Изобретение относится к электротехнике и может быть использовано для повышения быстродействия и надежности многодвигательного электропривода с упругими элементами, связывающими электродвигатели между собой и с исполнительным механизмом, например, в горной Промышленности для струговых установок.
Известен способ управления, по которому формируют Зсщание на нагрузку и скорость, измеряют нагрузку и скорость, определяют производную задающего сигнала и по результатам измерения формируют управляющее напряжение 1 .
Наиболее близким к изобретению является способ управления электроме санической системой, включающей электродвигатели и исполнительный орган, связанные между собой упругими элементами, по которому формируют задание на нагрузку электродвигателей, измеряют нагрузку электродвигателей, сравнивгиот ее с заданной и по результаТс1М сравнения формируют управляющее напряжение на электродвигатели f2.
Недостатками известных способов являются низкие быстродействия и
надежность, вызванные возможностью колебаний в электромеханической системе, что приводит к ухудшению динамики привода и неисправности механических элементов.
Целью изобретения является повышение надежнорти и быстродействия.
Поставленная цель достигается тем, что согласно способу дополнительно
10 формируют задание на скорость исполнительного органа, измеряют скорость исполнительного органа, сравнивают заданную и измеренную скорости и по результатам сравнения формируют зада15ние на деформацию упругого элемента, связывающего исполнительный орган с первЕлм электродвигателем, измеряют деформацию этого упругого элемента, сравнивают измеренную деформацию
2 с заданной .и формирование задания на нагрузк5 первого электродвигател я производят по результатам сравнения указанных величин, формируют задание на деформацию упругого эле25мента, связывающего первый электродвигатель со вторым, по величине задания на нагрузку первого электродвигателя, измеряют деформацию упругого элемента, связывающего первый
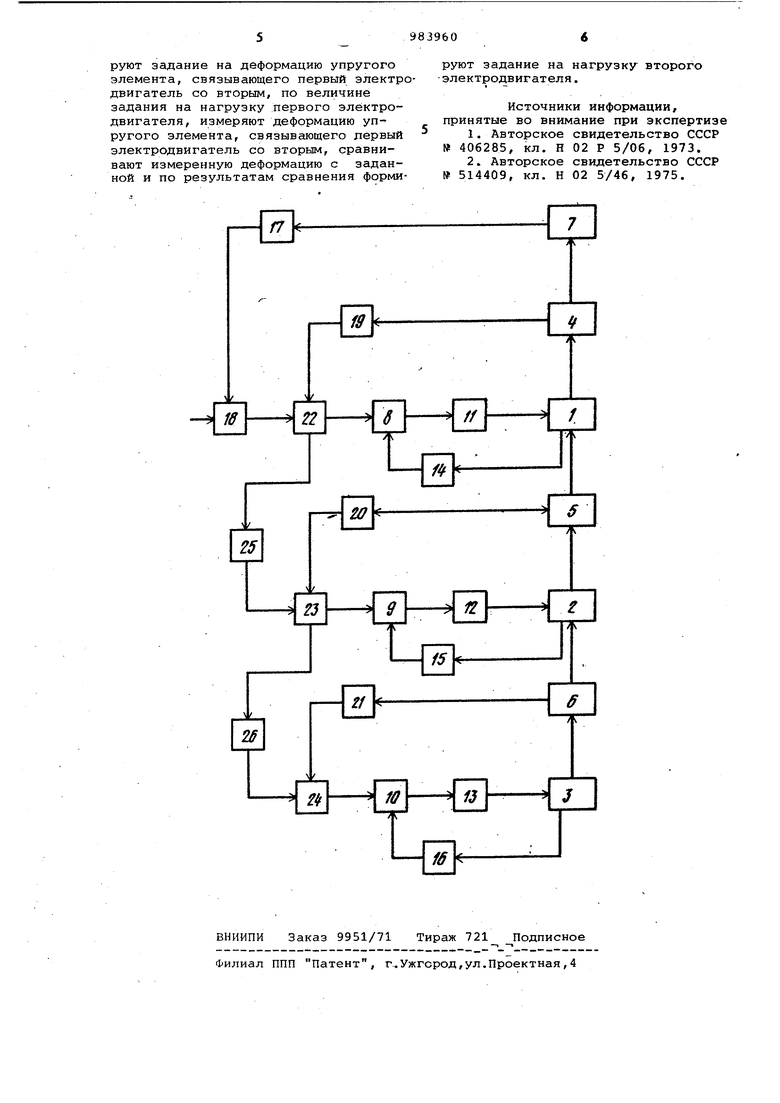
30 электродвигатель со вторым, с авнивают измеренную деформацию с зада ной .и по результатам сравнения формируют задание на нагрузкувторого электродвигателя. На чертеже приведена схема устройства, реализующего предлагаемый способ. Электропривод содержит электродв гатели 1,2 и 3 механически связанны через упругие элементы 4,5 и б между собой и с исполнительным органом 7, регуляторы 8, 9 и 10 тока каждог электродвигателя, подключенные к со ответствующим электродвигателям через преобразователи 11-13, датчики 14, 15 и 16 тока электродвигателей 2 и 3 соответственно, датчик 17 ско рости, выход которого подключен к общему регулятору 18 скорости, три датчика 19, 20 и 21 деформации упру гих элементов 4,5 и 6 соответственно регуляторы 22, 23 и 24 деформдции, корректирующие звенья 25 и 26, выхо регулятора 18 скорости подключен к первому входу первого регулятора 22 деформации, первый выход каждого ре гулятора 22, 23 или 24 деформации подключен к соответствующему регулятору 8, 9 или 10 тока, второй выход регуляторов 22 и 23 деформации подключен через корректирующее звено 25 или 26 соответственно к перво му входу регуляторов 23 и 24 деформации. Каждый датчик 19, 20 и 21 подключен к второму входу регулятора 22, 23 и 24 деформации соответст венно. Устройство работает следующим об разом. Сигнал задания на величину скорости исполнительного органа 7 поступает на регулятор 18 скорости, где сравнивается с сигналом, пропорциональным измеренной датчиком 1 скорости исполнительного органа 7. По величине рассогласования этих двух сигналов на выходе регулятора 18 скорости формируется сигнал задания на величину деформации в упру гом элементе 4, связывающем исполнительный орган 7 и ближайший к нем электродвигатель 1. Этот сигнал пос пает на регулятор 22 деформации, где сравнивается с сигналом, пропор циональным измеренной датчиком 19 деформации в упругом элементе 4. По величине рассогласования формируется сигнал задания на величину тока электродвигателя 1, поступающий с выхода регулятора 22,деформации на вход регулятора 8 тока, где он сравнивается с сигналом, пропорциональным измеренному датчи ком 14 току электродвигателя 1. Вы ходной сигнал регулятора 22 поступает на вход корректирующего звена 25, преобразующего этот сигнал в сигнал задания на величину деформь. ции в упругом элементе 5,связывающем между собой электродвигатели 1 и 2 . Коррекция сигнала осуществляется по скорости изменения деформации в упругом элементе 5, связывющим предыдущий, считая от исполнительного органа 7 электродвигатель 1 с последующим электродвигателем 2. При этом сигнал задания на величину тока электродвигателя 2 формируется по величине рассогласования скорректированного сигнала и сигнала, пропорционального измеренному датчиком 15 току электродвигателя 2. Далее формируется сигнал задания на величину тока электродвигателя 3, связанного с предыдущим электродвигателем 2 упругим элементом 6. При этом выходной сигнал регулятора 23 деформации поступает через корректирующее звено 26, осуществляющее коррекцию по скорости изменения деформации в упругом элементе 6, на вход регулятора. 24 деформации, где сравнивается с сигналом, пропорциональным величине деформации в упругом элементе 6 и поступающим с датчика деформации 21. Предлагаемый способ позволяет повысить быстродействие за -счет поддержания максимально допустимых нагрузок в механическом оборудовании при одновременном исключении колебаний в электромеханической системе с упругими элементами, что повьпыает надежность. Формула изобретения Способ управления электромеханической системой, включающей электродвигатели и исполнительный орган, связанные между собой упругими элементами, по которому формируют задание на нагрузку электродвигателей, измеряют нагрузку электродвигателей, сравнивают ее сзаданной и по результатам сравнения формируют управляющее напряжение на электродвигатели, отличающийся тем, что, с целью повышения надежности и быстродействия, формируют задание на скорость исполнительного органа, измеряют скорость исполнительного органа, сравнивают заданную и измеренную скорости и по результатам сравнения формируют задание на деформацию упругого элемента, связывающего исполнительный орган с первым двигателем, измеряют деформацию этого упругого элемента, сравнивают измеренную деформацию с заданной и формирование задания на нагрузку первого электродвигателя производят по результатам сравнения указанных величин, формируют задание на деформацию упругого элемента, связывающего первый электродвигатель со вторым, по величине задания на нагрузку первого электродвигателя, измеряют деформацию уп ругого элемента, связывающего лервый электродвигатель со вторым, сравнивают измеренную деформацию с заданной и по результатам сравнения формируют задание на нагрузку- второго электродвигателя.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 406285, кл. Н 02 Р 5/06, 1973.
2.Авторское свидетельство СССР № 514409, кл. Н 02 5/46, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| Способ автоматического управления многодвигательным электроприводом технологического пресса | 1983 |
|
SU1119153A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОПЕРЕДАЧИ ТЕПЛОВОЗОВ | 2011 |
|
RU2476332C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576594C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2011 |
|
RU2454335C1 |
| Способ регулирования электрической передачи тепловоза | 2020 |
|
RU2729865C1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| РЕГУЛЯТОР ЛИНЕЙНОЙ ПЛОТНОСТИ ВОЛОКНИСТОГО ПРОДУКТА | 1991 |
|
RU2038437C1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ГАРМОНИЧЕСКИМ МОМЕНТОМ НАГРУЗКИ В ШИРОКОМ ДИАПАЗОНЕ СКОРОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2761780C1 |
