висимо от начального отклонения выходного сигнала объекта от экстремального значения изменение входного сигнала при движении к точке Хэ происходит фактически с постоянной средней скоростью, так как период пробного воздействия в процессе поиска меняется незначительно. Это обстоятельство удлиняет процесс поиска во времени, не позволяет получить существенно пропорциональный подход к точке Хэ, приводит к неоправданно большим колебаниям на входе объекта по достижении экстремума и поддержании его в установившемся режиме.
Цель изобретения - убыстрение продесса поиска, получение пропорционального приближения к точке экстремума и уменьшение колебаний, подаваемых на входы ооъекта в установившемся режиме, что повышает точность поиска.
Поставленная цель достигается тем, что амплитуду пробных сигналов в момент времени, соответствуюш,ий началу периода пробного воздействия, изменяют пропорционально амплитуде выходного сигнала при поиске минимума и пропорционально разности между постоянным сигналом н выходным сигналом при поиске максимума, причем величину постоянного сигнала выбирают больше выходного сигнала, а амплитуду поддерживают постоянной в течение всего периода пробного воздействия, достигается сокраш,ение времени процесса поиска, пропорциональность подхода к точке экстремума и уменьшение колебаНИИ на входе объекта в установившемся режиме работы. При поиске экстремума функции нескольких переменных амплитуду пробных сигналов по каждой переменной изменяют в момент времени, соответствуюш,ий началу периода пробного воздействия по данной переменной, и поиск по всем переменным ведут одновременно.
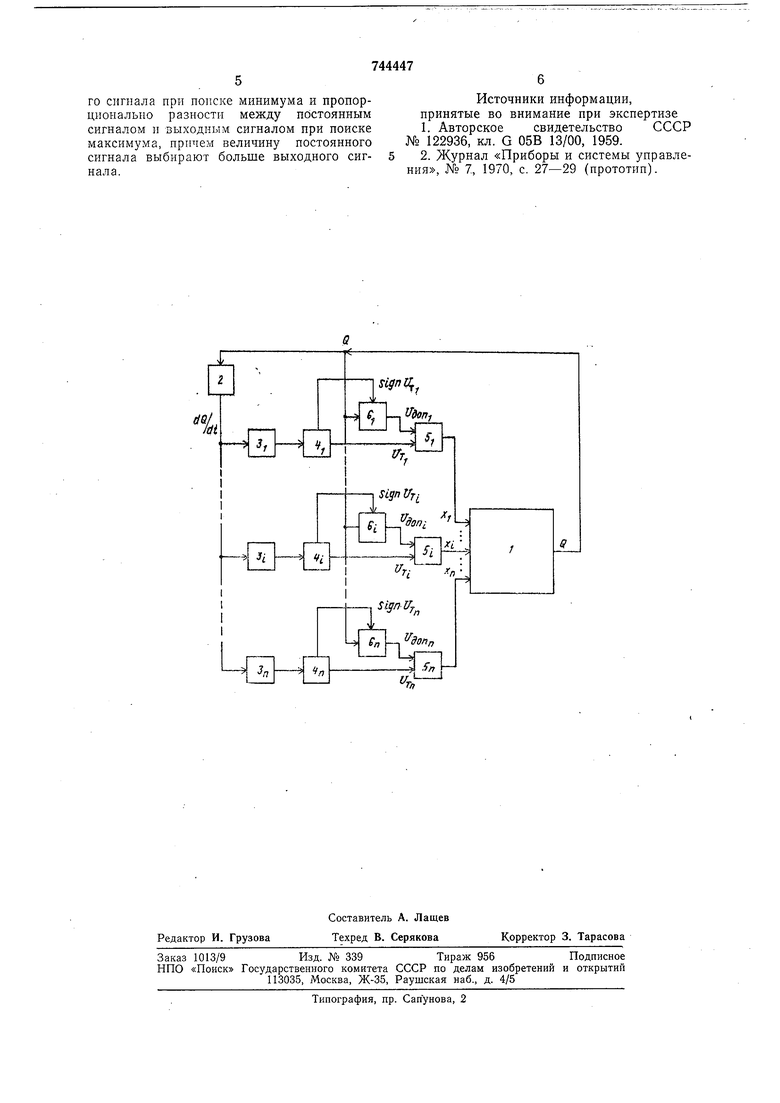
На чертеже представлена блок-схема системы автоматического поиска, реализуюш,ей предлагаемый способ.
Выходной сигнал Q объекта 1 является функцией п входных переменных Xi, ..., ХпПосле дифференцирования Q дифференциатором 2 производная dQIdt поступает на входы всех генераторов 3i, ..., Зп импульсов, которые управляют триггерами 4i, ..., 4п. Широтно-импульсно модулированные сигналы с выхода каждого триггера поступают на соответствующие выходные интегрирующие звенья 5i, ..., 5п. Генератор Зг импульсов, триггер 4{ и выходное интегрирующее звено 5г образуют один канал многоканального оптимизатора. На выходные интегрирующие звенья 5i, ..., 5п каналов оптимизатора, кроме сигналов U с выходов соответствующих триггеров подаются дополнительные сигналы f/допг Ki-Qsign-t/T; с блоков 61, ..., 6n, которые кроме
операции перемножения поддерживают значения Unoai неизменными в течение одного периода пробного воздействия и пропорциональными значению сигнала Q в момент времени, соответствующий началу периода пробного воздействия в каждом канале соответственно. Значение f/доп изменяют дискретно от периода к периоду пробного воздействия в соответствии с изменением сигнала Q. Необходимость поддержания неизменным значения Сдоп; в течение периода пробного воздействия вызывается тем, что непрерывно изменяющийся сигнал t/доп; внес бы искажения в работу
автоматического оптимизатора с широтноимпульсной модуляцией, которые затруднили бы поиск экстремума.
Если коэффициенты /Ci выбрать близкими к единице, то можно уменьЩйть значения сигналов i/Ti и тогда при поиске минимума
Q по достижении (в частном случае может оказаться, что ) амплитуда пробных сигналов, подаваемых на каждый вход объекта, будет изменяться от значительной величины в начале процесса поиска, когда Q велико, до небольшой величины в установившемся режиме, когда Q мало, и вся амплитуда определяется сигналом t/T; Если требуется находить максимальное значение сигнала Q с выхода объекта, то дополнительные сигналы с блоков 6i 6и должны иметь вид
,i(U,Q)signU,,
где постоянный вспомогательный сигнал UQ должен выбираться заведомо большим, чем Q.
Благодаря введению дискретно изменяемой от периода к периоду пробного воздействия амплитуды пробных сигналов, зависящей от значения выходного сигнала объекта Q, сокращается время процесса поиска, достигается пропорциональность подхода к точке экстремума (средняя скорость движения в начале процесса поиска значительна, а затем понижается) и уменьшается амплитуда колебаний, подаваемых на входы объекта в установившемся режиме, что и отличает предлагаемый способ от известного решения.
Формул а изобретения
Способ поиска экстремума, основанный на формирование периодических широтноимпульсно модулированных пробных сигналов управления, период и длительность которых изменяют пропорционально производной выходного сигнала, отличающийся тем, что, с целью повышения быстродействия и точности поиска, амплитуду пробных сигналов управления изменяют пропорционально амплитуде выходного сигнала при поиске минимума и пропорционально разности между пбстоянным сигналом и выходным сигналом при поиске максимума, причем величину постоянного сигнала выбирают больше выходного сигнала.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 122936, кл. G 05В 13/00, 1959.
2.Журнал «Приборы и системы управления, № 7, 1970, с. 27-29 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| Экстремальная система управления | 1984 |
|
SU1241191A1 |
| Многоканальный автоматический оптимизатор | 1978 |
|
SU746417A1 |
| Устройство для поиска экстремума | 1983 |
|
SU1091119A1 |
| Устройство экстремального регулирования | 1982 |
|
SU1049865A1 |
| Способ определения комбинаторной зависимости поворотно-лопастной гидротурбины | 1982 |
|
SU1078119A1 |
| АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР ДЛЯ УПРАВЛЕНИЯ СЕПАРАТОРОМ | 1970 |
|
SU282046A1 |
| Автоматический оптимизатор | 1958 |
|
SU122936A1 |
| Многоканальный автоматический оптимизатор | 1978 |
|
SU769490A1 |
| СПОСОБ ПОИСКА ЭКСТРЕМУМА СТАТИСТИЧЕСКОЙ ХАРАКТЕРИСТИКИ ИНЕРЦИОННОГО ОБЪЕКТА | 2011 |
|
RU2471220C1 |
