(54) РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА-ЛОПАТЫ
1
Изобретение относится к землеройным машинам, в частности к рабочему оборудованию экскаватора-лопаты.
Известно рабочее оборудование экскаватора-лопаты, включающее стрелу, рукоять, реечный напорный механизм и седловой подшипник. К корпусу седлового подшипника жестко прикреплены верхний и боковые цельные ползуны, которые направляют рукоять внутри седлового подшипника и кремальерной шестерни относительно напорного механизма, а также передают нагрузки от балки рукояти на стрелу через корпус подшипника. Между ползунами и корпусом седлового подшипника установлены плоские прокладки, при помош.и которых регулируют зазоры между балкой рукояти и седловым подшипником 1.
Однако повороты и перекосы рукояти в седловом подшипнике в процессе работы экскаватора приводят к неравномерному клиновидному износу ползунов, вследствие чего не удается с помощью прокладок поддерживать оптимальные зазоры между балкой рукояти и ползунами.
Известно также рабочее оборудование экскаватора-лопаты, включающее срелу.
рукоять, реечный напорный механизм и седловой подшипник с боковыми и верхними кассетами, выполненными в виде ползунов со сферической опорной поверхностью и подпружиненных центрирующих подкладок 2.
Такое выполнение ползунов обеспечивает их самоустановку по балкам рукояти, а вместе с тем более равномерный износ их рабочей поверхности, что способствует повышению долговечности ползунов и балок рукояти.
10
За счет того, что износ ползунов происходит равномерно по всей их площадке, необходимость в замене ползунов и их регулировке путем установки прокладок возникает реже, чем при жестком закреплении 15 ползунов, но тем не менее такая необходимость существует.
Кроме того, ползуны должны быть установлены с зазором относительно балки рукояти, так как поверхности скольжения балки невозможно выполнить идеально
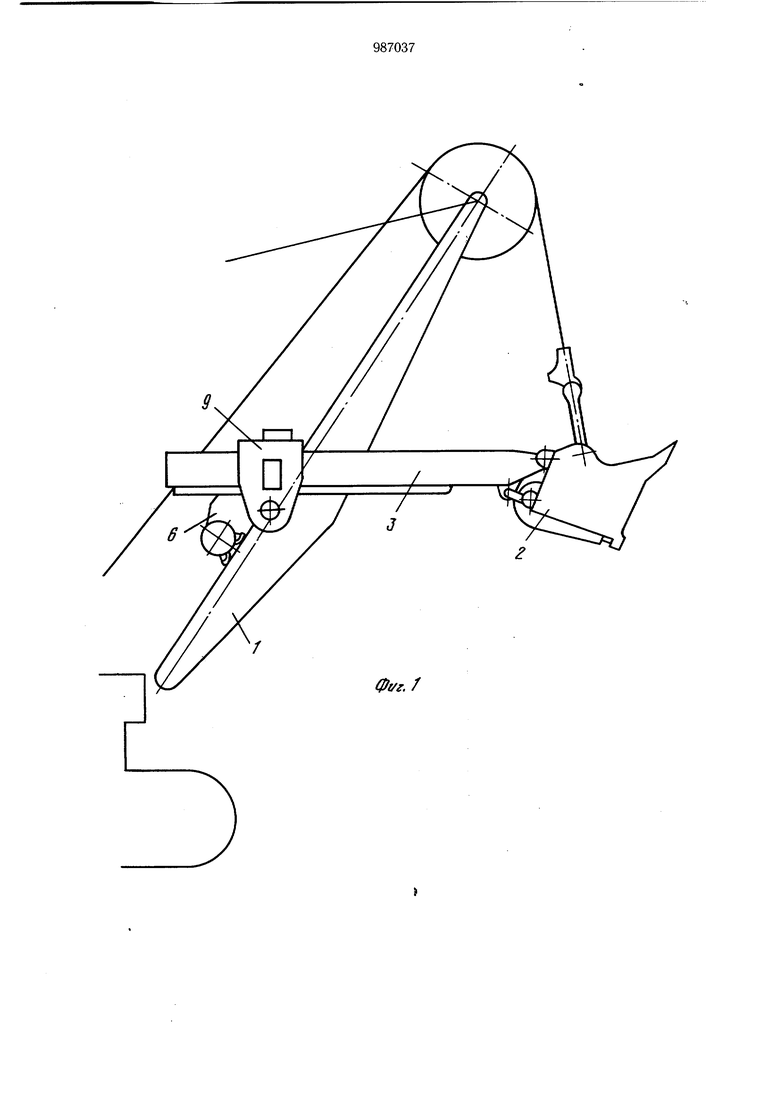
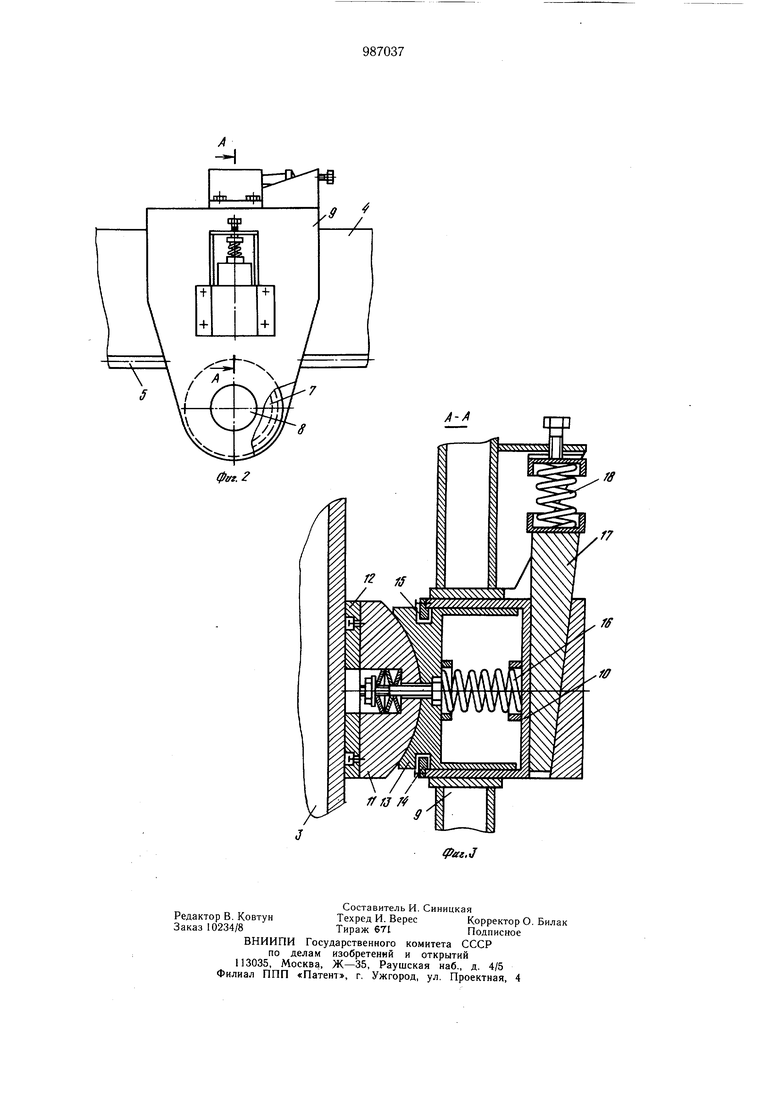
20 плоскими и параллельными, что в свою очередь, приводит к увеличению динамики привода и преждевременному износу балки рукояти и напорного механизма. В процессе работы зазоры постепенно возрастают до момента, когда будет осуществлена подрегулировка ползунов установкой прокладок. Цель изобретения - повышение долговечности рабочего оборудования и улучшение условий его эксплуатации. Поставленная цель достигается тем, что в рабочем оборудовании экскаватора-лопаты, включающем стрелу, рукоять, реечный напорный механизм и седловой подшипник с боковыми и верхними кассетами, выпол..ненными в виде ползунов со сферической опорной поверхностью и подпружиненных центрирующих подкладок, седловой подшипник имеет подвижно установленные стаканы с планками, в которых подвижно смонтированы подпружиненные центрирующие выполненные с пазами подкладок, установлен ные с возможностью размещения в пазах планок. Седловой подшипник снабжен самотормозящи.ми подпружиненными клиньями-, установленными с возможностью взаимодействия со стаканами. На фиг. 1 изображено рабочее оборудование, вид сбоку; на фиг. 2 - седловой подщипник, вид сбоку; на фиг. 3 - разрез А-А на фиг. 2. Рабочее оборудование включает стрелу 1, ковш 2, рукоять 3 с приваренной к ее балке 4 зубчатой рейкой 5, напорный механизм 6 с кремальерной шестерней 7. На валу 8 установлен седловой подщипник 9, в карманах которого подвижно установлены стаканы 10. В каждом стакане 10 размещена кассета, состоящая из ползуна 11 с антифрикционной накладкой 12, прикрепленного к центрирующей подкладке 13. Подкладка 13 имеет удлиненный цилиндрический хвостовик, которым она скользит в стакане 10. К торцу стакана 10 прикреплены планки 14, входящие с зазором в пазы 15 подкладки 13. Между подкладкой и днищем стакана размещена пружина 16, постоянно отжимающая кассету в сторону рукояти 3. Между стаканом и стенкой корпуса седлового подщипника размещен клин 17, нагруженный пружиной 18. Клин выполнен самотормозящим, т. е. с малым углом уклона. Устройство работает следующим образом. В процессе копания и погрузки породы рукоять 3 соверщает возвратно-поступательное перемещение в седловом подщипнике 9. При этом ползуны 11 своими антифрикционными накладками 12 прижаты к стенкам рукояти 3. Боковой поворот рукояти под действием инерционных сил ограничен планками 14, к которым прижимаются стенками 9 пазы 15 подкладки 13. По мере износа антифрикционной накладки кассета перемещается в сторону рукояти до тех пор, пока центрирующая подкладка 13 не упрется в планки 14 второй стенкой паза. При этом пружина 16 перестает давить через днище стакана на клин 17, и последний перемещается под действием собственного веса и пружины 18 вниз, перемещая при этом стакан 10 в сторону рукояти. Это приводит к восстановлению зазоров между планками 14 и стенками пазов 15 в подкладке 13. Процесс будет повторяться до полного износа антифрикционной накладки 12 ползуна П. Применение изобретения обеспечивает автоматическую регулировку зазоров между ползунами, прижатыми к рукояти, и опорНОИ поверхностью, а вместе с тем исключает чрезмерные перекосы рукояти относительно напорного механизма. Упругое прижатие ползунов к рукояти позволяет снизить динамические нагрузки в рабочем оборудовании, вызываемые перемещением рукояти на величину зазоров, а также исключает периодическую регулировку зазоров в седловом подщипнике в процессе эксплуатации и увеличивает срок службы балок рукояти, реек и кремальерных шестерен. Формула изобретения Рабочее оборудование экскаватора-лопаты, включающее рукоять, реечный напорный механизм и седловой подщипник с боковыми и верхними кассетами, выполненными в виде ползунов со сферической опорной поверхностью и подпружиненных центрирующих подкладок, отличающееся тем, что, с целью повышения долговечности рабочего оборудования и улучшения условий его эксплуатации седловой подшипник имеет подвижно установленные стаканы с планками, в которых лодвижно смонтированы подпружиненные центрирующие, выполненные с пазами подкладки, установленные.с возможностью размещения в пазах планок, при этом седловой подшипник снабжен самотормозящими Г1одпружиненными клиньями, установленными с воЗтиожностью взаимодействия со стаканами. Источники информации, принятые во внимание при экспертизе 1.Сатовский Б. И. и др. Современные карьерные экскаваторы. М., «Недра, 1971, с. 54, рис. 31. 2.Авторское свидетельство СССР № 644914, кл. Е 02 F 3/30, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование одноковшового экскаватора | 1974 |
|
SU644914A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2577870C2 |
| Рабочее оборудование одноковшового экскаватора | 1978 |
|
SU994624A2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА (ВАРИАНТЫ) | 2008 |
|
RU2407861C2 |
| Седловой подшипник для экскаватора с реечным механизмом напора | 1977 |
|
SU620540A1 |
| Рабочее оборудование одноковшового экскаватора | 1977 |
|
SU635175A1 |
| Напорный механизм одноковшового экскаватора | 1980 |
|
SU901389A1 |
| ПРИВОД НАПОРА КАРЬЕРНОГО ЭКСКАВАТОРА | 2016 |
|
RU2631060C2 |
| Напорный механизм экскаватора типа прямая лопата | 1977 |
|
SU621833A1 |
| Рабочее оборудование одноковшового экскаватора | 1988 |
|
SU1668566A1 |