(5) КУЛАЧКОВЫЙ МЕХАНИЗМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм возвратно-поступательного движения с уравновешиванием сил инерции | 1977 |
|
SU771387A1 |
| Устройство для разгрузки механизма | 1973 |
|
SU539195A2 |
| Привод талера плоскопечатной машины | 1978 |
|
SU719894A1 |
| РУЧНОЙ ИНСТРУМЕНТ ДЛЯ РАСПИЛОВКИ ПРЕИМУЩЕСТВЕННО МЯСНЫХ ТУШ | 1996 |
|
RU2107438C1 |
| Устройство для ограничения колебаний угловой скорости валов механизмов | 1982 |
|
SU1036992A1 |
| Устройство для уравновешивания маль-ТийСКиХ МЕХАНизМОВ | 1979 |
|
SU823711A2 |
| Кулачковый механизм | 1971 |
|
SU406479A1 |
| КРИВОШИПНЫЙ ПРЕСС | 1992 |
|
RU2028944C1 |
| Механизм привода печатного аппарата плоскопечатной машины | 1974 |
|
SU536989A1 |
| КОМПРЕССОР ПОРШНЕВОЙ С КУЛАЧКОВЫМ РАБОЧИМ МЕХАНИЗМОМ | 1997 |
|
RU2132485C1 |
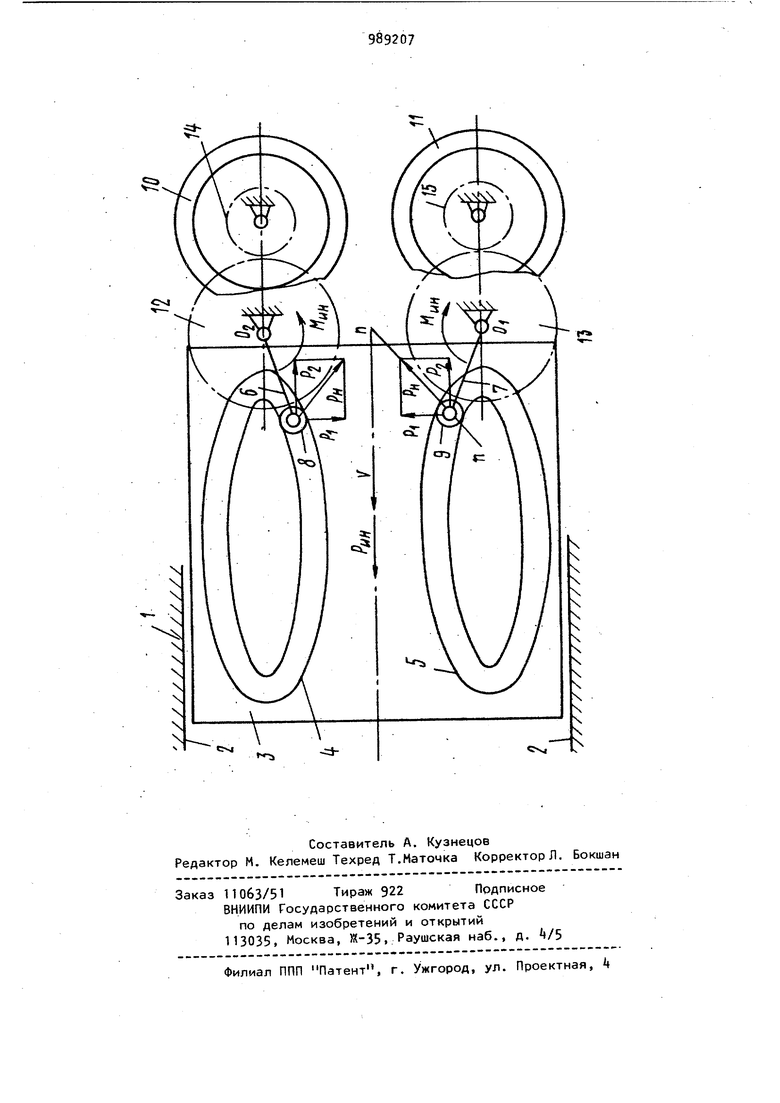
Изобретение относится к машиностроению и может быть использовано в цикловых машинах-автоматах с быстрот ходными реверсируемыми массами, в частности в плоскопечатных машинах для уравновешивания сил инерции стола. Известен кулачковый механизм, содержащий корпус, установленный в нем ползун, закрепленные на корпусе два нагружателя, попарно соединенные дру с другом рычаги, один из которых вза имодействует с нагружателями, а на других установлены ролики, два кулач ка с одинаковыми профилями, зеркальн расположенные относительно оси симметрии ползуна и взаимодействующие с роликами, а нагружатели выполнены в виде пневмоцилиндров и поршней, соединенных с рычагами Г. Недостатком известного механизма является то, что в нем силы инерции могут быть уравновешены только при движении ползуна по симметричному комбинированному закону, при котором силы инерции возникают только в крайних положениях. Наиболее близким к изобретению по технической сущности и достигаемому результату является кулачковый механизм, содержащий корпус с направляющими, установленный в нем ползун, размещенные на ползуне симметрично его оси кулачки с одинаковым профилем, установленные с возможностью вращения относительно корпуса рычаги с роликами, взаимодействующими с торцовыми кулачками, и разгружатели 2J. Недостатком данного механизма является невысокая точность закона перемещений ползуна за счет неполного уравновешивания сил инерции при различных режимах работы устройства. Цель изобретения - повышение точности закона перемещений ползуна за счет уравнО8е1аивания сил инерции. Указанная цель достигается тем, что в кулачковом механизме, содержащем корпус с направляющими,установленный 8 нем ползун, размещенные на ползуне симметрично его оси кулачки с одинаковым профилем, установленные с возможностью вращения от носительно корпуса рычаги с роликами взаимодействующими с кулачками, и разгружатели, кулачки выполнены пазовыми, разгружатели - в виде инерционных масс, а механизм снабжен зуб чатыми передачами, одни элементы которых связаны с рычагами, а другие с инерционными массами. На чертеже изображена схема предложенного кулачкового механизма. Кулачковый механизм содержит ко рпус 1с направляющими 2, установленный в нем ползун 3, разме1ценные на ползуне 3 симметрично его оси кулачки ij и 5 с одинаковым профилем, установленные с возможностью вращения относительно корпуса 1 рычаги 6 и 7 с роликами 8 и 9 взаимодействующими с кулачками + и 5, разгружатели 10 и 11 в виде инерционных масс. Кулачки и 5 выполнены пазовыми. Также в корпусе 1 механизма установлены зубчатые передачи, одни элементы 12 и 13 которых связаны с рычагами 6 и а другие 1 и 15 с инерционными массами 10 и 11. Кулачковый механизм работает следующим образом. Ползун 3 совершает возвратно-поступательное движение. Сила инерции массы ползуна 3 при его перемещении, из одного крайнего положения в другое от максимума уменьшается, достигая нулевого значения, а затем меняет направление и снова увеличивается до максимума. При силе инерции массы ползуна 3 равной нулю (соответствующей его максимальной скорости ) моменты сил инерции от 0азгружателей 10 и 11 так же равны нулю. Этим двум фазам движения ползуна 3 (при прямом и обратном ходе ) соответствуют два крайних положения каждого из рычагов 6 и 7. Дальнейшее перемещение ползуна 3 через кулачки St рычаги 6 и 7 и Зубчатые передачи 12, 1 и 13, 15 вызывает ускоренное вращение разгружателей 10 и 11. При этом моменты сил инерции М на рычагах 6 и 7 от разгружателей 10 и 11 создают нормальные силы Р на профили, кулачков и 5 которые можно заменить составляющими PJ и Р/2 . Силы Р , как равные и противоположно направленные, на массу ползуна 3 влияние не оказывают, а продольные составляющие Р суммируются и уравновешивают равные им силы инерции Р ползуна 3. Крайнему положению ползуна 3 соответствует наибольший момент сил инерции от разгружателей 10 и 11, после чего ролики 8 и Э переходят на противоположные участки профилей кулачков 4 и 5. С изменением направления движения ползуна 3 скорость вращения разгружателей 10 и 11 начинает уменьшаться, моменты сил инерции Н| на рычагах 6 и 7 изменяют направление и сумма продольных составляющих Р,, преодолевает равные им силы инерции Ру ползуна 3, способствуя его разгону до максимальной скорости, когда РИН 0. Предложенный кулачковый механизм обеспечивает полное уравновешивание сил инерции при установившемся движении ползуна и при изменении его скорости движения не требуется подналадки устройства. Формула изобретения Кулачковый механизм, содержащий корпус с направляющими, установленный в нем ползун, размещенные на ползуне симметрично его оси кулачки с одинаковым профилем, установленные с возможностью вращения относительно корпуса рычаги с роликами, взаимодействующими с кулачками, и разгружатели, отличающийс я тем, что с целью повышения точности закона перемещения ползуна за счет уравновешивания сил инерции, кулачки выполнены пазовыми, разгружатели - в виде инерционных масс, а механизм снабжен зубчатыми передачами, одни элементы которых связаны с рычагами, а другие - с инерционными массами. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № , кл. В F 3/78, 1958. 2.Авторское свидетельство СССР W 771387, кл. F 16 Н 25/04, 1977 (прототип).
