(54) СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электродвигатель | 1980 |
|
SU902164A1 |
| Однофазный шаговый электродвигатель | 1984 |
|
SU1365276A1 |
| Способ управления двухфазным шаговым электродвигателем с несимметричными полюсами | 1984 |
|
SU1274115A1 |
| Способ настройки моментного вентильного электродвигателя | 1985 |
|
SU1275677A1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402148C1 |
| Однофазный синхронный электродвигатель | 1985 |
|
SU1379899A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1030929A1 |
| Шаговый двигатель | 1983 |
|
SU1164831A1 |
| Однофазный шаговый электродвигатель | 1983 |
|
SU1095324A1 |
| Шаговый коммутатор с жидкостной контактной системой | 1983 |
|
SU1206852A1 |
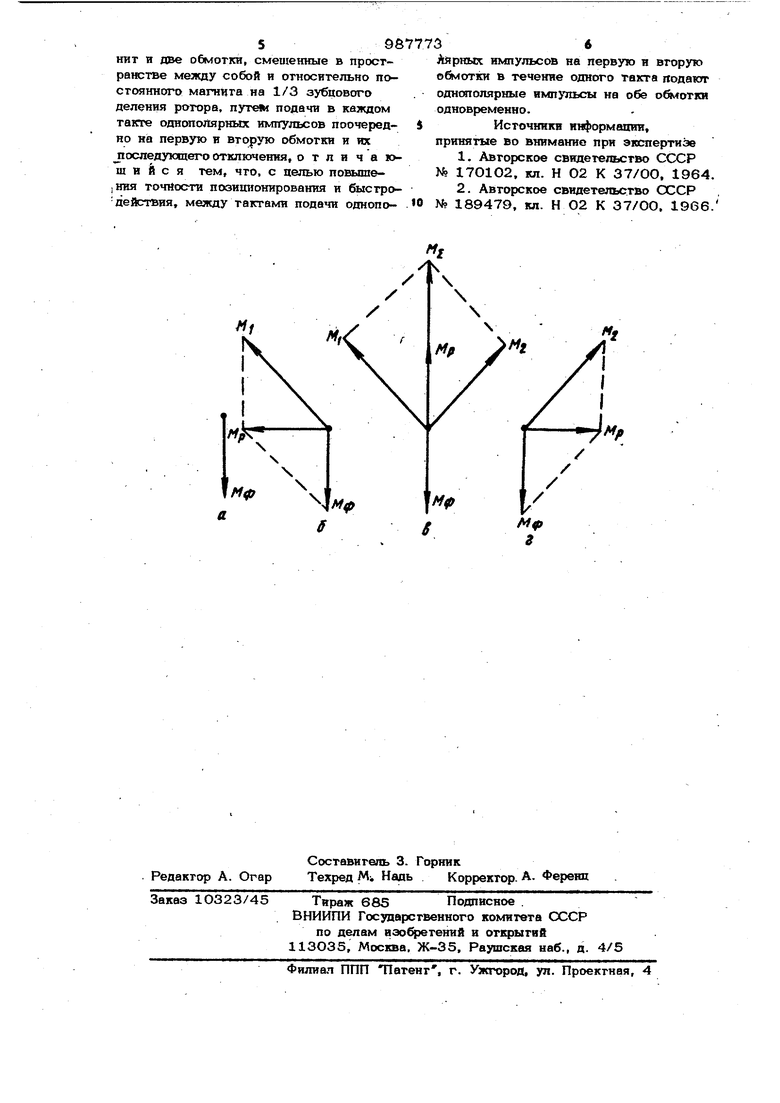
Изобретение относится к электротехнике, в частности к управлению шаговыми двигателями, и может &лть использо вано в установках с шаговыми двигателями, требужлдими отключения питания в режиме позиционирования. Известен способ управления шаговым двигателем с отдельными специальными фиксирующими устройствами, обеспечиваю щий отключение фиксирующего устройст ва на время работы шагового двигателя посредствоми подачи напряжения на уп равяякхцую обмотку фиксирующего устройства С1 7 . Недостатком этого способа управления является увеличение энергопотребления шагового двигателя иэ-за потери : энергии в обмотке фиксатора. Наиболее близкий к изобретению способ управления шаговым двигателем с безо&лоточным зубчатым poTopt, статор которого содержит постоянный магнит и две обмотки, смешенные в прост- ;ранстве между собой и относительно постоянного магнита, образующего третью магнитную фазу на 1/3 зубцоврго деления ротора, обеспечивает перемешение ротора ттутем подачи однополярных импульсов только на тгервую o&rfOTKy, затем только на вторую обмотку и последующего откл1очения обмоток. Коммутация каждой фазы вызывает последовательный поворот ротора шагового двигателя на угол около 120 эл. град. Отключение питания обеих фаз вы ялвает поворот ротора шаговсяго двигателя еше на угол, близкий к ., 12О эп. град, за счет момента фиксирутошей магнитной фазы. Далее цикл повторяется. Недостатком известного способа управления шаговым двигателем является - епос тонне тво амплитуды двнжушего момен-. та шагового двигателв, вызванное тем, -что поворот ротора на угол, блвэкнй к 12О эл. град, прн каждом переключении обмоток возмо(жен при значительном пре вышении момента каждой фазы шаговогч сирующей фазы. Реагаьно в двигателях такой конструкции это превьпиение соста ляет 3-4. Поэтому с учетом постоянного действия магнитной фазы даже при включенных электрических фазах углы поворота ротора в гсикле коммутации распределяются неравномерно. Это при водит к снижению точности позиционирования и уменьшению быстродействия шагового двигателя. Цель изобретения - повышение точнос ти позиционирования н быстродействия шагового двигателя. Указанная цель достигается тем, что согласно способу управления шаговым двигателем с безобмоточным зубча тым ротором к статором, содержашим постоянный магнит и две обмотки, сме.щенные в пространстве между собой и относительно постоянного магнита на 1/3 зубцового деления ротора, путем подачи в каждом такте однополярных им , пульсов поочередно на первую и вторую об.мотк-и и последующего их отключения, между такта га подачи однополярных им пульсов на первую и вторую обмотки в течение одного такта подают однополяргшге импульсы на обе обмотки одновременно. На фиг. 1 показаны векторные диагр мы моментов шагового двигаТе)тя при . различных тактах коммутации. Способ управления шаговым двигате лем заключается в следуюшем При обесточенных обмотках управления (фазах) шагового двигателя фиксир щая фаза, возбуждаемая постоянным ма нитом, развивает фиксируюший момент Мф (фиг. 1а): Подача однрполярного им пульса управления на одну из фаз, напр мер первую,вызывает появление момент М (фиг. 1&), который, складьгоаясь с моментом фиксирующей фазы Мф вызывает смещение магнитной оси статора Шагового двигателя. Для равномерного. врошенйя ротора шагового двигателя уг перемещения магнитной оси двигателя при калсдом переключении фаз должен быть одинаковым. В рассматриваемом случае четырехтактной коммутации это угол должен составлять 9О эл. град. Результирукщий момент двтггателя Мр должен менять свою амплитуду в целях предатврашения раскачивания ротора в процессе движения, которое приводит к снижению быстродействия двигателя. Для выполнения поставленных условий пр подаче иктульса управления на фазу ивать кратность моментов управляющих аз и фиксируюшей фазы равной УЗ фиг. 16). При этом магнитная ось стаора поворачивается строго на 9Оэл.град.; амплитуда фиксирующего момента Мф авна амплитуде результирузсщего момена Мр Подача импульсов управления на бе фазы двигателя обеспечиваетследуюий поворот магнитной осистатора, а вмесе с ней и ротора шагового двигателя, на 0 эл. град. {фиг. 1в). Суммарный моент фаз двигателя Mr-имеет амплитуду, двое превосходящую амплитуду момента иксируюшей фазы Мф. При этом вследстие противоположной направленности моентов Mr- и Мф результируклдий моент двигателя Мр равен по алятлитудеМ }, i:-V% Подача импульса управления только на вторую фазу вызывает очередной поворот магнитной оси статора на 90 эл. град. (фиг. 1г). Затем отключение питания обеих фаз вызьгоает поворот магнитной оси статора На последние в данном цикле 90 эл. град, до совпадения с магнитной осью фиксируюшей фазы. При этом результирующий момент двигате/ШМр соответствует моменту фиксирующей фазы Мф. Далее цикл-повторяется. Предлагаемый способ управления шаговым двигателем с магнитной фиксацией ротора, обеспечивает высокую равномерность движения ротора, так как за равные промежутки времени вектор результируюшего момента шагового двигателя поворачивается на одинаковый электрический угол 90 эл. град. Это позволяет достичь высокой точности позиционирования двигателя. Неизменность амплитуды момента Мр обеспечивает плавность движения ротора шагового двигателя. Предлагаемый способ управления позволяет достичь более высокого быстродействия шагового двигателя с магнитной фиксацией ротора по сравнению с быстродействием шагового двигателя без фиксации. Формула изобретения Способ управления шаговым двигателем с безобмоточным зубчатым ротором и статором, содержащим постояшплй маг
нит и две обмотки, смеиюнные в прсжтранстве между собой и относительно постоянного магнита на 1/3 зубцового деления ротора, путе1И подачи в каждом такте однополярных ш птульсов поочередно Hia первую и вторую обмотки и их доследующего отключения, отличаюш и {I с я тем, что, с целью повыше|Ш1я точности позиционирования и быстро действия, между тактами подачи однопоАярных импульсов на первую и вторую обмотки в течение одного такта подают однополярные импульсы на обе охотки одновременно.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР
№ 17О1О2, кл. Н О2 К 37/00, 1964.
№ 189479, кл. Н 02 К 37/ОО, 1966.
