Изобретение относится к механическим приводам с поступательным перемещением запорного элемента, к которому приложена большая осевая сила как в рабочем положении, так и в момент срабатывания. Изобретение может быть применено в качестве привода пневмогидравлических клапанов высокого давления в общем и химическом машиностроении, авиации. В качестве жесткого механического привода (замка) возможно применение в стреляющих пневмогидравлических поршнях, подъемно-транспортных механизмах и других отраслях народного хозяйства, где требуется разъединение нагруженных деталей.
По основному авт. св. № 93+128 известен механический привод, содержащий корпус, в котором размещены силовые захваты, взаимодействующие с головкой штока запорного элемента и с распорным звеном, связанным с управляющим устройством, причем силовые захваты выполнены в форме сухарей, являющихся секторами тора, внутренняя поверхность корпуса выполнена торовой, а распорное звено выполнено в форме тела вращения, ось которого совпадает с осью привода Г )
Известный механический привод характеризуется относительно невысокой надежностью. При работе привода в начальном диапазоне сил, когда движущие силы еще недостаточно велики для того, Мтобы вытеснять головные части сухарей из зоны захвата, а силы отжимающих пружин уже не способны переместить сухари в открытое положение из-за наличия сил трения, возникают условия, при которых сухари развертываются относительно крайних верхних точек торовых поверхностей (после рабочего перемещения рас.порного звена вниз), а выйти из зоны захвата они не смогут, так как фигурная головка штОка запорного элемента прижмет скошенные конические наружные поверхности головных частей сухарей к корпусу. Происходит заклинивание привода или перекос штока запорного элемента (если произошло заклинивание одного из сухарей). Аналогичное заклинивание может произойти и при закрытии привода, особенн в условиях вибрационных нагрузок.
Целью изобретения являтеся повышение надежности работы механическог
привода, что обусловлено устранением .заклинивания сухарей при работе.
Поставленная цель достигается тем, что сухари соединены кинематической связью с управляющим устройством, а распор.ное звено подпружинено относительно, управляющего устройства.
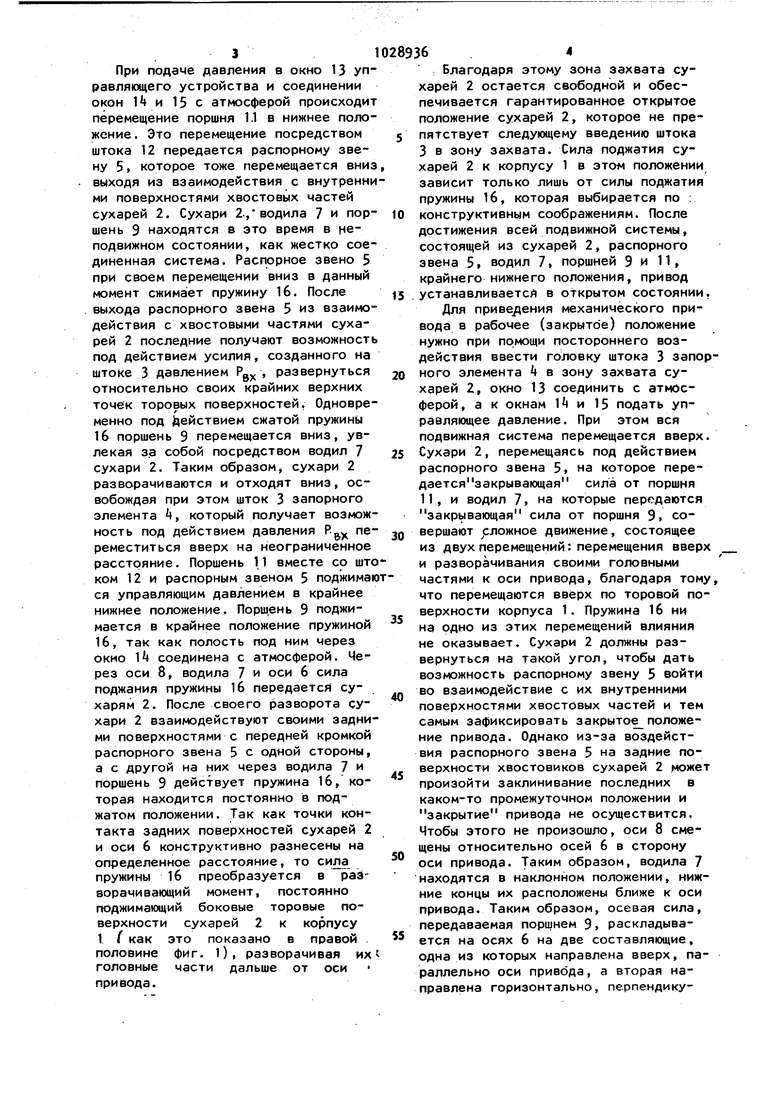
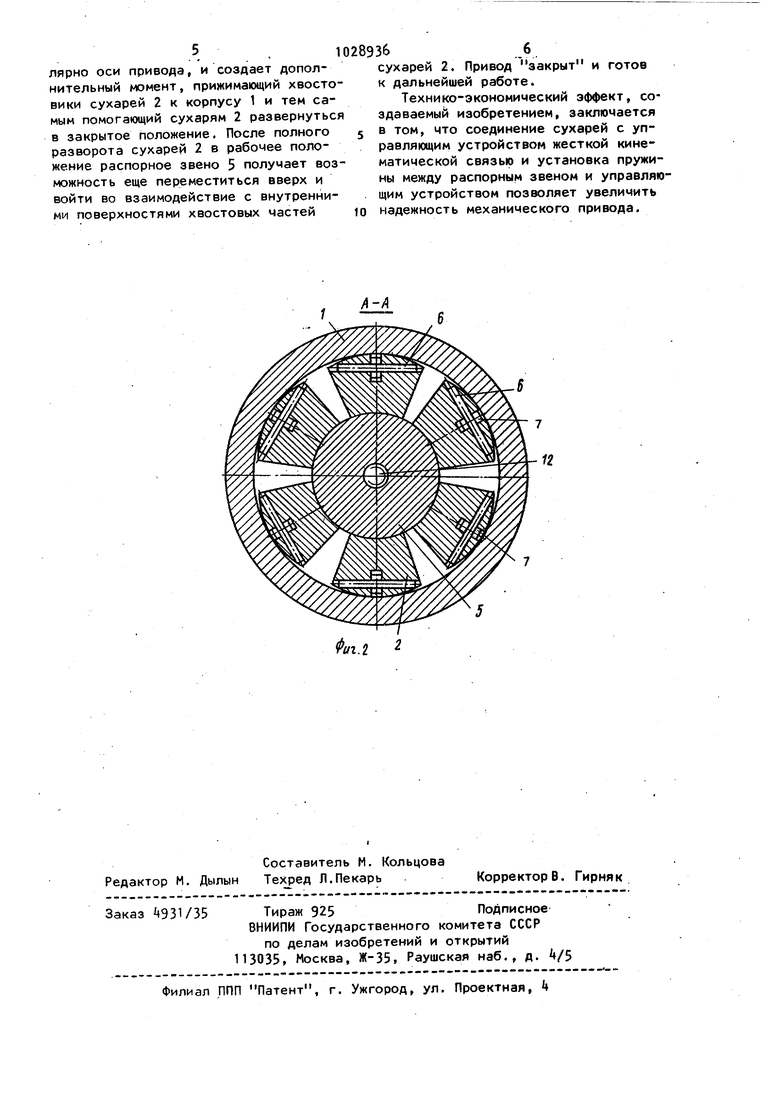
На фиг. 1 показана конструкция предлагаемого механического привода, разрез (левая половина описывает закрытое положение привода, а правая - открытое); на фиг. 2 - привод, закрытое положение, сечение А-А на фиг. 1.
Механический привод состоит из корпуса 1, в котором размещены сухари 2, удерживающие фигурную головку штока 3 запорного элемента . Своими хвостовыми частями сухари 2 взаимодействуют с распорным звеном 5, кроме того, к ним при помощи осей 6 крепятся водила 7, выполняющие роль жестких кинематических связей. Нижние концы водил 7 посредством осей 8 крепятся к поршню 9 управляющего устройства, которое в свою очередь состоит из составного корпуса 10, поршней 9 и 11 , штока 12, соединяющего распорное звено 5 с поршнем 11. В 10 управляющего устройства выполнены окна 13 для подачи команды (давления) на открытие привода и окна 1 и 15 для подачи команды на закрытие привода.. Пружина 16 постоянно отжимает распорное звено 5 от поршня 9 управляющего устройства.
В рабочем, т.е. закрытом положении, головка штока 3, связанная с запорным элементом , удерживается в крайнем нижнем положении сухарями 2. Под действием давления Р запорный элемент Ц вместе со штоком 3 стремится выйти вверх, развернув, а затем выдвинув сухари 2 из зоны захвата. Однако развороту сухарей 2 относительно крайних .верхних точек ихбоковых торовых поверхностей препятствует распорное звено 5, которое находится во взаимодействии с внутренними поверхностями хвостовых частей сухарей 2. Управляющее давление при этом подведено к окнам 15 и И управляющего устройства, и поршни 9 и 11 также поджаты этим давлением в свои крайние верхние положения. Происходит удержание фигурной головки штока 3 запорного элемента сухарями 2. Привод закрыт. При подаче давления в окно 13 управляющего устройства и соединении окон Н и 15 с атмосферой происходит перемещение поршня 1Л в нижнее положение. Это перемещение посредством штока 12 передается распорному звену 5 f которое тоже перемещается вниз выходя из взаимодействия с внутренни ми поверхностями хвостовых частей сухарей 2. Сухари 2-,водила 7 и поршень 9 находятся в это время в неподвижном состоянии, как жестко соединенная система. Распорное звено 5 при своем перемещении вниз в данный момент сжимает пружину 16. После выхода распорного звена 5 из взаимодействия с хвостовыми частями сухарей 2 последние получают возможность под действием усилия, созданного на штоке 3 давлением Pg , развернуться относительно своих крайних верхних точек торовых поверхностей. Одновременно под Действием сжатой пружины 16 поршень 9 перемещается вниз, увлекая за собой посредством водил 7 сухари 2. Таким образом, сухари 2 разворачиваются и отходят вниз, освобождая при этом шток 3 запорного элемента , который получает возможность под действием давления Р„у переместиться вверх на неограниченное расстояние. Поршень 11 вместе со што ком 12 и распорным звеном 5 поджимаю ся управляющим давлением в крайнее нижнее положение. Поршень 9 поджимается в крайнее положение пружиной 16, так как полость под ним через окно соединена с атмосферой. Через оси 8, водила 7 и оси 6 сила поджания пружины 16 передается сухарям 2. После своего разворота сухари 2 взаимодействуют своими задними поверхностями с передней кромкой распорного звена 5 с одной стороны, а с другой на них через водила 7 и поршень 9 действует пружина 16, которая находится постоянно в поджатом положении. Так как точки контакта задних поверхностей сухарей 2 и оси 6 конструктивно разнесены на определенное расстояние, то сила пружины 16 преобразуется в разворачивающий момент, постоянно поджимающий боковые торовые поверхности сухарей 2 к корпусу 1 ( как это показано в правой половине фиг. 1), разворачивая их головные части дальше от оси привода. Благодаря этому зона захвата сухарей 2 остается свободной и обеспечивается гарантированное открытое положение сухарей 2, которое не препятствует следукицему введению штока 3 в зону захвата. Сила поджатия сухарей 2 к корпусу 1 в этом положении зависит только лишь от силы поджатия пружины 16, которая выбирается по : конструктивным соображениям. После достижения всей подвижной системы, coctoящeй из сухарей 2, распорного звена 5 водил 7, поршней 9 и 11, крайнего нижнего положения, привод устанавливается в открытом состоянии. Для приведения механического привода в рабочее (закрытое) положение нужно при по.мощи постороннего воздействия ввести головку штока 3 запорного элемента k в зону захвата сухарей 2, окно 13 соединить с атмосферой, а к окнам И и 15 подать управляющее давление. При этом вся подвижная система перемещается вверх. Сухари 2, перемещаясь под действием распорного звена 5, на которое передается закрывающая сила от поршня 11, и водил 7, на которые передаются закрывающая сила от поршня 9, совершают рложное движение, состоящее из двух перемещений: перемещения вверх и разворачивания своими головными частями к оси привода, благодаря тому, что перемещаются вверх по торовой поверхности корпуса 1. Пружина 16 ни на одно из этих перемещений влияния не оказывает. Сухари 2 должны развернуться на такой угол, чтобы дать возможность распорному звену 5 войти во взаимодействие с их внутренними поверхностями хвостовых частей и тем самым зафиксировать закрыто положение привода. Однако из-за воздействия распорного звена 5 на задние поверхности хвостовиков сухарей 2 может произойти заклинивание последних в каком-то промежуточном положении и закрытие привода не осуществится. Чтобы этого не произошло, оси 8 смещены относительно осей 6 в сторону оси привода. Таким образом, водила 7 находятся в наклонном положении, нижние концы их расположены ближе к оси привода. Таким образом, осевая сила, передаваемая поршнем 9, раскладывается на осях 6 на две составляющие, одна из которых направлена вверх, параллельно оси привода, а вторая направлена горизонтально, перпендикулярно оси привода, и создает дополнительный момент, прижимающий хвостовики сухарей 2 к корпусу 1 и тем самым помогающий сухарям 2 развернуться в закрытое положение. После полного разворота сухарей 2 в рабочее положение распорное звено 5 получает возможность еще переместиться вверх и войти во взаимодействие с внутренними поверхностями хвостовых частей
закрыт
сухарей 2. Привод
и готов к дальнейшей работе.
Технико-экономический эффект, создаваемый изобретением, заключается в том, что соединение сухарей с управляющим устройством жесткой кинематической связью и установка пружины между распорным звеном и управляющим устройством позволяет увеличить надежность механического привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механический привод | 1980 |
|
SU934128A1 |
| Механический привод | 1980 |
|
SU974009A1 |
| Механический привод | 1980 |
|
SU945572A1 |
| Механический привод | 1981 |
|
SU987255A1 |
| СКВАЖИННЫЙ ИМПЛОЗИВНЫЙ ИСТОЧНИК СЕЙСМИЧЕСКИХ КОЛЕБАНИЙ | 2009 |
|
RU2456641C2 |
| ИМПЛОЗИВНЫЙ ИСТОЧНИК ДЛЯ ПОДВОДНОГО ПРОФИЛИРОВАНИЯ | 2010 |
|
RU2488143C2 |
| СПОСОБ ДЕПРЕССИВНОГО ГИДРОДИНАМИЧЕСКОГО ВОЗДЕЙСТВИЯ НА ПЛАСТ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2488683C2 |
| СКВАЖИННЫЙ ИМПЛОЗИВНЫЙ ИСТОЧНИК СЕЙСМИЧЕСКИХ КОЛЕБАНИЙ | 2010 |
|
RU2501042C2 |
| Механический привод | 1982 |
|
SU1038676A1 |
| Механический привод | 1986 |
|
SU1348596A2 |
/1-/Ч
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР IP , кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
