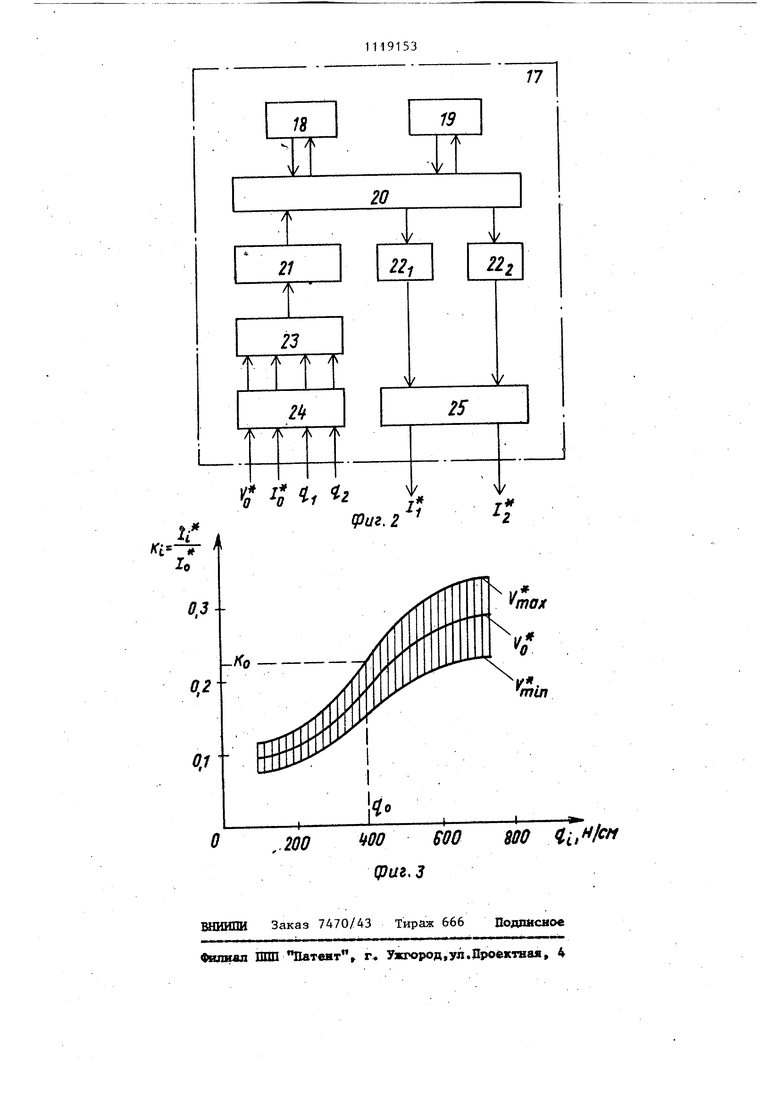
Изобретение относится к электротехнике и предназначено для использования в многодвигательных взаимосвязанных электроприводах постоянного тока с общим тиристорным преобразователем нeIIpepывньD aгpeгaтoв в частности технологических прессов бумаго- и картоноделательных машин. Известен способ автоматического управления многодвигательным электроприводом постоянного тока бумагоделательной машины, согласно которому скоростью управляют путем изменения напряжения общего тиристорнегр преобразователя, а соотношением скоростей отдельных двигателей и отработкой возмущающих воздействий - с помощью изменения потоков возбуждения . Однако известный способ не всегда обеспечивает заданное распределение нагрузок двигателей в статике и динамике. Наиболее близким к изобретению по технической сущности и достигаемому результату является способ автоматического управления многодвигательным электроприводом технологи ческого пресса, согласно которому задают величину уставки скорости вращения электродвигателя основного вала, измеряют его .скорость вращени сравнивают указанные величины и фор мируют ток задания для регулятора полного тока, измеряют полный ток якорей электродвигателей основного И вспомогательных валов, сравнивают его с током задания и формируют управляющее воздействие для регулирования нагрузки всех электродвигателей, формируют в зависимости от полного тока задания величину корректирующих воздействий для регуляторов якорных токов электродвигателей вспомогательных валов, измеряют якорные токи этих электродвигателей по результату сравнения полученных величин формируют задания на регуляторы токов возбуждения электродвигателей вспомогательных валов, измеряют токи возбуждения этих двигателей, сравнивают ихс соответствующими заданньми значениями и формируют -управляющие воздействия .для регулирования токов возбуждения электродвигателей -вспомогательных валов 2J . Однако при использовании известного способа корректирующие воздей32ствия для регуляторов токов якорей электродвигателей вспомогательных валов, сформированные с учетом тока задания для регулятора полного тока, обеспечивают линейную зависимость распределения нагрузки двигателей К от .удельного давления (- валов пресса, причем установка соотношения нагрузок осуществляется вручную, а распределение нагрузок в функции скорости Vg электродвигателя основного вала и давления между валами, которые могут меняться в процессе ра- боты машины, не предусматривается, что приводит к появлению передаваемого через сукно уравнительного момента между валами, вызьгоающего преждевременный износ сукна бумагоделательных машин, а также снижение качества вырабатываемой продукции. Цель изобретения - увеличение срока службы оборудования при одновременном повьшении качества вырабатываемой продукции путем автоматического распределения нагрузок между электродвигателями основного и вспомогательных валов. Указанная цель достигается тем, сто согласно способу автоматического управления многодвигательным электроприводом технологического пресса дополнительно измеряют величину удельного давления между валами технологического пресса и указанные корректирующие воздействия определяют по формуле )- S / maxlv r, т где J. - корректирующее воздей ствие для регулятора тока электродвигателя 1-го вспомогательного вала; IQ - ток задания для регулятора полного тока; - измеренное значение величины удельного давления I -го вспомогательнод го вала; тох .о максимальная (константа) и фактически заданная уставка скорости вращения электродвигателя основного вала; k(j,. - константы. На фиг. 1 представлена функциональная схема устройства, реализующего предлагаемый способ; на фиг, 2 - схема блока формирования корректирующих воздействий; на фиг. требуемые зависимости 1 /I i( ,у Технологический пресс 1 (фиг. 1) состоит из основного 2(j и вспомогательных 2,-2 валов, а также сукна между которыми пропускается обрабатываемый продукт 4 (бумага или картон) , Все валы вращаются с одинаковой скоростью, что обеспечивается наличием механических связей в системе вал - сукно. Вращение валов и распределение нагрузок в системе вал - сукно обеспечивает устройство 5 автоматического управления, содержащее системы регулирования электродвигателей основного и вспомогательных валов (на фиг. 1 системы управления показаны для вспомогательньпс валов 2 и 22) в составе общего регулятора: 6 скорости вращения, регулятора 7(5 полного тока и регуляторов и 72 якорных токов электродвигателей вспомогательных валов, общего тиристорного преобразователя 8. датчика 9р полного тока, датчико 9i и 9,, токов якорей электродвигателей вспомогательных валов, электродвигатель 10д основного и электро двигатели 10 и lOjp вспомогательных валов, датчик 11 скорости вращения электродвигателя основного вала и системы регулирования потоков возбуждения электродвигателей вспомогательных валов в составе регуляторов 12 и 12г токов возбуждения, тиристорных преобразователей 13 и 13 датчиков 14 и 142 токов возбуждения и обмоток 15, и 15J возбуждения Устройство дополнительно снабжено датчиками 16 и IGj давления валов, выходами связанными с первыми входами блоков 17 и 17 формирования корректируклдих воздействий, вторые входы которых соединены с выходом общего регулятора 6 скорости вращения двигателя основного вала, треть входы соединены с задающим входом этого регулятора, а выходы подключены к первым входам регуляторов 7 /и 7„ токов якорей электродвигателей .вспомогательных валов. В качестве датчиков 16 и 16 да ления валов могут быть использованы пресс-дукторные датчики типа МИН-01. Блоки 17 и 172 формирования корректирующих воздействий (фиг. 2) выполнены одинаковыми и содержат процессор 18, оперативньй запоминающий блок 19, общую шину 20, аналого-цифровой преобразователь 21, цифроаналоговый преобразователи 22| и 22„, коммутатор 23, блоки 24 и 25 гальванических развязок, причем процессор 18 и оперативный запоминающий блок 19 через общую шину 20 , аналого-цифровой преобразователь 21, коммутатор 23 и блок 24 гальванических развязок связаны с выходами датчиков 16 и 162 давления валов, задающим входом и выходом общего регулятора 6 скорости вращения и через общую шину 20, цифроаналоговые преобразователи 22 и 22 и блок 25 гальванических развязок с первыми входами регуляторов 7 и 72 якорных токов. Блоки 17,| и 172 формирования корректирующих в,оздействий обеспечивают прием уставки скорости вращения электродвигателя основного вала, тока задания для регулятора полного тока, сигналов датчиков давления валов и последующее формирование и выдачу корректирующих воздействий для электроприводов вспомогательных валов. Эти блоки могут быть реализованы на микроЭВМ. Сущность способа заключается в том, что в процессе автоматического управления многодвигательным электроприводом технологического пресса 1 с общим тиристорным преобразователем 8, общим peгyлятo)oм 6 скорости вращения и регуляторами 12 и 122 токов возбуждения электродвигателей вспомогательных валов задают величину уставки VQ скорости вращения электродвигателя основного вала, измеряют его фактическую скорость вращения,и полный ток, формируют задание 1 для регулятора 7д полного тока и устанавливают со отношение якорных токов электродвигателей 100-102 основного 2 и вспомогательных 2, и 2„ валов путем воздействия на регуляторы 7 , и 72 токов якорей электродвигателей 10 и lOj вспомогательных валов 2, и 2,, для чего измеряют удельное давление f и ( J между валами, формируют задание I, и 1.для регуляторов токов 7, и и 72 в функции удельного
давления между валами пресса и скорости электродвигателя основного вала в соответствии с формулой
r i:tV«.)D glCxivM-
.в результате этого происходит тре буемое по технологическим условиям перераспределение нагрузок между приводами основного 2 и вспомогательных 2 и 2 валов технологического fipecca 1.
Устройство, реализующее предлагаемый способ, работает следующим образом.
До начала работы в общий регуля- тор 6 скорости вращения и в блоки 17 и 177 формирования корректирующих воздействий задают величину уставки скорости VQ. В процессе работы в регулятор 70 полного тока и в блоки 17j, и -172 формирования корректирующих воздействий поступает задаваемое значение тока 1 , формируемое общим регулятором 6 скорости вращения на основе заданного значения VQ с учетом корректирующего воздействия, формируемого по результатам измерения датчиком 11 скорости вращения двигателя Юр основного вала. С выхода регулятора 7д полного тока на вход общего тиристорного преобразователя 8 поступает управляющее воздействие, формируемое на основе заданного полного вала С учетом сигнапа обратной связи по полному току, измеряемому датчиком 9д. Управляющий сигнал с выхода общего тиристорного преобразователя 8 непосредственно воздействует на электродвигатель основного вала, вызывая его вращение с заданной скоростью.
Выходные сигналы блоков 17 и 17g формирования корректирующих воздействий, определенные в соответствии с зависимостью
Io V«-t4 r o)(v ;av/VM
поступают на первые входы регуляторов 7 и 7rt токов якорей электродвигателей вспомогательных валов, сигналы с выходов регуляторов 7 и 7j, ,
сформированные с учетом действия обратных связей по токам, измеренным датчиками 9 и 9j, поступают на входы регуляторов 12 и 12 токов возбуждения, управляющие сигналы с выходов которых, сформированные с учетом обратных связей,по токам, измеренным датчиками 14 и 14п, поступают на входы тйристорных преобразо0 вателей 3 к ISg, сигналы с выходов которых воздействуют на обмотки 15. и 150 возбуждения.
Формирование значений I, и 1„ с помощью блока 17, (172) осуществляет5 ,ся следующим образом.
Аналоговые значения V , , q и а. через блок 24 гальванических развязок и коммутатор 23 поступают в аналого-цифровой преобразователь 21, из
0 которого в цифровом виде через общую шину 20 поступают в процессор 18 и запоминаются в оперативном запоминающем блоке 19, в котором хранятся программы, реализующие функционапьную зависимость
iri:K a- Hrao),,/VoMl
ЗначениеV gjj хранится в оперативном запоминающем блоке 19 как константа.
Затем с выхода оперативного запоминающего блока 19 через общую шину 20, цифроаналоговые преобразователи 222 блок 25 гальванических развязок значения I, и Ig поступают на первые входы регуляторов 7;, и 7 якорных токов, сигналы с выхода которых через регуляторы 12 и 12,j тока возбуждения и тиристорные преобразователи 13, и 132 воздействуют на обмотки 15 и 15 возбуждения, что приводит к требуемому перераспределению нагрузок электродвигателей 10 и 10л.
fi
Таким образом, благодаря отсутствию уравнительных моментов между валами пресса при изменении его скорости и давления прессования, увеличивается срок службы пресса на 20-25% и устраняются нежелательные деформации бумажного полотна в зоне прижима валков.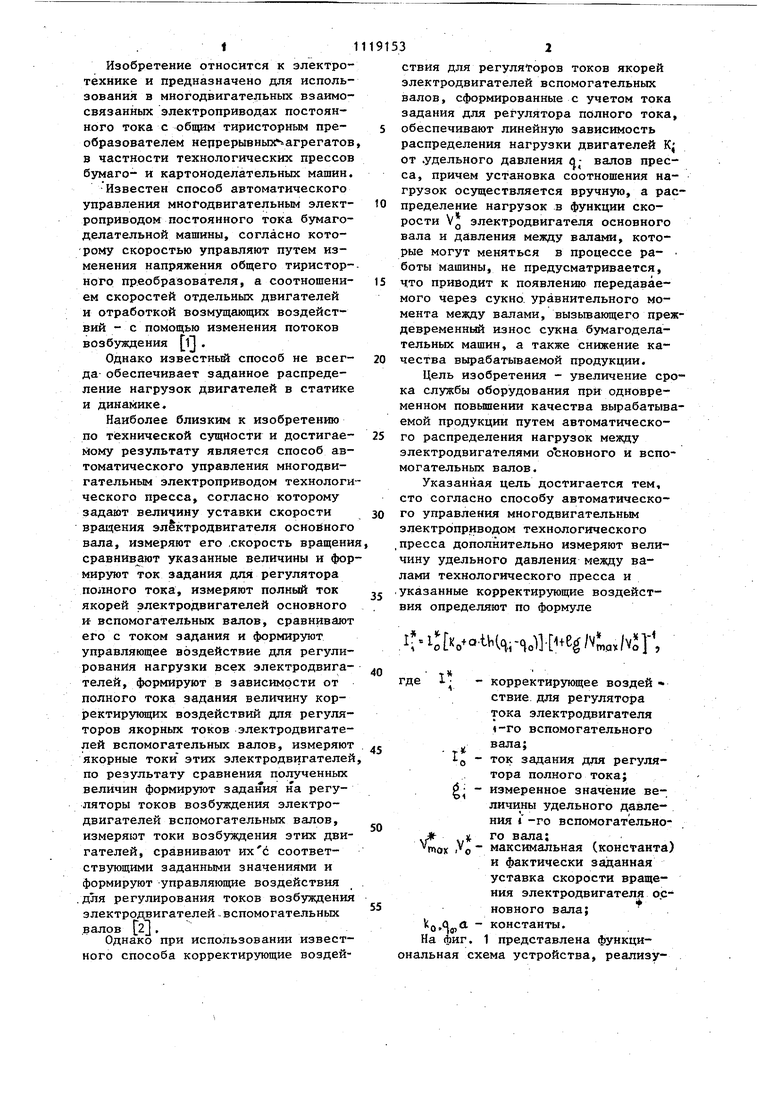
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического распределения нагрузок в многодвигательном электроприводе технологического пресса | 1980 |
|
SU972645A1 |
| Многодвигательный электропривод технологического пресса | 1987 |
|
SU1520645A1 |
| Двухдвигательный электропривод постоянного тока | 1981 |
|
SU978307A1 |
| Многодвигательный электропривод | 1991 |
|
SU1774457A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2013 |
|
RU2520837C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1996 |
|
RU2095931C1 |
| Многодвигательный электропривод агрегата непрерывной обработки полосы материала | 1986 |
|
SU1374394A1 |
| Многодвигательный электропривод | 1990 |
|
SU1818676A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1985 |
|
SU1301757A2 |
| СПОСОБ УПРАВЛЕНИЯ ПОТОКОМ ВОЗБУЖДЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2011 |
|
RU2456741C1 |
СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МНОГОЛВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ ТЕХНОЛОГИЧЕСКОГО ПРЕССА, при котором задают величину уставки скорости вращения электродвигателя основного вала, измеряют его скорость вращения, сравнивают указанные величины и формируют ток задания для. регулятора полного тока, измеряют полный ток якорей электродвигателей основного и вспомогательных валов технологического пресса,, сравнивают его с током задания и формируют управляющее воздействие, для регулирования нагрузки всех электродвигателей, формируют в зависимости от полного тока задания величину корректирующих воздействий для регуляторов якорных токов электродвигателей вспомогательных валов, измеряют якорные токи этих электродвигателей, по, результату сравнения полученных величин формируют задания на регулято-/ ры токов возбуждения электродвигателей вспомогатёльньгх валов, измеряют токи возбуждения этих двигателей, сравнивают их с соответствующими заданными значениями и формируют управляющие воздействия для регулирования токов возбуждения электродвигателей вспомогательных валов, отличающийся тем, что, с целью увеличения срока службы оборудования при одновременном повьппении качества вырабатьтаемой продукции путем автоматического распределения нагрузок между электродвигателями основного и вспомогательного валов, дополнительно измеряют величину удельного давления между ва(Л лами технологического пресса и ука занные корректирующие воздействия .определяют по формуле ;ioivQ-tb((rHo) e(,x/Vo)T I корректирующее воздейгде л ствие для регулятора . тока электродвигателя со ел I-го вспомогательного вала; 1ток задания для регуля00 тора полного тока; Q - измеренное значение ве. дичины удельного давления i-го вспомогательного вала; iVp - максимальная (констан max та) и фактически заданная уставка скорости вращения электродвигателя основного вала; 1(д,,а - константы.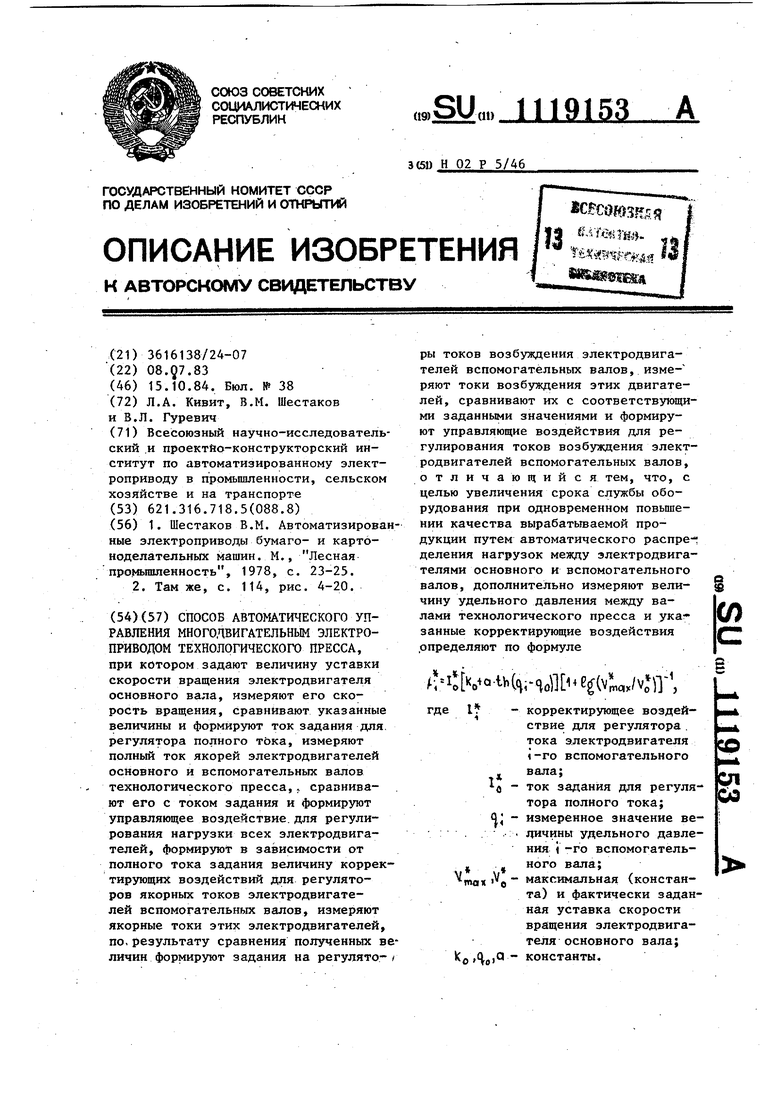
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шестаков В.М | |||
| Автоматизированные электроприводы бумаго- и картоноделательных йашин | |||
| М., Лесная промьгашенность, 1978, с | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
