замыкающими кольцами 98, преодолевая действие двух пружин 92 и 29. В результате взаимодействия конца указки 14 с точкой наблюдения, например Б , сжимается пружина 92, обеспечивая соединение токопроводящим элементом 96 контакта электролампы 93 с клеммой 95 электробатарейки 94, что вызывает замыкание электрической цепи, завершающееся включением электролампы 93. Светящаяся электролампа 93 сигнализирует момент имитации направления взгляда на точку наблюдения и момент измерения параметров, указывая на возможность снятия с соответствующих шкал готовых цифровых значений линейных и угловых параметров обзорности. Параллельно с пружиной 92 пружина 29 за счет своего крепления с корпусом 12 рулетки, вращающегося на рамке 25 в полости 24, свертывается 17 в спираль вокруг меньшей стороны 2 рамки 25 и наматывает ленту 9 на катушку корпуса 12. При натягивании лента 9 опирает ся на кромки окна В в приспособлен 8 для трассирования, за счет чего поворачивает последнее, так как он выполнено в виде шара и подвижно установлено в горизонтально распол женной замкнутой эллиптической основной беговой дорожке 6 головки 3 и запирается дополнительной бегово дорожкой 7, выполненной внизу надставки 4, охватывающей головку 3, чем удерживает приспособление 8. Поворот осуществляется до тех пор, пока не совпадет геометрический центр 27 с Ш1ОС5состью прорези под ленту в корпусе 30 шкалы 10 измере ния углов в вертикальной плоскости которая всегда вертикальна, и вертикальной плоскостью, каждый раз п лучаемой при вытягивании ленты 9 из окна В приспособления В для трассирования в период противодействия пружины 29. Корпус 30 шкалы 10 измерения углов в вертикальной плоскости поворачивает ленту 9 мен шей стороной ее прямоугольного четырехугольного сечения, расположен ной параллельно линии горизонта, и как не сгибаемой в поперечном направлении практически сводит на нет прогиб трассирующего элемента от провисания. Точность имитации и замера расстояния от глаз до точки наблюдентя получается за счат обеспечения натяжки прямой всей измерительной цепи, состоящей из ленты 9 и вставок 13, на всем протяжении от геометрического центра 27, где лента перекинута через диаметрально рас:положенную сторону 26 рамки 25 до самого конца стержня 89 указки 14, упирающейся -в точку наблюдения например Ь . Лента 9, выйдя из окна В приспособления 8 для трассирования, ув лекает за собой корпус 30 шкалы 10 измерения углов в вертикальной плоскости, соединения 74 и обойму 15, а также коромысло 11 и само пр способление 8 для трассирования Поэтому последнее вне зависимости от своего первоначального местонахождения - справа или слева относительно большой геометрической ос 218 16, лежащей в продольной вертикальной плоскости, перемещается по охватьтающим ее горизонтально расположенным замкнутым эллиптическим беговьгм дорожке 6 головки 3 и дорожке 7 надставки 4, охватывающей головку 3, останавливаясь внутри дорожек 6 и 7, выбирая ближайшее расстояние до точки наблюдения, например Б, так как подтягивается к ней силой действия пружины 29. Оси основных роликов 21 и 33 вертикальны, а поэтому лежат в одной плоскости, параллельной продольной вертикальной, и поэтому ролики 21 и 33 путемтолкания через ось 20 корпусом 30 шкалы 10 .измерения углов в вертикальной плоскости при конгруэнтном движении по беговым дорожкам 17 и 18 будут перемещаться коромыслом 11 с угловой шкалой 19, отсчета бинокулярного поля зрения параллельно самим себе, что обеспечивает постоянную ориентацию цифровых значений шкалы 19. Сдвиг относительно передней дополнительной беговой дорожки 17 задней дополнительной беговой дорожки 18 вдоль большой геометрической оси 16 на величину дорожки обеспечивает полное перемещение коромысла 11. L -образный корпус коромысла 11 двигает своей перекладиной вдоль большой геометрической оси 16 пропущенный через паз 22 верхний вертикальный конец 23 стержня, который потянет свой средний участок 66 вдоль направляющих 67, Последние, благодаря расстановке параллельно оси 56, в свою очередь горизонтальной, направят средний участок 66 с нижним концом 65 вдоль горизонтальной прямой. Это заставит по верхнему 61 и нижнему 62 участкам вертикальной беговой дорожки двигаться дополнительным роликам 63, увлекаемь нижним вертикальным концом 65 стерж ня через их оси 64. Работа коромысел 68 и расположение точки их опоры в центре 57 дорожки способствует постоянному поддержанию осей 64 в горизонтальном положении, что недопустит заклинивание роликов 63 в участках вертикальной беговой дорожки. Благодаря высоте рамок Н , равной расстоянию от центра 57 эллипса до геометрической оси вращения вала 44, основание равнобедренной рамки 69 перемещается от геометрической оси вращения вала 44 к условному верхнему пределу под ема головки, а основание равнобедренной треугольной рамки 70 перемещается от оси вращения вала 44 к нижнему пределу вдоль шкалы 73 диапазонов подъема головки. Расстановка роликов 63 на то же расстояние по горизонтали от центра 57, что и кал|дого из роликов 21 и 3 от центра дорожек 17 и 18 обеспечивает их конгруэнтное перемещение в участках вертикальной беговой дорож ки. Равенство длиН и Р , характеризующих расстояниемежду возможными крайними перед1шми и задними пол жениями глаз по высоте и в плоскост горизонта, обеспечивает возможность параллельного движения в одном направлении вертикальных концов 23 и 65 стержня и приспособления 8 для трассирования. Поэтому основаниями равнобедренных треугольных рамок 69 и 70 автоматически ограничивается эргономиче ки допустимое максимальное отклонение по высоте главного луча зрения 71 относительно номинального положения для той точки наблюдения, на которую надавлено концом стержня 89 указки 14. Поскольку, рамка 70 проходит путь в половину диапазона отклонения головки по высоте, то .шкала 73 диапазонов подъема головки имеет длину, соответствующую половине вместо диа пазона, т.е. от геометрической оси вращения коленчатого вала 44 вниз н величину половины малой оси эллипса вертикальной беговой Дорожки, вьтолненной участками 61 и 62 на стенке 39, и цифровые значения максимально допустимого отклонения по высоте на шкале 73 диапазонов будут соответствовать только односторонним. После этого обеспечивается возможность подъема головки 3 в эргономически допустимых пределах диапазона при взгляде на точку наблюдения с рабочего места оператора. Для этого при положении рукоятки 5 на нулевой отметке кругового циферб лата 43 палец 80 перемещают вдоль 220 продольных пазов 77 и 83 шатуна 59 и колена вала 44 вращения до соприкосновения поверхности катушки 86 с нижним основанием треугольной рамки 70. Затем выставляют головку 3 на высоту, соответствзтощую уровню глаз при позе оператора вдавившего голову в плечи. Это достигается использованием шкалы 40 ростоуказателя и стрелок 41 путем опускания стенок 38 и 39 с перестановкой штырей 52, ушек 49, гаек 54 на величину, отмеченнзто основанием равнобедренной треугольной рамки 70, т.е. на половину диапазона допустимого отклонения. Установка устройства в исходное положение заканчивается корректировкой уровня номинального положения приспособления для трассирования. Для этого рукоятку 5 проворачивают до тех пор, пока i -образная стрелка 76 не совместится с делением шкалы 42 высот, соотвбтст- вующим пределу на шкале 73 диапазонов , отмеченному основанием равнобедренной треугольной рамки 70. При этом вал 44 вращения своим коленом потянет шатун 59 по периметру своего вращения вокруг геометрической оси вращения коленчатого вала 44. Автоматический вход оснований равнобедренньпс треугольных рамок 69 и 70 вдоль шкалы 73 диапазонов допустимых подъемов главного луча зрения и возможность действия механизма подъема головки обеспечиваются за счет расположения участков 61 и 62 вертикальной беговой дорожки . стенки таким образом, чтобы ее центр 57 и место прикрепления шатуна 59 к хвостовику 60 головки 3 находились в единой условной фронтальной плоскости 58, проходящей через геометрическую ось вращения вала 44. Для осуществления передачи крутящего момента пружина 81 притягивает друг к другу колено вала 44 вращения и шатун 59, а упорньш под-: шипник 79, расположенный на дне стакана 78, даст возможность вращения пальцу 80 внутри стакана 78 и продольного паза 77, что обеспечивает возможность стакану 78 быть неподвижному по отношению к шатуну 59 и одновременно быть подвижному относительно пальца 80, так как после ний проворачивается вокруг своей оси, увлекаемый коленом вала 44 вра щения. Пята .85 зашплинтована с палы цем 80 и фиксируется зубьями на колене вала 44 вращения, обеспечивая неподвижность самой пяты 85 по отношению и к пальцу 80, и к колену вала 44 вращения, а упорньй подшипник 84, расположенный между поверхностями трения шатуном 59 и коленом вала вращения 44, даст возможность поворота вокруг их условной взаимной точки контакта, через которую передается крутящий момент посредством пальца 80. При движении рукоятки 5 по периметру кругового циферблата 43 стакан 78 вместе с нижним концом шатуна 59 проворачивается вокруг пальца 80, т.е. стакан 78 подвижно закреплен. Под влиянием возникшего действия вращением колена вала 44 вращения т тун 59 совершает возвратно-поступательные движения, воздействуя на головку 3 через хвостовик 60. Поэтому хвостовик 60 двинется вдоль горловины 75 в верхней части стенок, поднимая и опуская вместе с головкой 3 приспособление 8 для тра сирования в пределах вьш1еизложенной настройки. Расположение приспособления 8 для трассирования впереди или сзади внутри беговых дорожек .6 и 7 вызывает малое значение на шкале 73 диапазона возможного подъема главного луча зрения, а его положение справа, или слева укажет на большие значения возможного подъема из эргономически допустимого диапазона. При достижении 1 -образной стрелки 76 намеченного деления шкалы 42 высот рукоятку 5 отпускают .и ее ось под действием пружины 82 внедрится во внутрь одного из отвер стий 45 кругового циферблата 4-3. По результатам вышеизложенной настройки геометрический центр 27 приспособления 8 для трассирования перемещением в горизонтальной плоскости, в которой находится главный луч зрения 71, выводится в точку, соответствующую ближайшему местоположению смотрящего с рабочего ме та на точку наблюдения, например В глаза головы, приподнимаемой meei( выбранного контингента оператора из его плеч в исходное ненапряженное положение, среднее между втянутым в плечи и поднятым (вытянутым) на максимально допустимую (возможную) высоту, а натянутая пружиной 29 лента 9 рулетки имитирует направление взгляда в рассматриваемом варианте использования устройства , не входя в соприкосновение с предметами обстановки рабочего места. Далее будет рассматриваться слзчай, когда лента 9 входит в соприкосновение с предметами обстановки, но тогда точка наблюдения находится на .границе видимой и невидимой зон обзорности. После вспьшпси электролампы 93, происшедп;ей от замыкания электроконтактов при надавливании конца указки 14 на точку наблюдения, например Б, снимают числовые показания устройства. Расстояние от глаз до точки наблйдения, например Б, считьтается в месте пересечения ленты 9 рулетки с внутренней кромкой торца корпуса 30 шкалы 10 измерения углов в вертикальной.плоскости. Однако в случае использования вставок 13 следует прибавить их длину с габаритами карабинов 97 и замыкающих колец 98. Деление шкалы 10 измерения углов в вертикальной плоскости, у которогр остановилась измерительная лента 9, указывает значение угла обзорное™ ти в вертикальной плоскости. Деление угловой шкалы 19 отсчета бинокулярного поля зрения, у которого остановилась верхняя . корпуса 30 шкалы 10 измерения углов в вертикальной плрскости, указьшает значение горизонтального угла обзорности. Расположение коромысла 11 (левое или правое) укажет, что параметры обзорности получены для левого или правого глаза оператора с испы туемого рабочего места. А местонахождение приспособления 8 для трассирования, указывает как удобнее смотреть на точку наблюдения с испытуемого рабочего места. Это неo6xoAHNfo для -анализа возможности работы на испытуемом рабочем месте и оценки удобства последнего. 23 Для измерения параметров во все диапазоне обзорности надавливают указкой на точку наблюдения Б (как описано вьппа) , например, левой рукой и, рттянув рукоятку 5j чтобы преодолеть действие пружины 82, проворачивают /правой рукой рукоятку 5 вокруг кругового 1Щферблата 43. При зтом хвостовик 60 вместе с головкой 3 под действием шатуна 59 благодаря креплению через палец 80 с коленом вала 44 вращения, будет подниматься и опускаться, а катушка 86 - описывать окружность вокруг центра вращения, находящего ся на геометрической оси вала 4, и соприкасаться в верхнем и нижнем положениях с основаниями рамок 69 и 70 в случае выхода головки 3 в границу автоматически установленного рамками 69 и 70 предела подъе ма главного луча зрения 71. Выполнение осей 64 из токоизоляционного материала обеспечивает злектроизоляцию рамок 69 и 70, но их соприкосновение с катушкой 86, элект роизолированной от стакана 78, вызовет замыкание электрической цепи на клемму источника 37 питания через провод 72, рамку 69 либо 70, вьтолненных из токопроводящего материала, на катушку 86 и по проводу 87 в контакт с электролампой 36, цоколь которой постоянно подключен проводом 35 ко второй клемме того же источника 37 питания. Поэтому электролаьта 36 загорится, указывая на нахождение точки наблюдения на границе допустимых пределов обзорности по высоте. Круговым вращением рукоятки 5 поднимают и опускают через шатун 59 головку 3, а вместе с ней и приспособление 8 для трассирования. Пружина 29 подтягивает через ленту 9 к точке наблюдения Б приспособление 8 для трассирования, что влечет за собой перемещение последнего по охватьгаакицим дорожкам 6 и 7. При этом коромысло 11, увлекаемое корпусом 30 шкалы 10 измерения углов в вертикальной пло кости. Двинет через вертикальньй конец 65 стержня дополнительные .ролики 63, которые через свои оси 64 сместят рамки 69 и 70, автомати чески указьшакхцие на шкале 73 новы 2 диапазоны максимального отклонения по высоте главного луча зрения 71 для новых положений приспособления 8 для трассирования. Загорание электролампы 36 при положении рукоятки 5 вьппе нулевой или ниже девятой отметки кругового циферблата 43, которые находятся на вертикальной прямой, условно оставленной в виде следа 58 фронтальной плоскости, проходящей через геометрическую ось вращения вала 44, указывает на смещение по высоте приспособления 8 для трассирования, превьщ1ающее допустимое. В этом случае требуется перестановка пальца 80 вдоль пазов 77 и 83 в направлении геометрической оси вращения вала 44, как описано вьш1е. Загорание электролампы 36 при по-: ложении рукоятки 5 только на нулевой И девятой отметках, т.е. в самом низу и верху кругового циферблата 43, указьшает на правильность настройки. Теперь,вращая рукоятку 5 в полном круговом цикле (что обеспечивает быстроту работ) вокруг кругового циферблата 43 одной рукой и держа указку 14 на точке наблюдения, например Б, другой (или помощником оператора), анализируют цифровые показания линейных и угловых параметров. Наименьшие значения этих параметров указывают наилучшие условия дпя обзорности на интересующую точку наблюдения с рабочего места и вместе с тем показывают наиболее удобные точки обзорности. Сопоставляя значения шкалы 42 высот и шкалы 73 диапазонов подъема головки, получают исходные данные к отысканию рабочей позы оператора в момент наилучшего обозрения интересукицей точки наблюдения с испытуемого рабочего места, г Малая ось эллипса участков 61 и 62 вертикальной беговой дорожки определяет максимальньй диапазон подъема головки 3, поэтому высота шкалы 42 выполняется равной длине упомянутой малой оси эллипса. В то же время высота регулировки подъема головки 3 в том же диапазоне коленчатого вала 44 вращения обеспечивается шкалой 73 диапазонов, равной половине малой оси того же эллипса. 25 Устройство позволяет найти линей ные и угловые параметры обзорности точек наблюдения, находящиеся практически на достаточно большем расстоянии от рабочего места. Для достижения этого пользуются неограниченным числом измерительных вставок 13к ленте 9 рулетки, последователь но соединяя их, например, карабинами 97 и замыкающими кольцами 98. Устройство может быть использова но при определении точек границы видимой и невидимой зон обзорности во всем диапазоне зрения как ниже, так и выше линии горизонта, например, через секторы окон кабины, очищаемые стеклоочистителями, а так же при выявлении выступающих точек, ухудшающих обзорность. При этом настройка выполняется так, как описано вьше, но концом стержня 89 указки 14 достигаются , до точек гра ницы сектора окон кабины, очищаемых стеклоочистителями, а при выявлении выступающих точек, ухудшающих обзорность, натянутую ленту 9 рулет ки или соединенные с ней вставки 13 доводят до соприкосновения с выступающими точками предметов обсгановки, заслоняющими обзорность, упираясь концом стержня 89 в поверхность например пола, потолка кабины, специально для этой цели установленного экрана и т.д. Точки, указанные концом указки 14на этих поверхностях, соединяют линией, которая представляет собой границу видимой и невидимой зон, а линейные и угловые параметры об- зорности этих точек показываются на тех же шкалах, что описаны. Точки обстановки, вошедшие в соприкосновение, с натя;нутой лентой 9 рулетки или со вставками 13, явля ются теми точками, ктторые ухудшают обзорность. Предлагаемым устройством можно определять и точки объектов зоны видимости при повороте только глаз либо только головы, или при повороте и головы и глаз. Для этого на корпусах 30 угловых шкал, например измерения углов в вертикальной плос кости, отыскивают лунки 31 у цифровых обозначений шкалы 10 предельных значений интересующих нас зон. Цифровые значения выбираются по таблицам (см. например, Энергономика. Ири 92 N26 ципы и рекомендации. М., 1974, № 5, с. 11, рис. 3. Зоны видимости в вертикальной и горизонтальной плоскостях) . В выбранных лунках 31 фиксируют ограничители 32. Устройство работает так же, но ограничители загораживают проход ленте 9 внутри корпуса 30 шкалы 10 измерения углов в вертикальной плоскости, придавая ленте 9 пропеллерность в случае, когда указка 14 отмечает точки наблюдения, находящиеся за контролируемыми пределами измерения. Это сигнализирует о том, что имитация линий взгляда нарушена и находится за пределами возможностей зрительной системы человека при обозрении объекта поворотом только глаз, ли- бо только головы, или при развороте и головы и глаз одновременно. Предлагаемое устройство может , быть использовано и для испытания рабочего места оператора при его положении стоя. Для этого достаточно , закрепив штатив 1 ремнями 2 на горизонтально расположенной подушке сиденья, дополнительно установленного на рабочем месте оператора, поднять стенки 38 и 39 так., чтобы стрелки 41 совместились с соответствующими делениями шкал 40 растоуказателя для уровня глаз при положении оператора стоя. Далее испытания проводят аналогично. Кроме .того, предлагаемое устройство может быть использовано при замерах параметров обзорности в случае неподвижного закрепления головы оператора. Для достижения этого отсоединяют провода 87 и 35 от электролампы 36 и хвостовик 60 от шатуна 59. Затем, вынув хвостовик 60 с головкой 3 из горловины 75 и освободив паз 22 перекладины коромысла 11 от верхнего вертикального конца 23 стержня, головку 3 выемкой 34 затылочной части закрепляют по месту на подушке сиденьяJ в зоне фиксации головы оператора, выставив с помощью универсальных средств, например спиртовым уровнем и зафиксировав струбцинами, ремнями и т.д. Замеры параметров обзорности получают по ленте 9 рулетки , вставки 13 и угловым шкапам 10 и 19. Полученные устройством числовые значения параметров обзорности поз воляют найти на обстановке рабочего места обмеренные точки наблюдения и выступающие точки, ухудшаюпщ обзорность. Для этого поднимают стенки 38 и 39 на уровень, достигнутьй при ранее проведенных замерах. Фиксируют рукоятку 5 в соответствующих отверстиях 45 кругового циферблата 43. Конец стержня 89 указки 14 соединяют через замьжающее кольцо 98 с карабином 97 ленты 9 рулетки (а при необходимости и со вставками 13), затем двигают его, держа за рукоятку 88, поперек шкалы 10 измерения углов в вертикальной плоскости, поворачи вая корпус 30 последней на угол, ранее полученный на угловой шкапе 19 отсчета бинокулярного поля зрения. Движением указки 14 вдоль шка лы 10 измерения углов в вертикальной плоскости устанавливают ленту 9 рулетки на угол, ранее полученны этой шкалой, и вытягивают ленту 9 из полости 24 приспособления 8 до пересечения цифрового обозначения ее мерных линейных делений, получе ного ранее, с внутренней кромкой торца корпуса 30 шкалы 10 измерени углов в вертикальной плоскости. В этом положении конец стержня 89 показывает ранее обмеренную точку наблюдения. Таким образом, предлагаемое уст ройство позволяет производить точные измерения параметров обзорности во всем диапазоне зрения для лю бого роста оператора при его работе как сидя так и стоя. Применение в народном хозяйстве указанного устройства по сравнению с прототипом снижает себестоимость изготовления в 2,4 раза. Только за счет этого годовой экономический эффект составляет 0,8 млн руб. Кроме того, предложенная конструкция более удобна и совершенна , так как: отсутствуют переналадки в процессе его использования в виде перестановки основания и сохраняется возможность замера параметров обзорности во всем диапазоне зрения как ниже, так и вьппе линии гория онта, наглядно для окружающих имитирует линии взгляда на достаточно больше 9228 расстоянии за счет выполнения трассирующего элемента в виде ленты рулетки и возможности ее соединения с неограниченным числом измерительных вставок, устраняется необходимость выполнения процесса определения расстояний от глаз до точек наблюдения, так как автоматически вьщаются значения линейных параметров одновременно с угловыми и исключается необходимость постоянного использования двух операторов и в большинстве случаев граничиваются одним специалист ом, за счет нанесения мерных линейных делений непосредственно на поверхности трассирующего элемента;, обеспечивается сигнализация момента завершения измерения обзорности замыканием электролампы на электробатарейку, вмонтированную в указку при упирании последней в точку наб-i людения. Кроме того, предлагаемое устройство позволяет быстро отыскивать наиболее удобные точки обзорности и получать исходные данные к отысканию позы оператора в момент наилучшего обозрения точки наблюдения за счет обеспечения вращения рукоятки штатива в полном круговом цикле для подъема и опускания головки в эргономически допустимом диапазоне J обеспечивает получение характеристики обзорности до максимальных значений зон видимости либо только от поворота глаз, либо от поворота головы, либо разворота головы и глаз одновременно за счет ввода огрАничителей, устанавливаемых в лунках на торцовых поверхностях корпуса угловых шкал, в местах границ угловых диапазонов, которые препятствуют проходу элементов устройства за пределы ограничения, когда указка отмечает точки наблюдения, находящиеся за контролируемыми пределами измерения; обеспечивает высокую степень точности подъема приспособления для трассирования на уровень главного луча зрения при свободном положении головы и возможность фиксирования головки устройства в положении, копирующем неподвижное положение головы оператора, так как стенки штатива поставлены на гайки, в кото29
рые ввинчены вертикальные регулировочные элементы, каждый развернутый виток резьбы которых представляет . собой наклонную плоскость и поэтому обеспечивается поворотом гаек плавный подъем по упомянутой наклонной плоскости стенок .с приспособлением для трассирования на любой задаваемый уровень, а затылочная часть основания голов.и снабжена выемкой с возможностью бесштативного ее закрепления на подушке сиденья по месту расположения головы оператора при помощи универсальных средств ремнями, струбцинами и т.д: позволяет использовать операторов меньшей квалификации, так как вклю12419230
ченные в механизм устройства рамки автоматически устанавливают диапазон максимального отклонения по вы.соте главного луча зрения в зависи5 мости от местонахождения точки наблюдения - сбоку, спереди или сзади; облегчает работу вводом сигнализации моментов нахождения точки наблюдения в границе допустимых, пре10 делов высоты подъема главного луча из точки обзорности, удобной для обозрения за счет самовключения электролампы через источник питания, например аккумуляторную батарею,
15 от контакта катушки стакана и рамок штатива, автоматически устанавливающими диапазон максимальных отклонений .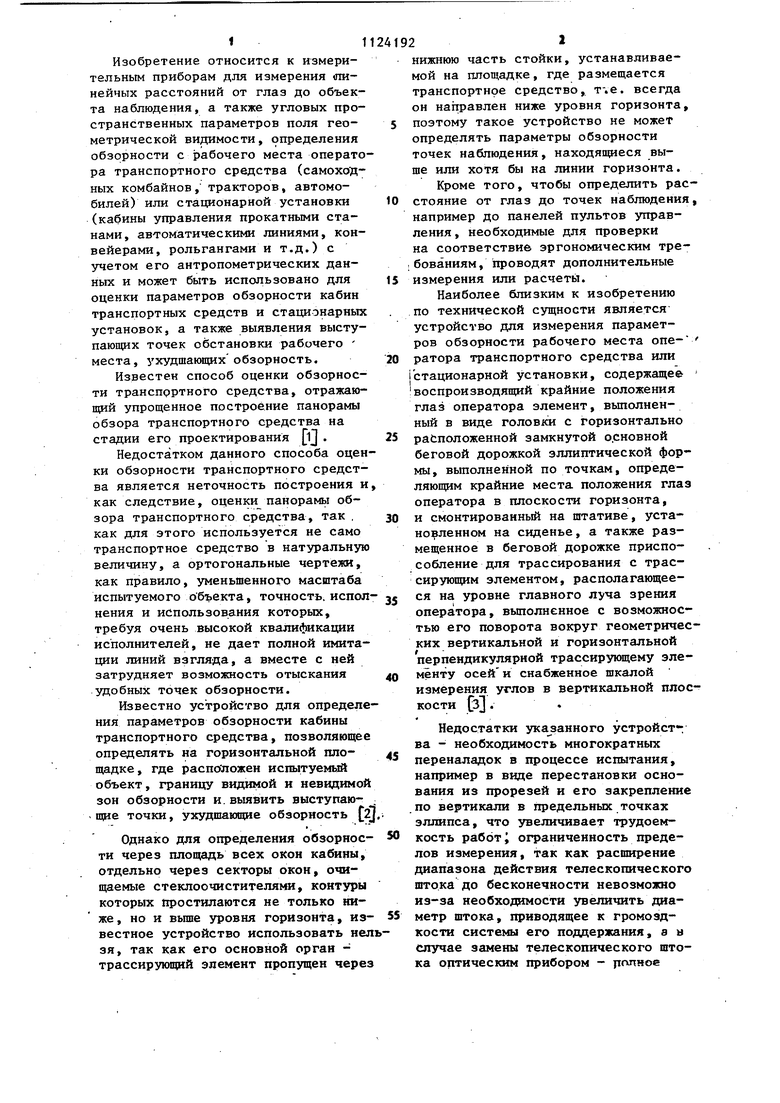

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения параметров обзорности кабины транспортного средства | 1980 |
|
SU926556A1 |
| Устройство для измерения параметров обзорности кабины транспортного средства | 1974 |
|
SU491069A1 |
| Устройство для определения параметров обзорности кабины транспортного средства | 1982 |
|
SU1105773A2 |
| Устройство для измерения параметров обзорности кабины | 1972 |
|
SU469907A1 |
| Устройство для определения и оценки обзорности через световой проем ветрового стекла транспортного средства | 1990 |
|
SU1721462A1 |
| Устройство для оценки обзорности автотранспортных средств | 1990 |
|
SU1721463A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОБЗОРНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2376565C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ РАЗМЕРОВ ОБЪЕКТОВ НАБЛЮДЕНИЯ | 2000 |
|
RU2164674C1 |
| Трехмерный посадочный манекен для транспортного средства | 1981 |
|
SU962783A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОБЗОРНОСТИ ОПЕРАТОРА ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2129261C1 |
11
Put.f
Фиг.З
A-A
5g cd
фиг,6
(pue.S
U
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ оценки обзорности транспортного средства | 1971 |
|
SU441466A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
