(5) ГИДРАВЛИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический позиционный привод | 1988 |
|
SU1668746A1 |
| Гидравлический позиционный привод | 1988 |
|
SU1541422A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| Следящий привод | 1982 |
|
SU1060821A1 |
| Дискретный гидропривод | 1981 |
|
SU989171A1 |
| Гидравлический позиционный привод | 1987 |
|
SU1460436A2 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| Гидравлический позиционный привод | 1985 |
|
SU1280207A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ И РАБОЧАЯ СЕКЦИЯ СЕКЦИОННОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2320902C2 |
1
Изобретение относится к машиностроению, а именно к гидроприводам исполнительных органов машин, и может быть использовано, например, в станкостроительной промышленности для безупорной остановки исполни тельного органа в заданной координате.
Известен гидравлический позиционный привод, содержащий гидродвигатель с выходным звеном, кинематически связанным с крановым дросселирующим гидрораспределителем, регулятор потока, включающий корпус с установленным в нем золотником с образованием двух торцовых полостей, одна из которых беспружинная, и дроссель, магистрали нагнетания и слива Fl.
Недостатками известного устройства являются сложность схемы привода, низкая скорость подхода исполнительного органа к заданной координате и недостаточная точность позиционирования. Указанные недостатки
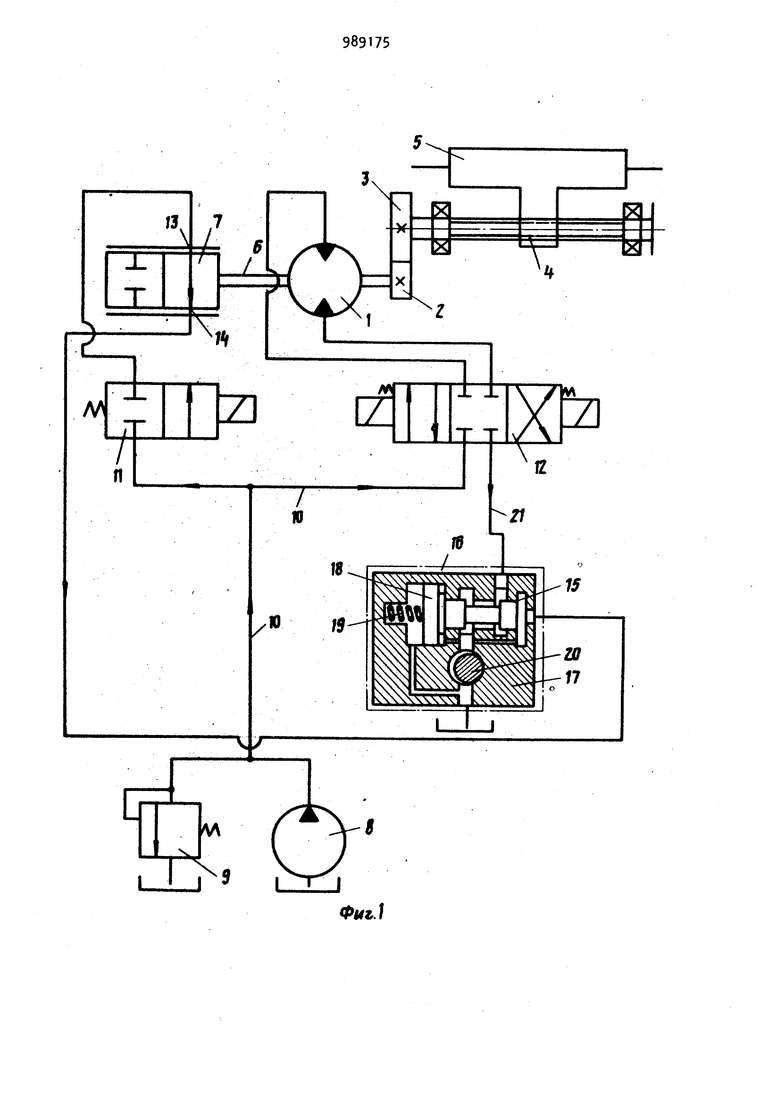
обусловлены тем, то управляющее тормозное устройство, выполненное в виде последовательно соединенных осевого и кранового дросселирующих гидрораспределителей, не обеспечивает стабильность времени срабатывания гидропривода, а схема гидропривода с регулятором потока, установленным на напорной линий, не обеспечивает достаточной кинематической жесткости привода, особенно при малых ползучих скоростях. Помийо этого, при больших скоростях подхода исполнительного органа к заданной координате происходит резкое срабатывание осевог го дросселирующего гидрораспределителя, сопровождаемое резкими коле:баниями давления в системе, вызывая нежелательные скачкообразные движения исполнительного органа, что также снижает точность позиционирования. Кроме того, технология изготовления осевого дросселирующего гидрораспределителя сложна и трудоемка. Цель изобретения - расширение функциональных возможностей и упрощение конструкции привода. Поставленная цель достигается тем, что гидравлический позиционный привод, содержащий гидродвигатель с выходным звеном, кинематически связанным с крановым дросселирующим гидрораспределителем, регулятор потока, включающий корпус с установленным в нем золотником с образованием двух торцовых полостей, одна из которых беспружинная, и дроссель, магистрали нагнетания и слива, регулятор потока установлен в магистрали слива, а его беспружинная торцовая полость связана с выходом кранового дросселирующего гидрораспределителя. На фиг. 1 приведена принципиальная схема позиционного привода; на фиг.2конструктивная схема кранового дросселирующего гидрораспределителя, Гидравлический позиционный привод (фиг, 1) содержит гидродвигатель 1, связанный через зубчатые колеса 2 .и 3 и передачу k винт-гайка с исполнительным органом 5 а выходным звеном 6 с крановым дросселирующим гидрораспределителем 7 насос 8 с предохранительным клапаном 9 связанный магистралью 10 нагнетания с гидрораспределителями 11 и 12. Крановый дросселирующий распределитель своим входом 13 сообщается с распределителем 11 и выходом 14 с беспружинной торцовой полостью 15 регулятора 16 потока, включающего также корпус 17 и установ ленный в нем золотник 18 с образованием пружинной полости 19 и дроссель 20. Регулятор потока 16 расположен в магистрали 21 слива.
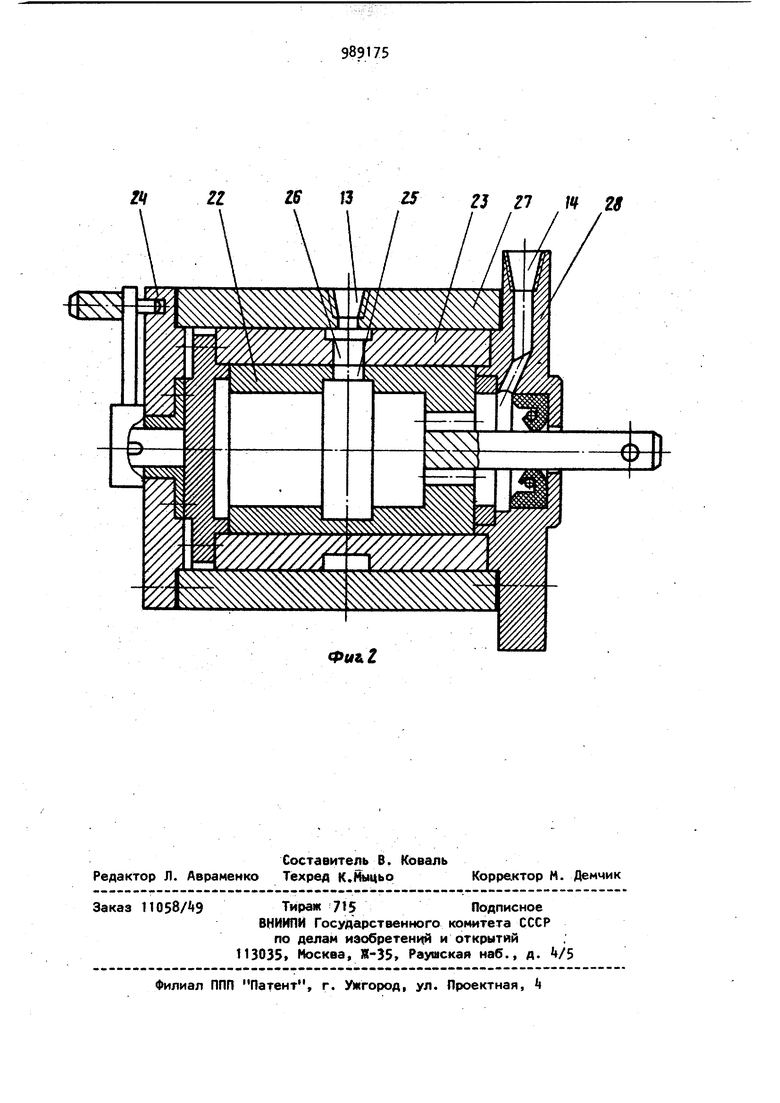
Крановый дросселирующий гидрораспределитель 7 (фиг. 2) включает кранпробку 22, кинематически связанную с выходным звеном 6 (фиг. 1), установочную гильзу 23 с жестко закрепленной на ней лимб-крышкой 24. Кранпробка 22 и гильза 23 имеют осевые рабочие щели 25 и 2б и помещены в корпусе 27 с входом 13 (фиг. 1 и 2) для подвода рабочей среды.
С одного торца корпус 27 закрыт лимб-крышкой 24, а с другого торца крышкой 28 с выходом 14 (фиг. 1 и 2). Привод работает следующим образом. 55 Рабочая среда от насоса 8 по магистрали 10 нап етания через гидрораспределитель 12 подается в гидро98
ются. Гидрораспределитель 12 и гидрораспределитель 11 отключаются. Таким образом регулятор 16 потока кроме основной своей функции регулирования и стабилизации скорости исполнительного органа 5 выполняет дополнительную функцию - распределителя (как в прототипе, осевой дросселирующий гидрораспределитель)..
В дальнейшем по лимб-крышке 24 угловым смещением гильзы 23 задается следующая координата. С включением гидрораспределителя 12 повторяется 54 двигатель 1. Гидродвигатель 1 через зубчатые колеса 2 и 3 и передачу винт-гайка обеспечивает перемещение исполнительного органа 5 и через выходное звено 6 кран-пробки 22 кранового дросселирующего гидрораспределителя 7. Слив рабочей среды с гидродвигателя 1 осуществляется по магистрали 21 слива через гидрораспределитель 12 и регулятор 1б потока и его дроссель 20. В процессе работь) золотник 18 регулятора 16 потока, автоматически устанавливаясь, поддерживает низкий постоянный перепад давления на дросселе 20, что обеспечивает постоянный расход и стабильную скорость перестановки исполнительного органа 5В дальнейшем при подходе к заданной координате за один оборот вала гидродвигателя 1 до его останова срабатывает гидрораспределитель 11, обеспечивая подвод рабочей среды по магистрали 10 нагнетания на вход 13 кранового дросселирующего гидрораспределителя 7 корпуса 27. В момент прихода исполнительного органа 5 на заданную координату совмещаются рабочие щели 25 и 26 кранапробки 22 и гильзы 23 кранового дросселирующего гидрораспределителя 7Управляющее давление с кранового дросселирующего гидрораспределителя 7 через выход 14 в крышке 28 подводится в беспружинную торцовую полость 15 регулятора 16 потока, обеспечивая перемещение егЬ золотника 18 и перекрытие слива рабочей среды, поступающей от гидрораспределителя 12. В результате гидродвигатель 1 и исполнительный орган 5 останавливацикл в соответствии с описанным. Предлагаемое техническое решение, заключающееся в прямом перекрытии регулятора 16 потока управляющим дав59
лением непосредственно с кранового дросселирующего гидрораспределителя 7, позволяет повысить точность позиционирования исполнительного органа 5 за счет повышения устойчивости привода при ползучих скоростях и быстродействия срабатывания привода в момент останова, а также сократить время позиционирования путем повышения скорости подхода к заданной координате. Кроме того, за счет упрощения схемы привода и управляющего устройства снижается стоимость привр да.
Применение предлагаемого привода в комплексе кузнечно-прессового оборудования с числовым программным уп.равлением для резки и пробивки отверстий профильного материала предполагает сократить штучное время обработки на 10-15 и трудоемкость обработки всей номенклатуры обрабатываемых изделий.
75
Формула изобретения
Гидравлический- позиционный привод, содержащий гидродвиг тель с выходным звеном, кинематически связанным с крановым дроссели(ующим гидро.распределителем, регулятс) потока, включающий корпус с установленным в I нем золотником с образованием двух ;торцовых гюлостей, одна из которых ;беспружинная, и дроссель, магистрая нагнетания и слива, отличающ и и с я тем, что, с целью расширения функц 4ональных возможностей и упрощения конструкции, регулятор потока установлен в магистрали слива, а его беспружинная торцовая полость связана с выходом кранового дросселирующего гидрораспредеяителя.
Источники информации, принятые во внимание при экспертизе
.1 Фиг,1 fJ П Ш Z9
