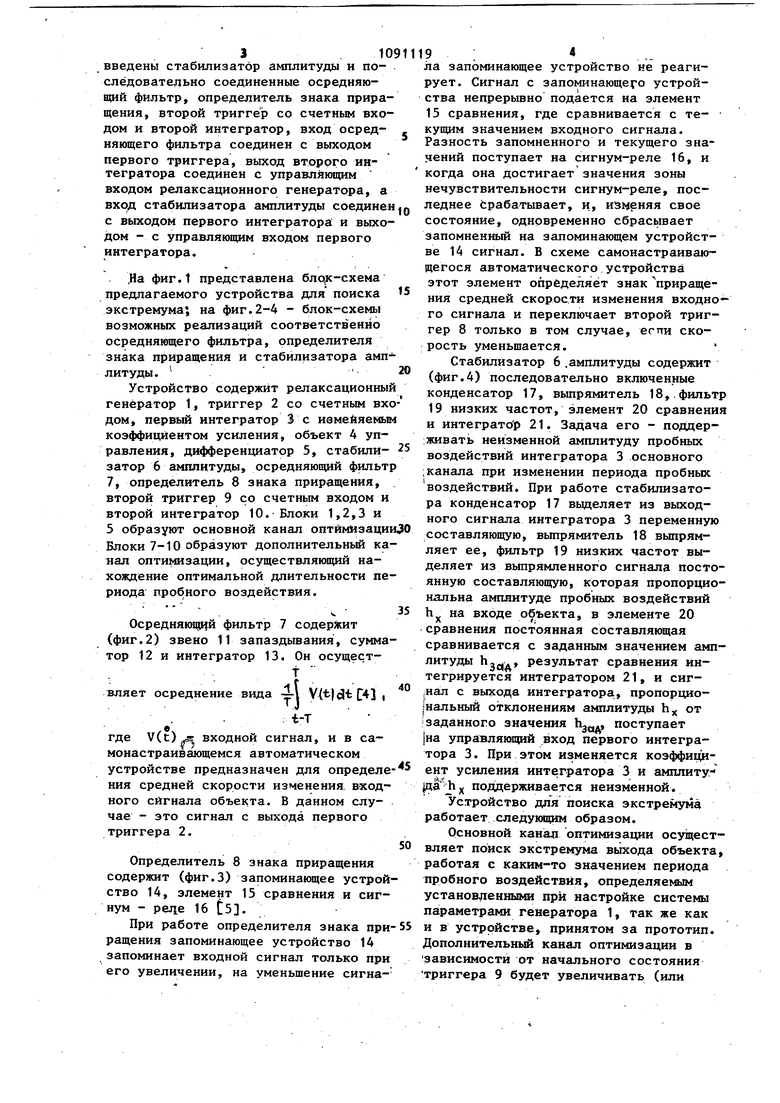
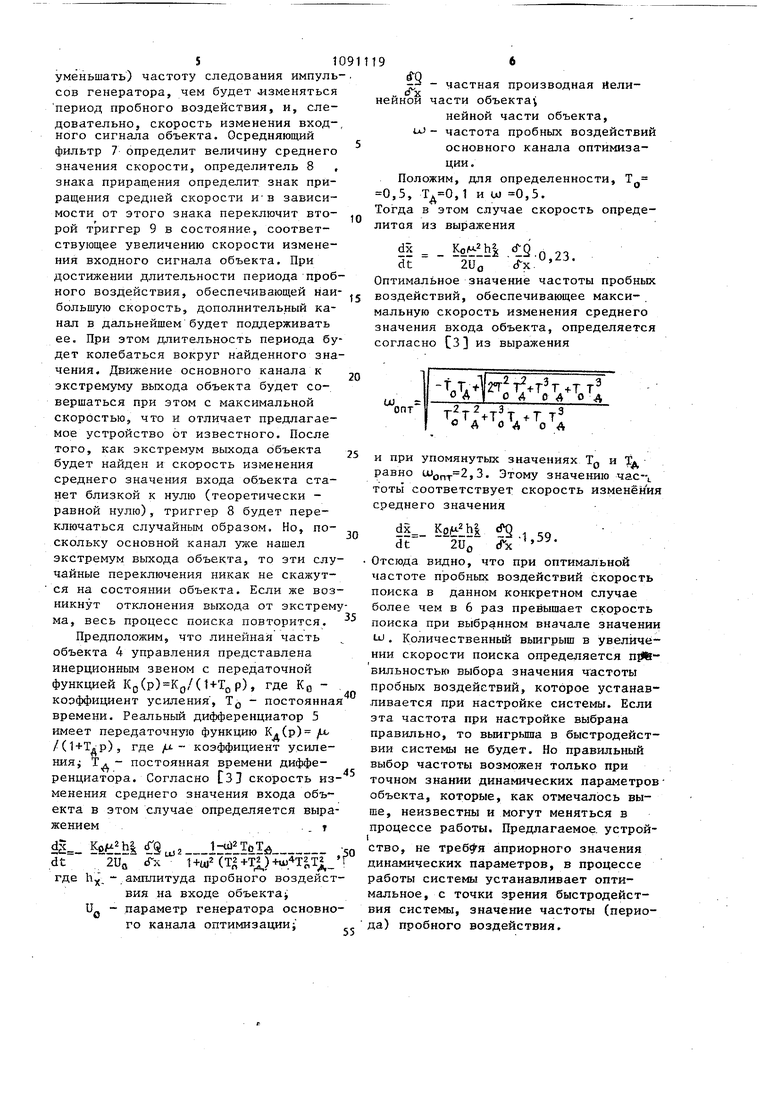
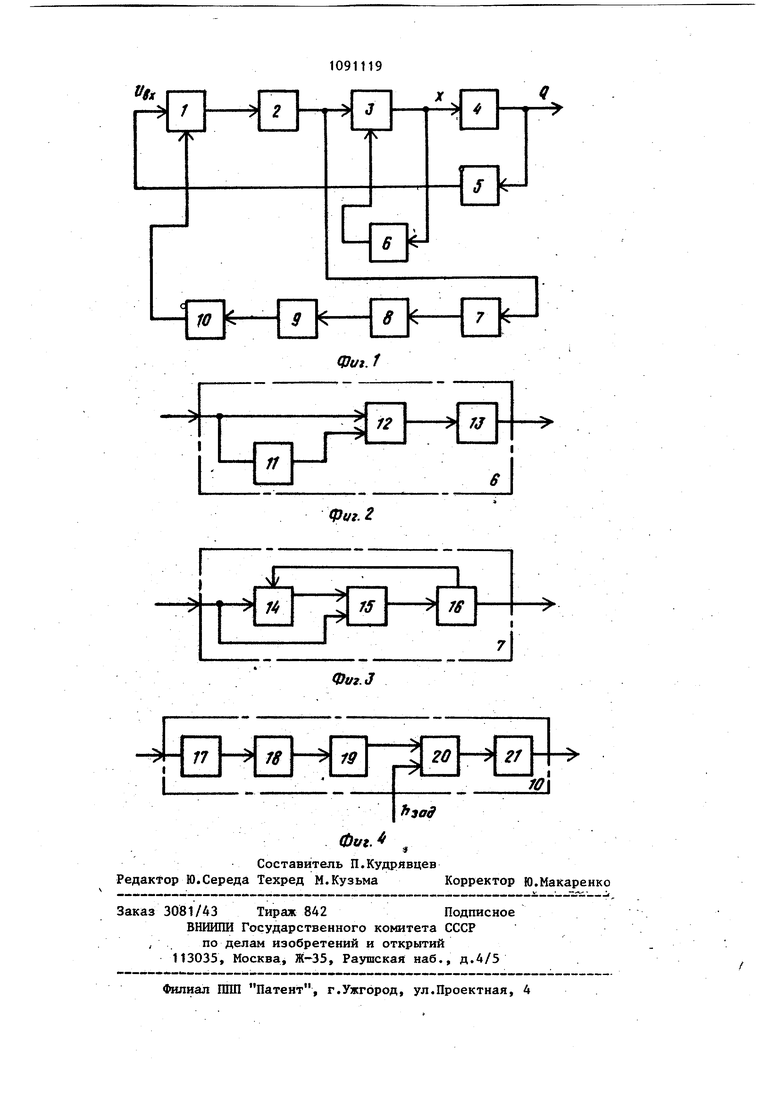
Изобретение относится к автоматинескому управлению, в частности к по исковым устройствам управления нели нейными динамическими объектами, динамические параметры которых заранее .неизвестны или меняются в процессе работы непредвиденным образом. Известно устройство для автоматического поиска экстремума выходной величины одномерного динамического о&ъекта при помощи синхронного детек тирования с адвптацией частоты пробных воздействий Cl Недостатком является то, что в из вестном устрой(тве для повьшенвя быстродействия и обеспечения устойчивой работы системы поиска при оптимизации динамических объектов производит ся изменение частоты модулирующих сигналов таким образом, чтобы фазовый сдвиг в системе был постоянным и равным наперед заданной величине Ч. Величина Ц) определяется динамическими свойствами объекта. Устройство уп равляет частотной в.зависимости от знака реального и заданного значения сдвига фаз, стремясь свести их разность к нулю. При этом необходимо предварительное определение заданног , сдвига фаз, т.е. нужна предварительная информация о динамических свойствах объекта. Поэтому в отсутствие такой информации и при изменении динамических параметров объекта в процессе рабеты, устройство неработоспо собно. Наиболее близким к предлагаемому является устройство автоматического поиска экстремума вькодной величины объекта, содержащее последовательно соединенные релаксационный генератор триггер со счетным входом и интегратор с изменяемым коэффициентом усиления, выход которого соединен с вхо дом объекта управления, и дифференци атор, вход которого подключен к выхо ду объекта, а выход - к входу релаксационного генератора. Это устройств реализует способ автоматического поиска, при котором на вход объекта подается периодический широтно-импульсно модулированный пробный сигнал с периодом и длительностью прямо пропорциональными производной выходного сигнала объекта по времени. При эТом способе входная величина объект на каждом периоде пробного воздействия последовательно, в зависимости 92 от состояния триггера, изменяется в двух .направлениях: приближаясь к точке Х-, соответствующей экстремуму выходного сигнала объекта, и удаляясь от точки Хд . 11р,и этом для постоянной скорости выходного исполнительного устройства время приближения к экстрему гу превышает время удаления от него. В результате входная величина в среднем за период пробного воздействия приближается к х,23. Недостаток указанного устройства состоит в том, что длительность периодов пробного воздействия, задаваемая гейератором, должна предварительно определяться из априорного знания динамических параметров объекта и практически мало изменяется в процессе поиска. В результате этого поиск осуществляется практически с постоянной скоростью изменения среднего значения входного сигнала объекта и при неточном знании динамических параметров объекта или при рх изменении в процессе работы, время, затрачиваемое на достижение экстремума, может оказаться неоправданно большим. В СЗ показано, что при оптимизации динамического объекта скорость изменения среднего значения входного сигнала с изменением длительности периода пробного воздействия не остается постоянной. При сохранении амплитуды пробного воздействия неизменной существует такое значение длительности, при котором эта скорость максимальна. Поэтому в смысле быстродействия, наиболее выгодно осуществлять автоматический поиск с периодом пробных воздействий именно указанного значения. Цель изобретения - повышение быстродействия при заранее не известных или меняющихся динамических параметрах объекта путем автоматического определения наилучшей длительности периода пробного воздействия. Поставленная цель достигается тем, что в устройство для поиска экстремума, содержащее последовательно соединенные релаксационный генератор, триггер со счетным входом и первый интегратор с изменяемым коэффициентом усиления, выход которого соединен с входом объекта управления, и дифференциатор, вход которого подключен к выходу объекта, а выход к входу релаксационного генератора. 310 введены стабилизатор амплитуды и последовательно соединенные осредняющий фильтр, определитель знака приращения, второй триггер со счетным входом и второй интегратор, вход осредняющего фильтра соединен с выходом первого триггера, выход второго интегратора соединен с управляющим входом релаксационного генератора, а вход стабилизатора амплитуды соединен с выходом первого интегратора: и выходом - с управляющим входом первого интегратора. . ,На фиг.1 представлена бло с-схема предлагаемого устройства для поиска экстремума; на фиг.2-4 - блок-схемь возможных реализаций соответственно осредняющего фильтра, определителя знака приращения и стабилизатора амплитуды. Устройство содержит релаксационный генератор 1, триггер 2 со счетным вхо дом, первый интегратор 3 с измейяемым коэффициентом усиления, объект 4 управления, дифференциатрр 5, стабилизатор 6 амплитуды, осредняющий фильтр 7, определитель 8 знака приращения, второй триггер 9 со счетным входом и второй интегратор 10. Блоки 1,2,3 и 5 образуют основной канал оптймйзаци Блоки 7-10 образуют дополнительный ка нал оптимизации, осуществлякиций нахождение оптимальной длительности пе риода пробного воздействия. Осредняющий фильтр 7 содержит (фиг.2) звено 11 запаздьшания, сумма тор 12 и интегратор 13. Он осущестосреднение вида Л V{t|dt 43 где Vtt входной сигнал, и в самонастраивающемся автоматическом устройстве предназначен для определе ния средней скорости изменения входного сигнала объекта. В данном случае - это сигнал с выхода первого триггера 2. Определитель 8 знака приращения содержит (фиг.З) запоминающее устрой ство 14, элемент 15 сравнения и сигнум - pejie 16 СЗ. При работе определителя знака при ращения запоминающее устройство 14 запоминает входной сигнал только при его увеличении, на уменьшение сигна9 ; ла запоминающее устройство не реагирует. Сигнал с запоминающего устройства непрерывно подается на элемент 15 сравнения, где сравнивается с текущим значением входного сигнала. Разность запомненного и текущего значений поступает на сигнум-реле 16, и когда она достигает значения зоны нечувствительности сигнум-реле, последнее Ьрабатывает, и, изменяя свое состояние, одновременно сбрасывает запомненный на запоминающем устройстве 14 сигнал. В схеме самонастраивающегося автоматического устройства этот элемент определяет знак Ъриращения средней скорости изменения входно-го сигнала и переключает второй триггер 8 только в том случае, егпи скорость уменьшается. Стабилизатор 6.амплитуды содержит (фиг.4) последовательно включенные конденсатор 17, выпрямитель 18,.фильтр 19 низких частот, элемент 20 сравнения и интегратор 21. Задача его - поддер:живать неизменной амплитуду пробных воздействий интегратора 3 основного ; канала при изменении периода пробных воздействий. При работе стабилизатора конденсатор 17 выделяет из выходного сигнала интегратора 3 переменную составляющую, вьтрямитель 18 выпрямляет ее, фильтр 19 низких частот выделяет из выпрямленного сигнала постоянную составляющую, которая пропорциональна амплитуде пробных воздействий h на входе объекта, в элементе 20 сравнения постоянная составляющая сравнивается с заданным значением амплитуды , результат сравнения интегрируется интегратором 21, и сиг,нал с выхода интегратора, пропорцио нальный отклонениям амплитуды h от Заданного значения hjQ.., поступает |на управлякноий вход первого интегратора 3. При этом изменяется коэффициент усиления интегратора 3 и амплиту |даh;( поддерживается неизменной. Устройство для поиска экстремзгма работает следующим образом. Основной канал оптимизации осуществляет поиск экстремума выхода объекта, работая с каким-то значением периода пробного воздействия, определяемым установленными при настройке системы параметрами генератора 1, так же как и в устройстве, принятом за прототип. Дополнительн канал оптимизации в зависимости от начального состояния триггера 9 будет увеличивать (или 510 уменьшать) частоту следования импульсов генератора, чем будет изменяться период пробного воздействия, и, следовательно, скорость изменения входного сигнала объекта. Осредняющий фильтр 7 определит величину среднего значения скорости, определитель 8 знака приращения определит знак приращения средней скорости Ив зависимости от этого знака переключит второй триггер 9 в состояние, соответствующее увеличению скорости изменения входного сигнала объекта. При достижении длительности периода проб ного воздействия, обеспечивающей наи большую скорость, дополнительный канал в дальнейшем будет поддерживать ее. При этом длительность периода бу дет колебаться вокруг найденного зна чения. Движение основного канала к экстремуму выхода объекта будет совершаться при этом с максимальной скоростью, что и отличает предлагаемое устройство от известного. После того, как экстремум выхода объекта будет найден и скорость изменения среднего значения входа объекта станет близкой к нулю (теоретически равной нулю), триггер 8 будет переключаться случайным образом. Но, поскольку основной канал уже нашел экстремум выхода объекта, то эти слу чайные переключения никак не скажут ся на состоянии объекта. Если же воз никнут отклонения выхода от экстрем ма, весь процесс поиска повторится. Предположим, что линейная часть объекта 4 управления представлена инерционным звеном с передаточной функцией Ко(р)Ко/(НТор), где Ко коэффициент усиления, Тд - постоянна времени. Реальный дифференциатор 5 имеет передаточную функцию Кд(р) /(ИТдр), где /J- коэффициент усиления j Т л - постоянная времени дифференциатора. Согласно СЗЗ скорость из менения среднего значения входа объекта в этом случае определяется выра жением . - где , амплитуда пробного воздейс вия на входе объектаi и - параметр генератора основн го канала оптимизацииj 96 -- - частная производная йелиейнои части объекта; нейной части объекта, UJ- частота пробных воздействий основного канала оптимизации. Положим, для определенности, 1 0,5, ,1 и U) 0,5. огда в этом случае скорость опредеится из выражения dx t.o 23 dt 2U; x. Оптимальное значение частоты пробных воздействий, обеспечивающее макси- . мальную скорость изменения среднего значения входа объекта, определяется согласно З из выражения nTf-elV -T Т -VA ОД о А о Л +Т Т в А о А о А и при упомянутых значениях Т и Тд равно и),3. Этому значению час- тоты соответствует скорость изменёния среднего значения dx d 5Г 2Uo Отсюда видно, что при оптимальной частоте пробных воздействий скорость поиска в данном конкретном случае более чем в 6 раз превышает скорость поиска при выбранном вначале значении LiJ. Количественный вьшгрыш в увеличении скорости поиска определяется ni БИЛЬНОСТЬК выбора значения частоты пробных воздейетвий, которое устанавливается при настройке системы. Если эта частота при настройке выбрана правильно, то выигрьшта в быстродействии системы не будет. Но правильный выбор частоты возможен только при точном знании динамических параметров объекта, которые, как отмечалось выше, неизвестны и могут меняться в процессе работы. Предлагаемое, устройство, не требуя априорного значения динамических параметров, в процессе работы системы устанавливает оптимальное, с точки зрения быстродействия системы, значение частоты (периода) пробного воздействия.
1091119
%
r- «У
4
| название | год | авторы | номер документа |
|---|---|---|---|
| Экстремальная система управления | 1984 |
|
SU1241191A1 |
| Многоканальный автоматический оптимизатор | 1978 |
|
SU746417A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| Система управления инерционным экстремальным объектом | 1986 |
|
SU1456930A1 |
| Многоканальный автоматический оптимизатор | 1978 |
|
SU769490A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Устройство экстремального регулирования | 1982 |
|
SU1049865A1 |
| Система экстремального регулирования | 1981 |
|
SU1056132A1 |
| Способ управления в пьезополупроводниковых преобразователях и устройство для его осуществления | 1977 |
|
SU739500A1 |
| МНОГОКАНАЛЬНОЕ АВТОМАТИЧЕСКОЕ УСТРОЙСТВО | 1973 |
|
SU388245A1 |
УСТРОЙСТВО ДЛЯ ПОИСКА ЭКСТРЕМУМА, содержащее последовательно соединенные релаксационный генератор, первый триггер со счетным входом и первьШ интегратор с изменяемым коэффициентом усиления, выход которого соединен с входом объекта управления, и дифференциатор, вход которого подключен к выходу объекта, а выход к входу релаксационного генератора, о т л и ч а ю щ е е с я тем, что, с целью повьшения его быстродействия при заранее не известных или меняю-, щихся динамических параметрах объекта путем автоматического определения § наилучшей длительности периода пробного воздействия, в него введены ста(Л билизатор амплитуды и последовательно соединенные осреднякнций фильтр, определитель знака приращения, второй триггер со счетным входом и второй интегратор, вход осредняющего фильтра соединен с выходом первого триггера, выход второго интегратора соединен с дУправляю щим входом релаксационного со генератора, а вход стабилизатора амплитуды соединен с выходом первого интегратора и выходом - с управляющим входом первого интегратора. i;o
9
W
Фиг.1
Фиг. Z
Фиг.З
