боковыми поверхностями силовых сухарей, причем последние соединены со стаканом упругой кинематической связью, кЪнтактирующие.поверхности стакана и управляющих сухарей вьщолнены под углом, большим угла сухого трения, а контактирующие поверхности силовых и управляющих сухарей выполнены под углом, меньшим угла сухого, трения.
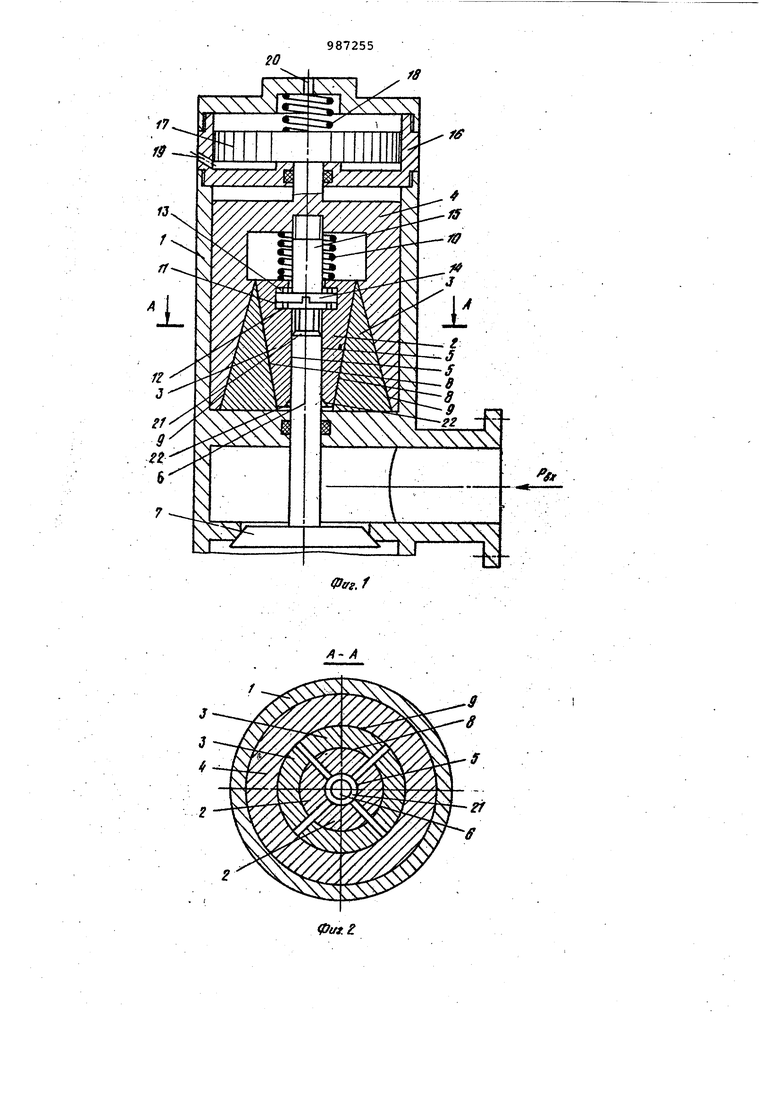
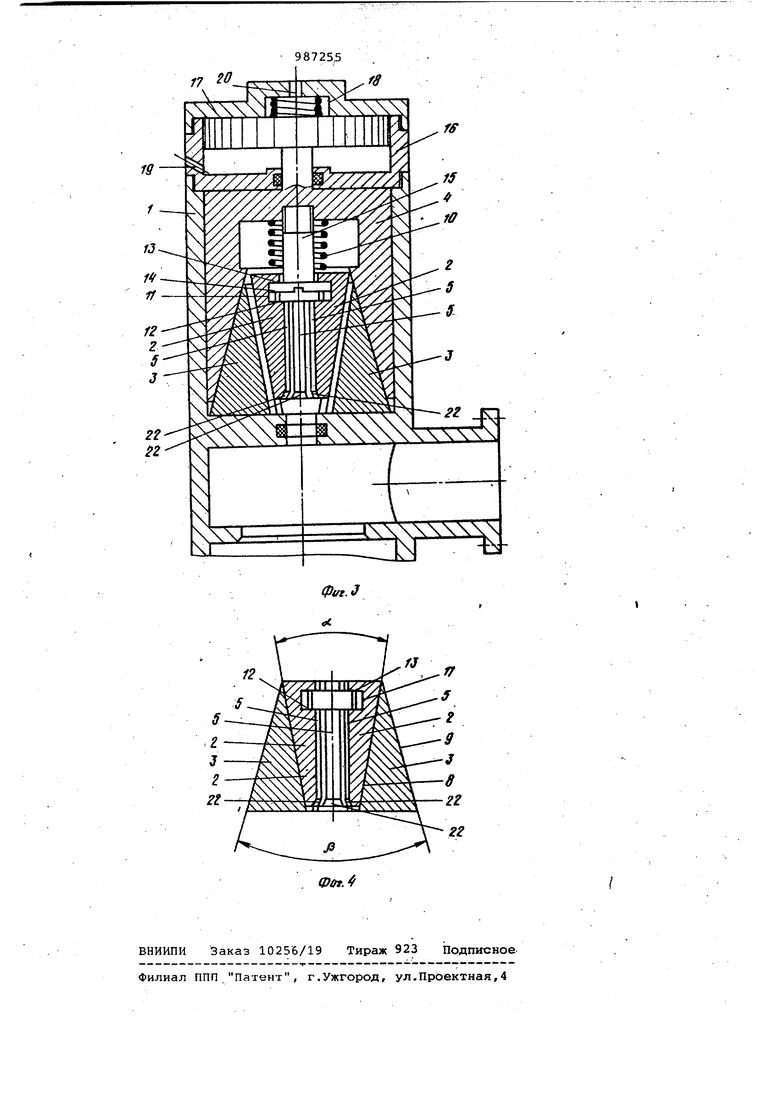
На фиг. 1 изображена конструкция механического привода, общий вид, разрез; на фиг. 2 - сечение А-А на фиг.1; на фиг. 3 - привод в открытом положении, разрез; на фиг. 4 - конфигурации силовых и управляющих сухарей.
Механический привод содержит корпус 1, в котором размещены силовые сухари 2, управляющие сухари 3 и стакан 4. СВОИ1/И рабочими поверхностями 5 силовые сухари 2 удерживают шток б отделяемой детали (клапана 7), на который действует давление Pg.. Своим наружными поверхностями 8 силовые сухари 2 взаимодействуют с соответствующими поверхностями управляющих сухарей .3 (фиг. 1, 2, 4). Поверхности 8 выполнены под углом о6(фиг. 4). Угол d- должен быть меньше угла сухого трения, т.е. .ot arctg f-,-p/ где f „коэффициент трения первого рода. Для стали f тр 0,15-0,3, следовательно, минимальный угол сухого трения для стальных поверхностей равен arctg 0,15 8,5°. Угол Р. целесообразно выбирать в пределах об 2-6°. Управляющие сухари 3 взаимодействуют со стаканом 4 по поверхностям 9 (фиг. 1, 2, 4, которые выполнены по углом р (фиг. 4). Угол р должен быть больше угла сухого трения. Для стальных поверхностей угол /S целесообразно-выбирать в пределах J3 17-30, так как максимальный угол сухого трения равен arctg 0,3-16,7. Силовые сухари 2 подпружинены относительно стакана 4 пружиной 10. Кроме того в верхней (нерабочей части силовых сухарей 2 выполнен паз ,11 с нижним 12 и верхним 13 буртами. Между 12 и 13 находится головка 14 винта 15, который жестко соединен со с таканом 4.
Зазор между головкой 14 винта 15 и буртами12 и 13 паза 11 выбирается по конструктивным соображениям и может находиться в пределах 0,3-3 мм Таким образом, пружина 10, Винт 15 с головкой 14 и паз 11 выполняют роль упругой кинематической связи, соединяющей силовые сухари 2 со стаканом 4.
С корпусом 1 механического привода жестко соединено управляющее устройство 16, например, пневматическое устройство с поршнем 17, который
подпружинен пружиной 18. Окно 19 служит для подвода давления сжатого воздуха в рабочую полость управляющего устройства 16. Окно 20 постоянho соединяет нерабочую полость с атмосферой.
В верхней части штока 6 и нижней части силовых сухарей 2 выполнены фаски 21 и 22 соответственно Эти фаски предназначены для улучшения
условий раскрытия силовых сухарей 2 при захвате штока 6 во время возведения привода в рабочее положение после срабатывания.
В рабочем, т.-е. закрытом положении (фиг. 1, 2) на клапан 7 действует сила давления Pg. По действием этойсилы клапан 7 со штоком 6 стремится выйти .вниз. Однако такому перемещению препятствуют силовые сухари 0 2, которые своими рабочими поверхностями 5 охватывают шток 6 и удерживают его в верхнем положении за счет сил трения. Благодаря тому, что поверхности S выполнены под углом d ,меньшим угла сухого трения, то силовые .:.
сухари 2 надежно заклинивают шток 6 за счет усилия на самом штоке 6 и за счет поджатия пружины 10. Для того, чтобы силовые сухари 2 позволили што0 ку .6 беспрепятственно отойти вниз, они Должны отойти на некоторое расстояние дальше от оси привода. Однако такому отходу препятствуют управляющие сухари 3, которые взаимодейству5 ют с силовыми сухарями 2 по поверхностям 8. Радиальному перемещению управляющих сухарей 3, а значит и радиальному перемещению силовых сухарей 2, препятствует стакан 4, который
0 взаимодействует с сухарями I по поверхностям 9. Стакан 4 поджат в крайнее нижнее положение пружиной 18, действует на него через -лоршень 17 управляющего устройства 16. ТакиМ;
5 образом, в рабочем положении стакан 4 поджат пружиной 18 в крайнее нижнее положение и удерживает сухари 3 и 2 в положении с наименьшим удалением от оси привода. К окнам 19
и 20 в этом случае подведено атмосферное давление. При этом происходит удержание штока 6 отделяемой детали (клапана 7) за счет сил трения, возникающих прк взаимодействии штока 6
с силовыми сухарями 2 по поверхностям 5. Предварительный зажим штока 6 осуществляется за счет силы поджатия пружины 10. Механический привод закрыт происходит удержание штока 6, на который действует осевое усилие.
Для приведения привода,в открытое положение, т.е. для отделения штока 6 клапана 7,, необходимо подать давление сжатого воздуха в окно 19.При этом поршень 17 переместится вверх,
сжав пружину 18, и переместит за собой стакан 4 (фиг. 3). .После перемещения вверх стакан 4 освободит управляющие сухари 3 и даст им возможность переместиться от оси привода на некоторое расстояние. Контактное взаимодействие в этот момент нарушается, так как силовые сухари 2 утратили свою опору, и удержание штока 6 клапана 7 прекращено. Шток б может свободно выйти из полости привода вниз на неограниченное расстояние. Под действием пружины 10 силовые сухари .2 опустятся вниз на расстояние равное зазору между буртом 13 паза 11 и головкой 14 винта 15, Управляющиё сухари 3 в открытом положении занимают произвольное положение в заЭоре между стаканом 4 и силовыми сухарями 2. привод сработал, произошло отделение штока б клапана 7.
Если теперь к окну 19 подвести дав ление воздуха, разное атмосферному, то под действием пружины. 18 поряиень 17 опустится в нижнее положение и переместит за собой стакан 4. Переместившись вниз, стакан 4 сместит к оси привода управлякадие сухари 3. Силовые сухари 2 также получат возможность опуститься вниз до упора. Все детали привода находятся в статическом положении. Механический привод готов к следующему циклу работы, т.е к захвату отделяемой детали.
Для приведения механического привода в рабочее положение необходимо под воздействием постороннего усилия подвести и перемещать вверх шток б. Последний своей торцевой поверхностью переместит на некоторое расстояние вверх силовые сухари 2, сжав прк этом пружины 10. После некоторого перемещения вверх, йе превышающего величины зазора между головкой 14 винта 15 и буртом 12 паза 11, силовые сухари 2 разойдутся дальше бт оси привода, благодаря фаскам 21 vt 22, я пропустят между поверхностями 5 шток б, который
переместится вверх до своего крайнего положения. Под действием пружины 10 силовые сухари 2 опустятся вниз г до упора и заклинят штокб в его кранем верхнем положении. Произошло Заклинивание отделяемой детали. Механический привод готов к работе, т.е. к удержанию отделяемой детали (клапана 7J, на которую действует осевая .:ила.
Технико-экономическая эффектив ность изобретения заключается в расширении эксплуатационных возможностей устройства и увеличении его быстродействия. .
Формула изобретения
Механический Привод, содержащий корпус, в котором е азмещены подпружиненные силовые сухари с наклонными боковыми поверхностями и управляющее устройство, о тл и ч ающий с я тем, что, с целью расширения эксплуатационных возможностей и увеличения быстродействия, в корпусе привода размещен соединенный с управляющим устройством стакан с управляющими сухарями, установленными в его полости с возможностью взаимодействия с внутренней поверхностью стакана и боковыми поверхностями силовых cykaрей, причем последние-соединены со стаканом упругой кинематической связьй, контактирующие поверхности стакана и управляющих сухарей выполнены под углом, большим угла сухого трения, а контактирующие поверхности силовых и управляющих сухарей выполнены под углом, меньшим угла сухого трения : .
Источники информации, . принятые йо внимание при экспертизе
1.Авторское свидетельство СССР по заявке 2938579/08, ;
кл. F 16 К 31/46, 1980.
2.Патент США 3403549,кл.73-103
ОПУбЛИК. 1968;
fff
| название | год | авторы | номер документа |
|---|---|---|---|
| Механический привод | 1981 |
|
SU1028936A2 |
| Механический привод | 1980 |
|
SU945572A1 |
| Гидравлическое устройство для демонтажа втулок из корпуса | 1987 |
|
SU1466929A1 |
| ШАРИКОВЫЙ ЗАМОК И СПОСОБ ВЫБОРА ЕГО ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ И СИЛОВЫХ ХАРАКТЕРИСТИК | 2014 |
|
RU2583767C1 |
| Устройство для возбуждения упругих колебаний в скважине | 1985 |
|
SU1330594A1 |
| Устройство для сборки резьбовых соединений | 1981 |
|
SU1046080A1 |
| Хирургический сшивающий аппарат для наложения линейных швов | 1978 |
|
SU1228832A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР РЕЖИМОВ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНЫХ ДОРОГ | 2008 |
|
RU2389621C2 |
| Многопозиционный станок | 1987 |
|
SU1454652A1 |
| ПАКЕР | 2000 |
|
RU2184208C2 |
fff
