(54) ОПТИКОиТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПЕРИОДИЧЕСКОЙ ГО1АНАРНОЙ СТРУКТУРЫ
1
Изобрегение относится к приборостроению, конкретно к контрольной aппa ратуре оценки качества изделий по пара- метрам визуальных полей, и предназначен но для автоматического контроля пери1 дических ппанарных структур больших интегральных схем (БИС), но может также применяться и для контроля дру гих планарных деталей, имеющих перио дичесЕсив элементы.
Известно -устройство для контроля периодических структур, содержашее оптико-электронный процессор (микроскоп, фильтрующие пкузал, оптоэлектронный преобразователь, электронный преобразо ватель), к выходу которого) подключен анализатор дефектности, а также блок (Регистрации (обычно монитор, перфора .тор, реже дополнительно устанавливается, индикаторное табло) lj.
Перемещение подложки с контропируёмыми модулями БИС осуществляется : блоком перемещения, управляемым блокам управления, по определенней программе
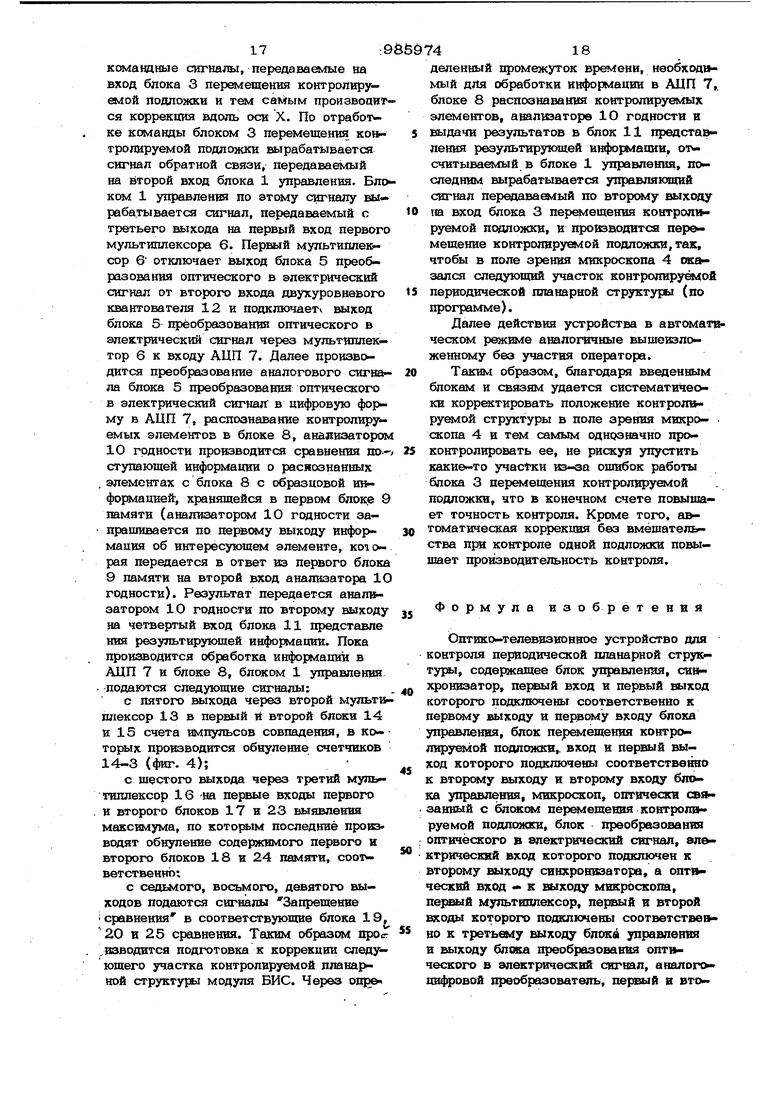
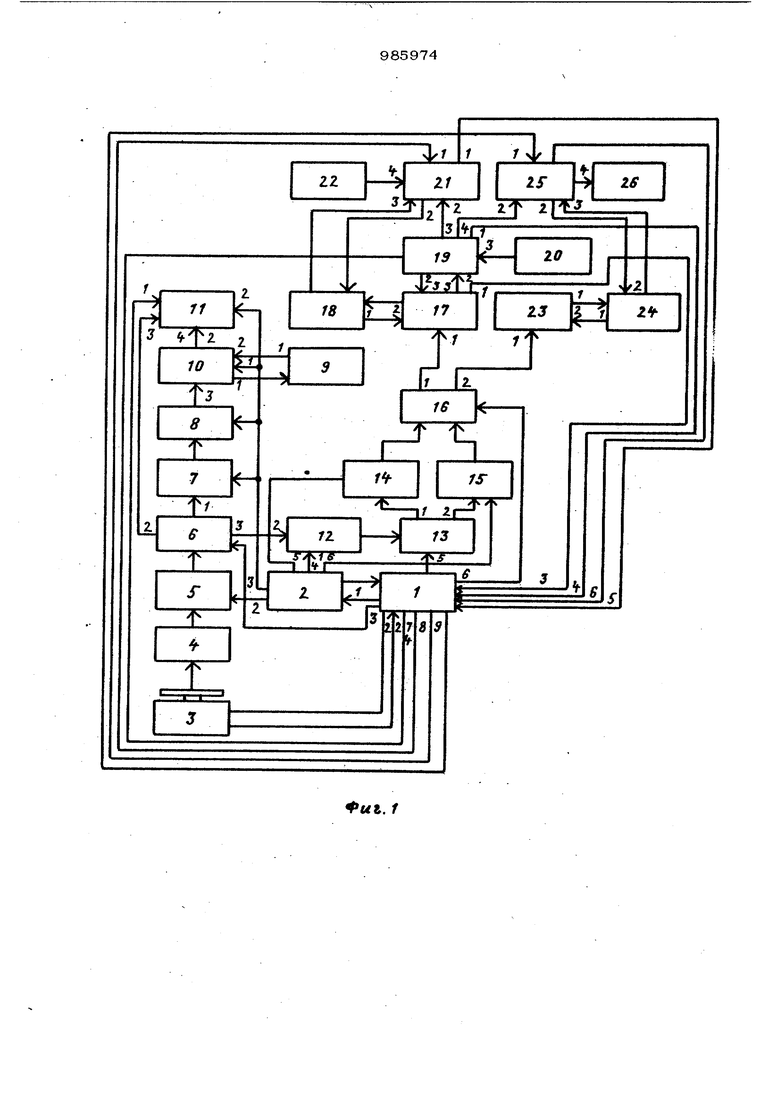
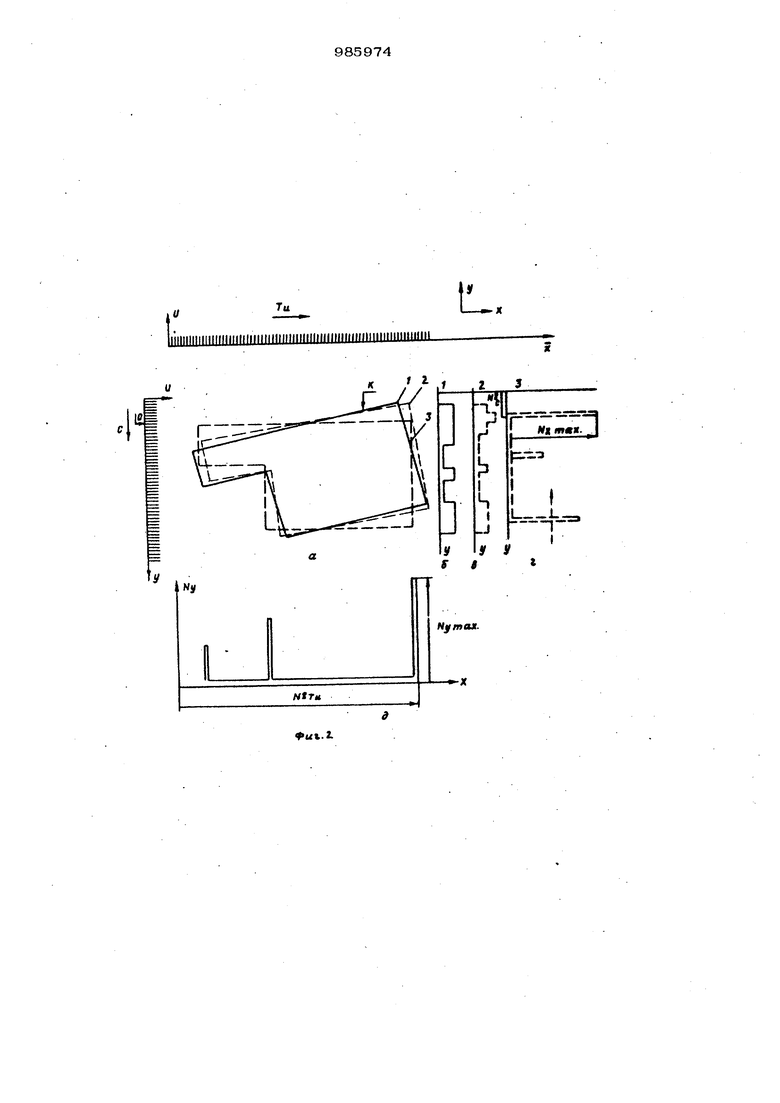
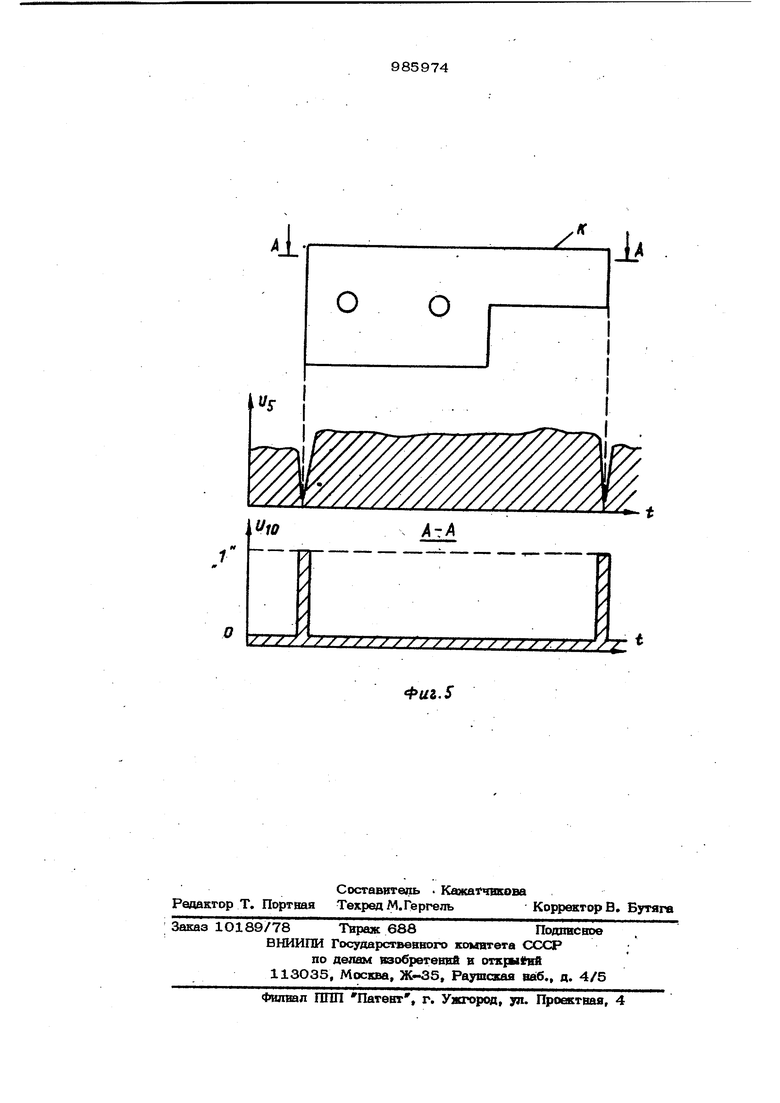
В полуавтоматическом режиме, т.е. через определенное количество шагов, сделаЕ i Goux автоматически, производится KOppeioквя оператором, через пульт управления блока управления положения подложки с контролируемыми модуттяии БИС ввиду систе« атически накапливаемой ошибвлс шага блока перемещения, так как через опредвпенвое количество шеигов блока перемещения ошибка шага, свойственная каждому блоку перемещения, становится соизмеримой с размерами KOHTpKMiHpyei мых аламеитов периодической структуры модней БИС (некоторые елементы, например, просто ве попадают в поле конт роля), что снижает производительность контроля. Кроме того, перекос положения контролируемой структуры из-за ошибок шага блока перемещения и неточности установки подложки на предметном стоп|и ке блока перемещения значительно затрудвяет авалвз дефектности, что снижает точность контролируюпюй аппаратуры, так как требуется дополнительное устройство сопоставления анализируемого взображ&ния с базовыми координатами, к которым привязана информация об образцовой стру туре (чаше всего содержащаяся в блоке памяти). Известно также устройство для контроля, содержащее синхронизатор, блок управления, блок перемещения контрол руемвй подложки, вход и выход которого подключены соответственно к блоку управления, оптико-электронный процессор, к выходу которого подключен а нализатор дефектности, а результат представляется в блоке представления результирующей информации (монитор, пшдущая мащинка, перфоратор). В этом устройстве с целью снижения влияния перекоса подложки с контролируемыми модулями БИС в качестве образцовой структуры используется изображение соседнего модуля -, , БИС С 2. Недостатком этого устройства являет ся то, что если имеют место одинаковые дефекты у двух соседних модулей БИС, Ео они не обнаруживаются, что снижает точность контроля. Производительность контроля снкжается из-за необходимости периодической ручной коррекции положения подложки, так как в противном случае модули БИС не будут полностью попадать в поле контроля по указанным выше причинам. Наиболее близким по технической сущности и достигаемому эффекту к пред лагаемому является оптико-телевизионное устройство для контроля периодической шшнарпой структуры, содержащее блок управления, синхронизатор, первый вход и выход которого подключены соответственно к первому выходу и первому входу блока управления, блок |перемешет1я контролируемой подложки, вход и первый выход которого пошшючены соответственно к второму выходу и второму входу блока управления, микроскоп, оптически связанный с блоком перемещения контролируемой подложки, блок преобразования оптического в электрический сигнал, электрический вход которого подключен к второму выходу синхронизатора, а оптический выход - к выходу микроскопа, мультиплексор, первый и второй входы которого подключены соответственно к третьему выходу блока управления и выходу блока преобразова- .ния оптического в электрический сигнал .последовательно расположенные аналогоцифровой преобразователь (АЦП), блок распознавания контролируемых элементов блок приведения контролируемой к образцовой информации, анализатор годности и блок представления результирующей информации (монитор, блок печати), причем вторые входы этих блоков подключены к третьему выходу синхронизатора, третий вход и второй выход анализатора годНости подключен соответственно к выходу и входу первого блока памяти, к блоку представления результирующей информации также подключены четвертый выход блока управления, второй выход мультиплексора. Коррекция положения контролируемой структуры модуля БИС осуществляется оператором с пульта блока управления через блок перемещения контролируемой подложки по изображению на мониторе блока представления результирующей информации, получаемому с помощью микроскопа и блока преобразования оптического в электрический сигнал. Затем по управляющему сигналу блока управления электрический сигнал блока преобразования оптического в электрический сигнал мультиплексором передается в АЦП, где преобразуется в цифровую информацию, -обрабатываемую бло- . ком распознавания контролируемых элементов, блоком приведения контролируемой к образцовой информации, анализатором годности. Результат анализа представляется в блоке представления результирующей информации ГЗ. В данном устройстве ввиду системат№чески на1шпливаемой ощибки шага блока перемещения контролируемой подложки требуется периодическое вмещательство оператора с целью коррекции положения контролируемой структуры модуля БИС подложки, что снижает производительность контроля. Кроме того, перекос в результате ощибок работы блока пер&мещения и даже неточность установки контролируемой структуры модуля БИС приводит к снижению точности контроля, а отдельные элементы структуры могут просто выйти из поля зрения, а следоватейьно, данное устройство требует сиень точной работы оператора по введению коррекции установки, что также снижает производительность контроля. Цель изобретения - повышение точное ти. Поставленная цель достигается тем, что в оптико-телевизионное устройство, содержащее блок управления, синхрош1аатор, первый вход и первый выход которого подключены соответственна к первоу выходу и первому входу блока упра: лекия, блок перемещения контролируемой подложки, вход и первый выход которого подключены соответственно к второму выходу и второму входу блока управления, микроскоп, оптически связанный с блоком перемещения контролируемой под ложки, блок преобразования оптического в электрический сигнал, электрический вход которого подключен к второму вых1 ду синхронизатора, а оптический вход- к выходу микроскопа, первый мультиплексор, первый и второй входы которого подключены соответственно к третьему выходу блока управления и выходу блока преобразования оптического в элек трический сигнал, аналого-цифровой преобразователь, первый и второй входы которого подключены соответственно к третьему выходу синхронизатора и первому выходу первого мультиплексора, блок распознавания контролируемых элементов, первый и второй входы которого подключень соответственно к третьему выходу синхронизатора и выходу аналого цифрового преобразователя, первый блок памяти, анализатор годности, первый и второй входы которого подключены соответственно к третьему выходу синхрони затора и выходу первого блока памяти, а первый выход которого подключен к входу первого блока памяти, блок представления результирующей информации, первый, второй, третий и четвертый входы которого подключены соответственно к четвертому выходу блока управления, третьему выходу синхронизатора, второму выходу первого мультиплексора и вто рому выходу анализатора годности, введе ны двухуровневый квантователь, первый И второй входы которого подключены соответственно к четвертому выходу синхронизатора и третьему выходу первого мультиплексора, второй мультиплексор, первый и второй входы которого подклк чены сбответственно к пятому выходу блока управления и выходу двухуровневого квантователя, первый блок счета импульсов совпадения, первый и второй входы которого подключены соответствен но к пятому выходу синхронизатора и первому выходу второго мультиплексора, второй блок счета импульсов совпадения первый и второй входы которого подключены соответственно к шестому выходу синхронизатора и второму выходу второго мультиплексора, третий мультиплексор, первый, второй и третий входы коiTopoix подключены соответственно к шео тому выходу блока управления, выходу первого блока счета импульсов совпадения и выходу второго блока счета импульсов совпадения, первый блок выявления максимума, первый вход которого подключен к первому выходу, третьего мультипиексора, а первый выход которого подключен к третьему входу блока управления, второй блок памяти, первый вход и первый выход которого подключены соответственно к второму выходу и второму входу первого блока явления максимума, первый блок сравнения, первый и второй входы которого подключе-. ны соответственно к сеаъысыу выходу блока управления и третьему выходу , первого блока выявления максимума, а первый и второй выходы которого подключены соответственно к четвертому входу блока управления и третьему входу первого блока выявления максимума, первый блок уставок, выход которого подключен к третьетлу входу первого блока сравнения, второй блок сравнения, первый, второй и третий входы которого подключены соответственно к восьмому выходу блока управления, третьему выходу первого блока сравнения, второму выходу второго блока памяти, а первый и второй выходы которого подключены соответственно к пятому входу блока yifrравления и второму входу второго блока памяти, второй блок уставок, выход которого подключен к четвертому входу второго блока сравнения, второй блок выявления максимума, первый вход которого подключен к второму выходу третьего мультиплексора, третий .блок памяти, первый вход и первый выход которого подключены соответственно к первому выходу и второму входу второго &1ока выявления максимума, третий блок сравнен:ия, первый, второй и третий входы которого подключены соответственно к девятому выходу блока управления, четвертому выходу первого блока сравнинкя, второму выходу третьего блока . памяти, а первый и второй выходы .торого подключены соответственно к щестрму входу блока управления и втсм рому входу третьего блока памяти, тр&тий блок уставок, выход которого подключен к четвертому входу третьего блока сравнения причем .выход блока распознавания контролиру0 ых эпеме тов подключен к третьему входу анализатора годности. Сущность изобретения заключается в том, что при помощи введенных блоков осуществляется систематическая автоматическая коррекция в процессе контроля положения контролируемой структуры модулей БИС подложки с точностью не хуж разрешающей способности телемикроскопов (микроскоп, блок преобразования оптического в электрический сигнал, в деоконтрольное устройство блока представления результирующей информации), причем по трем параметрам: двум взаимно перпендикулярным линейным и одному угловому за счет чего достигает ся повышение точности. Предлагаемое устройство работоспособно, если контуры элементов периодической структуры модулей БИС имеют хотя бы частично линейные участкть На фиг. 1 изображена блок-схема оптико-телевизионного устройства для контроля периодической планарной структуры; на фиг. 2 - схема, поясняющая принцип коррекции по одному элементу контролируемой структуры; на фиг. 3 схема, поясняющая принцип коррекции по группе элементов контролируемой структуры; на фиг. 4 - блок-схема счета импульсов совпадения; на фиг. 5 временные диаграммы, поясняющие принцип работы двухуровневого квантователя Оптико-телевизионное устройство для контроля периодической шшнарной структуры содержит блок 1 управления, синхронизатор 2, блок 3 перемещения контролируемой подложки, микроскоп 4, блок 5 преобразования оптического в электрический сигнал, первый мультиплексор 6, АЦП 7, блок 8 распознавания контролируемых элементов, первый блок 9 памяти, анализатор 10 годности, блок 11 представления результирующей информации, двухуровневый квантователь 1 второй мультиплексор 13, первый блок 14 счета импульсов совпадения, выполненный в виде дешифратора 14-1, элементов И 14-2, счетчтасов 14-3, шифрап торов 14-4, второй блок 15 счета импульсов совпадения, третий мультиплексор 16, пер.вый блок 17 выявления максимума, второй блок 18 памяти, первый блок 19 сравнения, второй блок 20 срав нения, первый блок 21 уставок, второй блок 22 уставок, второй блок 23 выявления максимума, третий блок 24 памял ти, третий блок 25 сравнения, третий блок 26 уставок. Блок 1 управления построен на базе микро-ЭВМ С-5-21 и имеет процессор, к входам которохч) пошслючены дешифратор, пульт управления, блок памяти, а к & 4 выходам - входы блока памяти и шифрагтора. Блок 3 перемещения контролируеой подложки выполнен m базе блока перемещения Зонд-1А. Микроскоп 4 NH -2Е. Блок 5 преобразования опт&ческого в электрический сигнал выполнен на базе телекамеры КТ1Ъ-67, но без генератора частоты, который содержится в синхронизаторе 2, Блок 5 преобразова ния оптического в электрический сигнал может быть выполнен и на базе ШСматрицы. Анализатор 1О годности выполнен на базе функциональных модулей С-5-21. Блок 11 представления результирутощей информации состоит вз мультиплексора, к выходам кото.рого подключены видеоконтрольное устройство (ВКУ), табло с транспарантами, печатающее устройство. Через мультиплексор указанного блока протаведенр его подкяючение к четвертому выходу блока 1 управления, выход блока 5 преобразования оптического в электрический сигнал И выход анализатора 10 годности. Два блока 14 и 15 счета импульсов совпадения построены концептуально одинаково. Так первый блрд 14 счета импульсов совпадения выполнен в ввде (фиг. 4) дешифратора 14-1, к входу которого подключен первый выход второго мультвн- плексора 13, набора элементов И 14-2, к одному из входов которых подключен пятый выход синхронизатора 2, а вторые входы - к выходам дешифратора l4-1 по числу элементов И, набора, счетчиков 14-3, построенных на D-триггерах, вход каждого из которых подключен к выходу соответствующего элемента И (т.е. каждому счетчику соответствует свой элемент И), а выход каждого счетчика подключен к соответствующему . входу шифратора 14.-4 (число входов шифратора 14-4 соответствует числу счетчиков), выход шифратора 14-4 подключен к первому входу третьего мупьтиплексора 16. Блоки 17 и 23 выявления максимума построены на базе функциональных модулей С5-21. Принцип кор рекции следующий (фиг.2). Пусть имеется контур (К) элемента периодической планарной структуры модулей БИС (фиг. 2а), имеющий линейные участки (на представленной фигуре указан топологический контур гранвистора БИС ЗУ). Просмотр поля зрения микроскопа блоком 5 преобразования оптического в электр ческий сигнал осуществляется путем преобразования оптического сигнала в гор&. зрнгальвых строках по оси X (за период между строчными задающими импульсамк развертки (С) и по оси У вертикально (за период между кадровыми задающими импульсам развертки). Если в каждой строке (С) подсчитывать сколько раз контур (К) в нее попадает (путем подсч&та совюсадений в каждой строке электр. ческого сигнала (К) с тактовыми импульсами в период .Между началом и концом строки), то можно получить распределение чисел совпадений (фиг, 26,в, г) по определенному количеству строк развертки блока Б преобразования оптического в электричесжий сигнал, в которых располо жен контур элемента (К) (фиг. 2а). По полученному распределению чисел можно судить о том, расположены ли линейные участки контура (К) эпааента, например горизонтально или нет. Если линейные участки контура (К) элемента, например расположены строго горизонтально или иначе говоря в одной строке, то число совпадения сигнала линейного участка ко тура, (В) элемента с тактовыми импульсами (ТИ) в строке имеет пик-максимум (фиг 2а) в получаемом распределении чи сел совпадений по сравнению с соседними строками, в противном случае (т.е. если линейные участки контура элемента расположены, например, не горизонтально) распределение чисел совпадений не имеет ярко выраженного максимума (максимумов) (фиг. 26,в). Достижение строго горизонтального положения, например, можно констатировать по получе нию распределения чисел совпадений с пиком-максимумом, равного определенному значению (фиг. 2г). Приближение к текому распределению чисел совпадений осуществляется благодаря тому, что, чем ближе линейные участки контура (К) эле мента, например, к горизонтали (при повороте контролируемой подложки блоком 3 перемещения кoнтpoлиpy«v oй подложки), тем больший максимум имеет распределение зисел совпадений (сравнифиг. 26,в,г). По достижении таким образом, например, горизонтальности лг нейной части контура (К) элемента (т.е. коррекции по угловому.параметру), можно произвести коррекцию при помощи полученного распределения чисел положения элемента вдоль оси У путем определения, в какой строке находитсяполученный пик-максимум, и сравнения это го номера строки с заданным номером строки (т.е. путем смещения контролируо юй пбдложки (КП) с элементом контролируемого модуля БИС вдоль оси У 98 74 так, чтобы пик-максимум был в нужной строке). Если установлен контур (К) с линейным участком горизонтально, например, по распределению чисел совпадений по строкам, т.е. по оси X (фиг. 2г), то можно скорректировать положение контура элемента и вдоль, оси X путем вычис ления числа совпадений строк и сигналов контура (К) элемента в каждой вертикали, которую можно задать одномерными тактовыми импульсами (ТИ) (например. каждому ТИ присвоить номер в пределах каждой строки, задаваемой строчными импульсами, и тогда эти одномерные импульсы являются хорошим задатчиком вертикали), а следовательно, можно получить распределение чисел совпадений одномерных ТИ с сигналами контура (фиг. 2г), аналогичное распределению чисел совпадений ТИ в одной строке с сигналами контура (К) (фиг. 2г), и при наличии линейных участков контура (К) элементов по вертикали даже с ярко выраженными максимумами. Тогда можно скорректировать положение контура элемента и по оси X, т.е. установить линейные, например, участки контура (К) элемента в нужное положение путем корь. рекции по номерным ТИ. Обычно контролю подвергается не один элемент, а группа элементов контролируемой планарной структуры сразу (фиг. 3). В этом случае в соответствии с вышеизложенным принципом коррекции выделяется горизо тальная полоса Пу (группа строк) и вертикальная полоса Пу (группа однономерных тактовых импульсов), по которой и производится коррекция. Толщина полос (например, для П -число строк) определяется размерами одного элемента. В исходном состоянии (фиг. 1) контролируемая подложка (подложка с неразделенными модулями БИС) установлена на предметном столике блока 3 перемещения контролируемой подложки. Телемикроскоп (микроскоп 4, блок 5 преобразования оптического в электрический сигнал, ВКУ блска 11 представления резуль тирующей информации, подключенные через мультиплексор блока) настроен тш контроль планарной структуры контролируемой подложки, т.е. произведена фокусировка, отрегулирована , освещенность, коа страстность и т.д. Синхронизатор 2 с первого выхода блока ,1 управления. По изображению на ВКУ блока 11 представления результирующей информации оператором с пульта блока 1 управления путем подачтд управляющих сигналов с второго выхода и приема ответных на второй вход об отработке управляющих команд с ПОМОЩЬЮ блока 3 перемещения контролтфуемой подлоиоси осуществляется установка в исходное положение контролируемой подложки, т.е. в поле зрения микроскопа 4 находится первое поле пла €арной периодической структуры модуля БИС контролируемой подложки, напрв мер левый верхний угол левого верхнего модуля БИС контролируемой подложки. Планарнь1е периодические .структуры располагаются так (фиг. 3), чтобы линейные части контуров (К) элементов на- ходились на экране ВКУ близко к горизонтали (или вертикалг, причем расположение верхнего горизонтального края кон туров контролируемой структуры, также как и левый вертикальный край контуров располагаются на определенном заданном расстоянии от краев экрана ВКУ (визуальная грубая коррекшш). После этого оператором с пульта блока 1 управления подается сигнал по третьему выходу на |первый вход первого мультиплексора 6, который подключает вход блока, 5 преобразования оптического в электрический сигнал, к второму входу двухуровневого квантователя 12 (на А11П 7 с первого мультиплексора 6 сигналы не поступают) Блоком 1 управления по четвертому выходу на первый вход блока 11 представления результирующей информации подается сигнал, по которому вход ВКУ отключается от выхода блока 5 преобразования оптического в электрический сиг нал. Двухуровневым квантователем 12 .. производится преобразование аналогового сигнала блока 5 преобразования оптического в электрический сигнал в электрический сигнал двух уровней: логического О, если контура нет, и логической 1 если аналоговый сигнал несет информацию о контуре (К) элементов (фиг. 5). Д1 пустим горизонтальная полоса П« (фиг. по которой производится коррекция положения контролируемой структуры, толщиной в 10 .строк (С), тогда по управляк щим сигналам с пятого выхода блока 1 управления на первый вход второго мультиплексора 13 последним производится подключение в пределах одного кадра, т.е. в период между двумя кадровыми импульсами, подаваемыми с первого вых да синхронизатора 2 (равно как строчные и тактовые импульсы) на первый вход блока 1 управления через дещифратор 14-1 (фиг. 4) сигналов в период ежду импульсами строки с двухуровнеого квантователя 12 (фиг. 1) к соотетствующему элементу И 14-2 (фиг.4). .е. в период между первым и вторым строчным импульсом сигналы подаются первому элементу И, между твторым и третьим - к второму элементу И и т.д. На другой вход элемента И 14-2 подаются тактовые импульсы с пятого выхода синхронизатора 2. При совпадении по времени сигнала контура, вырабатываемого двухуровневым квантователем 12, с тактовыми импульсами на выходе элемента И 14-2 вырабатывается импульс. Вырабатываемые элементом И импульсы подсчитываются соответствующим счетчиком 14-3. Таким образом, в первом счетчике 14-3 накапливается число совпадений в первой строке, во втором во второй и т.д. С выходов счетчиков 14-3 через щифрагор 14-4 полученное распределение чисел совпадений поступает на второй вход третьего мультиплексора 16. Накопление счетчиками 14-3 чисел производится в период одного кадра. С окончанием кадра, т.е. с приходом второго кадрового импульса с синхрона-. затора 2 на первый вход блока 1 управления, последний вырабатывает управляющий сигнал, передаваемый по пятому выходу на первый вход второго мультиплексора 13 ,по которому через второй мультиплексор 13 до прихода следующей управляющей команды сигналов с двухуровневого квантователя 12 на блоки 14 и 15 счета импульсов совпадения не поступает. По прохождении второго строчного импульса (т.е. по окончании первой строки) блоком 1 управления с щестого выхода блока 1 управления на первыйвход третыего мультиплексора 16 подается управляющий сигншт, по которому число совпадений первого счетчика 14-3 первого блока 14 счета импульсов совпадения через щифратор 14-4, третий мультиплексор 16 поступает на первый вход первого блока 17 выявления максимума. Пе1. вый блок 1.7 выявления максимума запо.минает это число и номер строки (сигнал с второго выхода на первый вход первого блока памяти). С приходом третьего строчного т 1пульса на второй вход блока 1 управления последним вырабатывается сигнал на первый вход третьего мультиплексора 16, по которому третий мультиплексор 16 передает число совпадений во второй строке от второго счетчика 14-3 (фиг. 4), третий мультиплексор 16 на первый вход первого блока 17 выявпентш максимума сравнивает число совпадений первой строки (записанное во втором блоке 1.8 памяти) с числом совпадений второй строки (пришедшее с третьего мультиплексора 16) определяет наибольшее значение и зая сывает его во втором блоке 18 памяти а также соответствуюпшй номер строки (меньшее число в блоке памяти не записывается) и т.д. Таким образом выбирается максимальное значение распр деления чисел совпадений. С приходом двенадцатого импульса на первый вход блока 1 управления последним вырабатывается управляющий сигнал с шестого выхода через первый вход третьего лупь типлексора 16 на первый вход первого блока 17 выявления максимума, по которому он перезаписывает (вторые вход и выход) наибольшее число совпадений и соответствующий ему номер строки во вторую рабочую ячейку второго блока 18 памяти.а первая ячейка обнуляется и тем самым становится готовой для выявления максимума следующего распре деления. По завершении данно операции первым блоко 17 выявления максимума найденный макс мум ( число) передается по третьему выхо на второй вход первого блока 19 сравне ния. Одноврз«4енно с третьего выхода первого блока 17 выявления максимума н третий вход блока управления подается разрешаюишй сигнал на включение в работ первого и второго блоков 19 и 20срав нения. Блоком 1 управления по седьмому выходу на первый вход первого блока 19 сравнения подается сигнал на разрешение сравнения на первый вход первого блока 17 для сравнения максимального числа совпадений, полученного в первом блоке 17 выявления максимума с заданным числом первого блока 21 уставок (NVHCH , например). Если леншлй максимум меньше заданного значения, то по первому выходу первого блока 19 сравнения на четвертый вход блока 1 управления подается сигнал, по которому последний вырабатывает упра&Л5аощий сигнал пробного шага поворота в любую сторону, передаваемый на вход блока 3 перемножения контролируемой подложки. Отработав пробный шаг поворота контролируемой подложки, блок 3 перемещения контролируемой подложки передается с электрического выхода на второй вход блока 1 управления сигнал обратной связи об этом. С приходом сигнала обратной связи блока 3 аврвмвщения контролируемой подложки, а зат1ем очередного кадрового импульса с пврвого выхода синхронизатора 2 блоком 1 управления подаются управляющие сипналы на второй и третий мультиплексор 13 и 16, аналогичные вышеизложенному и снимается второе распределение чисел совпадения (фиг. 2в), а первым блоком 17 выявления максимукш определяется максимум второго распределения и соответствующий ему номер строки аналогично вышеизложенному. По двенадцато-. му строчному импупьсу блоком 1 управления по шестому выходу через первый вход с первого выходе третьего мультиплексора 16 подается на первый вход первого блока 17 выявиения максимума, по которому значение максимума (числа) второго распределения подается с треть его выхода первого блока 17 выявления максимума на второй вход первого блока 19 сравнения. С приходом тринадцатого строчного импульса с первого выхода синхронизатора 2 на первый вход блока 1 управления последним вырабатывается , передаваемый с седьмого выхода на первый вход первого блока 19 сравнения. По этому сигналу в первом блоке 19 сравнения производится сравнение максимума предыдущего распределения (фиг. 26) с максимумом второго полученного распределения (фиг. 2в), передаваемых через первый блок 17 выявл&ния ма ксимума из второй и первой рабочих ячеек второго блока 18 памяти. Если максимум (число}, второго распределения меньше первого, то первым блоком 19 сравнения вырабатывается сигнал, передаваемый по первому выходу на четверн. тый вход блока 1 управления, и пробный шаг делается в другую сторону. Если максимум второго распределения (число) больше первого, то второй максш сум сравнивается с заданным значением (например, Ытау) блока 21 уставок. Далее проиаводатся операции по ск-гещению о тех лор, пока максимум какого-то аспределения (число совпадений) не бует равно ,o)(. Первый блоком 19 сравения по второму выходу на третий вход ервого блока 17 выявления максимума одается один из двух сигналов: последущий максимум меньше предыдущего этом случае первый блок 17 выявления аксимума по второму выходу на первый ход второго блока 18 памяти подается игнал, по которому значение максималь ого числа совпадений последующего рао ределешш и соответствующий номер троки в первой рабочей ячейке стирают15ся, а содержимое второй рабочей ячейки остается без изменения (т.е. записано максимальное число совпадений предыду щего распределения и соответствующий номер строки); последующий максимум больше предыдущего - в этом случае первый блок 17 выявления максимума, взаимодействуя (вторые вход и выход) С вторым блоком 18 памяти (первые вы ход и вход), обнуляет вторую рабочую ячейку второго блока 18 памяти, записывает в нее значение максимума второго распредштения и соответствующий номер строки, а затем обнуляет первую рабочую ячейку. Как только максимум распределентет числа совпадений будет не меньше заданного значения (наприме ), что определяется в первом блоке 19 сравнения, последним вырабатывается сигнал, цередаваемый с первого вых ода на четвертый вход блока 1 управления, в котором отключается командная часть угловой коррекции процессора блока 1 управления и подключа ется командная часть линейной по оси коррекции. Одновременно с указанным сигналом по второму и третьему выходу первого блока 19 сравнения подаются разрещают1ше сигналы на третий вход второго блока 20 сравнения и второй вход V третьего блока 2,5 сравнения. В этот мо мент включается в работу второй блок 20 сравнения, т.е. по второму выходу с него подается запросный сигнал во второй блок 18 памяти. В ответ по второму выходу второго блока 18 памяти на второй вход второго блока 2О сравнения подается из второй ячейки номер строки (число), гдетходится максимум распределения чисел совпадений. Номер этой строки сравнивается с заданным номером второго блока 22 уставок во втором блО ке 20 сравнения и последним результирующая информация передается с первогс выхода на пятый вход блока 1 управления, который вырабатывает управляющие сигналы линейной коррекции по оси У и передает их по второму выходу на вход блока 3 перемещения контролируемой подл хяски. Блок 3 перемещения контролируемой подложки производит смещение контролируемой подложки и по отработке команды передает сигнал обратной связи на второй вход блока 1 управления Блок 1 управления после этого с прихол. J..,, . дом от синхронизатора 2 очередного кад рового импульса передает с пятого выхо да на первый вход второго муяьтиплек- icopa 13 управляющие сигналы, по кото4рым последний подключает сигналы кон-, тура, вырабатываемые двухуровневым квантователем 12, к выходу второго блока 15 счета импульсов совпадения, построенного и работающего аналогично первиугу блоку 14, с той разницей, что счетчики подсчитывают .число совпадений сигнала контура с одномерными тактовыми импульсами в строках в пределах всего кадра (т.е. между двумя кадровыми импульсами). Таким образом, во втором блоке 15 счета импульсов совпадения накапливается распределение чисел совпадений по вертикали (вдоль оси X). По окончании кадра, т.е. с приходом очередного кадрового импульса с синхронизатора 2 на первый вход блока 1 управлэния последним вырабатывается управляющий сигнал с пятого выхода на первый вход второго мультиплексора 13, по которому последний больше сигналов с выхода двухуровневого квантователя 12 не передает на входы блоков 17 и 15. После этого блоком 1 управления вырабатываются управляющие сигналы. передаваемые с шестого выхода на вход мультиплексора 16, который, в свою очередь, передает поочередно числа, подсчитанные счетчиками второго 15 счета импульсов совпадения, во второй блок 23 выявления, максимума. Второй блок 23 выявления максимума определяет максимальное значение полученного распределения чисел совпадения, взаимодействуя с третьим блоком 24 памяти. С приходом третьего кадровог;го импульса с первого выхода синхронизатора 2 на первый выход блока 1 управления, последний вырабатывает разрешающий сигнал, подаваемый с девятого выхода блока 1 управления на первый вход третьего блока 25 сравнения. По этому сигналу начинает работать третий блок 25 сравнения, вырабатывая запрооный сигнал, передаваемый с третьего выхода на второй вход третьего блока .. 24 памяти; из третьего блока 24 памяти по второму выходу на третий вхДД третьего блока 25 сравнения поступает номер (число) тактовых одномерных им. . пульсов, где оказался максимум, в треть ем блоке 25 сравнения производится сравнение полученного из третьего блока 24 памяти числа с заданным числом третьего блока 26 уставок, а результат ... сравнения из третьего блока 25 сравнег; кия по первому выходу этого блока поступает на шестой вход блока 1 управления. Блок 1 управления вырабатывает командные сигналы, передввабг«1ые на вход блока 3 перемещения контролируемой подложки и тем самым произвоаит ся коррекшш вдоль оси X. По отработке команды блоком 3 перемещения коп тролируемой подложки вырабатывается сигнал обратной связи, передаваемый на второй вход блока 1 управления. Блт ком 1 управления по этому сигналу вырабатывается сигнал, передаваемый с третьего выхода на первый вход первого мультиплексора 6. Первый мультиплек сор 6 отключает выход блока 5 преобразования оптического в электрический сигнал от второго входа двухуровневого квантователя 12 и подключаетч выход блока 5 преобразования оптического в электрический сигнал через мультиплек- тор 6 к входу АЦП 7. Далее производится преобразование аналогового сигнаг ла блока 5 преобразования оптического в электрический сигнал в цифровую в АПП 7, распознавание контролируемых элементов в блоке 8, анализатором 10 годности производится сравнения по-стухшющей информации о распознанных . элементах с блока 8 с образцовой и фор 1ацией, хранящейся в первом блоке 9 памяти (анализатором 10 годности за- прашивается по перв1 ду выходу информация об интересующем элементе, KOI орая передается в ответ из первого блока 9 пам5гги на второй вход анализатора 1О годности). Результат передается анализатором 10 годности по второму выходу на четвертый вход блока 11 представле кия резутхьтирующей информации. Пока производится обработка информации в АЦП 7 и блоке 8, блоком 1 управления подаются следующие сигналы; с пятоги шлхода через второй мульт шшксор 13 в первый и второй блоки 14 и 15 счета импульсов совпадения, в которых производится обнуление счетчиков 14-3 (фиг. 4); с шестого выхода через третий муль гиплексор 16 На первые входы первого и второго блоков 17 и 23 выявления максимума, по которым последние произ водят обнуление содержимого первого и второго блоков 18 и 24 памяти, соо-рветственво:с седьмого, восьмого, девятого выходов подаются сигналы Запрещение I сравнения в соответствующие блока 19, 20 и 25 сравнения. Таким образом про .изводится подготовка к коррекции следу ющего участка контролируемой структуры модуля БИС. Через ощ)& деленный промежуток времени, необходвн мый для обработки информации в АЦП 7,. блоке 8 распознавания контролируемых элементов, авалдааторв Ю годности и выдачи результатов в блок 11 представления результирующей информации, о- считываемый в блоке 1 управления, последним вырабатывается управляющий сигнал передаваолый по второму выходу на вход блока 3 перемещения контролируемой подложки, и производится перемещение контролируемой подложки, так, чтобы в поле зрения микроскопа 4 tncaзался следующий участок контролирушюй периодической планарной структуры (по программе). Далее действия устройства в автоматическом режиме аналогичные вышеизложенному без участия оператора. Таким образом, благодаря введенным блокам и связям удается систематичеоки корректировать положение контроле руемоА структуры в поле зрения микро- . скопа 4 и тем самым однозначно проконтролировать ее, не рискуя упустить какие-то учасГки ошибок работы блока 3 перемещения контролируемой подложки, что в конечном счете повышает точность контроля. Кроме того, а&томатическая коррекция без вмёшател ства при контроле одной подложки повышает производительность контроля. Формула изобретения Оптико-телевизионное устройство для контроля периодической планарной структуры, содержащее блок управления, синхронизатор, первый вход и первый выход которого подключены соответственно к первсшу выходу и первому входу блока управления, блок перемещения контролируемой подложки,, вход и первый выход которого подключены соответственно к второму выходу и второму входу управления, микроскоп, оптически cesiэанный с блсжсяд перемещения ковтролвруемой подложки, блок преобразования оптического в электрический сигнал, эл&ктрическнй вход которого тгодключен к второму выходу синхронизатора, а оптян ческий вход - к выходу микроскопа, мультиплексор, первый и второй входы которого подключены соответственно к третьему выходу блока управления и выходу блока преобразования оптического в электрический сигнал, аналогоцифровой преобразователь, первый и вто9рой входы KOToporx) подключены соответственно к третьему выходу синхронизатора и первому выходу первого мультиплексора, блок распознавания контролируемых элементов, первый и второй вход которого подключены соответственно к третьему выходу синхронизатора и выходу аналого-цифрового преобразователя , первый блок памяти, анализатор годности, первый и второй входы которого под.ключены соответственно к третьему выходу синхронизатора и выходу первого блока памяти, а первый выход которого подключен к входу первого блока памяти блок представления результиру ощей информации, первый, второй, третий и четвертый входы которого подключены соот ветственно к летвертому выходу блока управления, третьему выходу синхронизатора, второму выходу первого мультиплексора и второму выходу анализатора годности, отличающееся тем, что, с целью повышения точности, в него введены двухуровневый квантователь, первый и второй входы которого подключены соответственно к четвертому выходу синхро1гизатора и третьему выходу первого мультиплексора, второй мультиплексор, первый и второй входы которого подключены соответственно к пятому выходу блока управления и выходу двухуровневого квантователя, первый блок счета импульсов совпадения, первый и второй входы которого подключены соответственно к пятому выходу синхронизатора и первому выходу второго мультиплексора, второй блок счета импульсов совпадения, первый и второй входы которого подключены соответственно к шестому выходу синхронизатора и второму выходу второго мультиплексора, третий мультиплексор, первый, второй и третий входы которого подключены соответствен но к шестому выходу блока управления, В1ЛХОДУ первого блока счета импульсов , совпадения, первый блок выявления максимума, первый вход которого подключен к первому выходу третьего мультиплексора, а первый выход которого подключен к третьему входу блока управления, второй блок памяти, первый вход и первыход которого подключены соответствен но к второму выходу и второму входу первого блока выявления максимума, пер вый блок сравнения, первый и второй вх 420 ы которого подключены соответственно седьмому выходу блока управления и третьему выходу первого блока выявления максимума, а первый и второй выходы которого подключены соответственно к червертому входу блока управления и третьему входу первого блока выявления максимума, первг й блок уставок, выход которого подключен к третьему входу первого блока сравнения, второй блок сравнения, первый, второй и третий входы которого подключены соответственно к восьмому выходу блока управления, третьему выходу первого блока сравнения, второму выходу второго блока памяти, а первый и второй выходы которого подклпочены соответственно к пятому входу блока управления и второму входу второго блока памяти, второй бпок уставок, выход которого подключен к четвертому входу второго блока сравнения, второй блок выявления максимума, первый вход которого подключен к второму выходу третьего мультиплексора, третий блок памяти, первый вход и первый выход которого подключены соответственно к первому выходу и второму входу второго блока выявления максимума, третий блок сравнения, первый, второй и третий входы которого подключены соответственно к девятому выходу блока управления, .четвертому выходу первого блока сравнения, второму выходу третьего блока па- мяти, а первый и второй выходы которого подключены соответственно к шестому входу блока управления и второму входу третьего блока памяти, третий блок уставок, выход которого подключен к четвертому входу третьего блока сравнения, причем выход блока распознавания контролируемых элементов подключен к третьему входу анализатора годности. Источники информации, принятые во внимание при экспертизе 1.Optron-ios, beit I (ФРГ). Проспект фирмы. 2.Ведерников В. В., Горюнов Н.Н., Ленский И. И. Автоматизированный ко№троль качества планарных структур. Зарубежная электронная техника, 1979, № 15, с. 33-47. 3. Экспресо-информашм. Сер. Электроника. М., ВИНИТИ, 1979, № 22, реф. №139, с. 16-20 (прототип).
иь.1
Tu
11.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля подложки больших интегральных схем | 1982 |
|
SU1027654A1 |
| Устройство для контроля периодической структуры большой интегральной схемы | 1982 |
|
SU1037194A1 |
| Устройство автоматической коррекции координатных искажений телевизионного изображения | 1981 |
|
SU1012456A1 |
| Устройство дефектоскопического контроля планарных структур | 1985 |
|
SU1381731A1 |
| Устройство контроля изображений объекта | 1989 |
|
SU1672590A1 |
| Устройство для контроля блокапОСТОяННОй пАМяТи | 1979 |
|
SU822298A1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| Телевизионный селектор движущихся объектов | 1980 |
|
SU890950A1 |
| Устройство для контроля схем цифровых вычислительных машин | 1978 |
|
SU734691A1 |
| Устройство для контроля оперативной памяти | 1981 |
|
SU957279A1 |

.- t ftT-I
.W r«
1НН11111НШ1111Н11(1Н(НН111111НИ11Н11 |1й{|1ШИ1
f
ESP саэ Gap STT JSS S COb tfC3 ESb d2a
-t
fgg ЧаР
tits.9
Фи1.5
