(54) МЕХАНИЗМ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ С УРАВНОВЕШИВАНИЕМ СИЛ ИНЕРЦИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Кулачковый механизм | 1981 |
|
SU989207A1 |
| Устройство для уравновешивания маль-ТийСКиХ МЕХАНизМОВ | 1979 |
|
SU823711A2 |
| Устройство для амортизации сил инерции реверсируемых масс | 1981 |
|
SU1010345A1 |
| РУЧНОЙ ИНСТРУМЕНТ ДЛЯ РАСПИЛОВКИ ПРЕИМУЩЕСТВЕННО МЯСНЫХ ТУШ | 1996 |
|
RU2107438C1 |
| Привод перемещения клети стана холодной прокатки труб | 1985 |
|
SU1273200A1 |
| Устройство для испытаний шпинделя прокатного стана | 1983 |
|
SU1161202A1 |
| Устройство для уравновешивания возвратно-перемещаемых масс клети стана холодной прокатки труб | 1977 |
|
SU759152A1 |
| Устройство для испытаний шпинделя прокатного стана | 1985 |
|
SU1258535A2 |
| НИТКОШВЕЙНАЯ МАШИНА И ЕЕ ШВЕЙНЫЙ МЕХАНИЗМ, МЕХАНИЗМ ПЕРЕНОСА НИТИ, МЕХАНИЗМ ПРОКОЛА И НИТЕПРОВОДЯЩИЙ МЕХАНИЗМ | 2004 |
|
RU2283774C2 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ ИЛИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ (ВАРИАНТЫ) | 1995 |
|
RU2115851C1 |
1
Изобретение относится к машиностроению и может быть использовано в цикловых машинах-автоматах с быстроходными реверсируемыми .массами, в частности в плоскопечатных машинах для уравновешивания сил инерции талера.
Известен механизм возвратно-поступательного движения с уравновешиванием сил инерции, содержащий корпус, установленный в нем ползун, закрепленные на корпусе два нагружателя, попарно соединенные друг с другом рычаги, один из которых взаимодействуют с нагружателями, а на других установлены ролики, два кулачка с одинаковыми профилями, зеркально расположенные относительно оси симметрии ползуна и взаимодействующие с ролика.ми 1.
Нагружатели выполнены в виде пневмоцилиндров и поршней, соединенных с рычагами. Поршни в.ходят в пневмоцилиндры только в фазах, близких к крайним положениям ползуна (в периоды реверса).
Основным недостатком данного .механизма является то, что в нем силы инерции .могут быть уравновешены только при движении ползуна по си.мметрично.му комбинированному закону, при котором силы инерции возникают только в крайних положениях. -Целью изобретения является уравновешивание сил инерции в течение всего цикла движения ползуна.
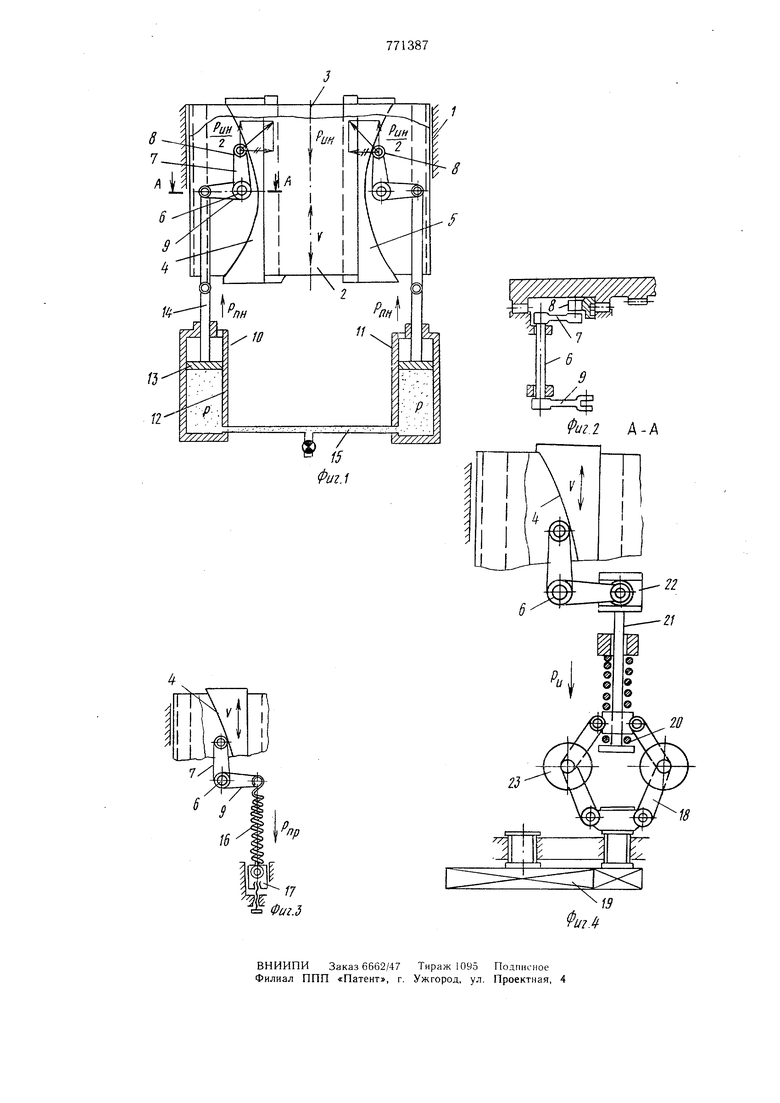
5 Поставленная цель достигается тем, что кулачки жестко закреплены на ползуне, рычаги шарнирно установлены на корпусе, а взаи.модействуюшие с нагружателями концы рычагов шарнирно соединены с ними. На фиг. 1 показана кинематическая схема .механизма; на фиг. 2 - разрез .А-А на фиг. I; на фиг. 3, 4 - варианты выполнения нагружателей.
Механизм содержит корпус 1, установленный в нем ползун 2, закрепленные на ползуне зеркально расположенные относительно его оси 3 симметрии кулачки 4, 5, шарнирно установленные на корпусе на осях 6 рычаги 7, на которых установлены взаимодействующие с кулачками ролики 8 и рычаги 9, шарнирно соединенные с нагружателя20 ми 10 и П. Нагружатели 10 и 11 закреплены на корпусе 1 и могут быть выполнены пнев.матическими (см. фиг. 1,2), пружинными (см. фиг. 3) или инерционными (см. фиг. 4). Пневматические нагружатели состоят из пневмоцилиндров 12 с поршнями 13 и штоками 14, соединенных между собой трубопроводом 15 для выравнивания давления воздуха в них. Пружинные нагружатели выполнены в виде пружин 16, соединенных с регулируемыми стойками 17. Инерционные нагружатели состоят из центробежного регулятора 18, зубчатого привода 19, кинематически связанного с приводом механизма, упорного подшипника 20, штока 21 и кулисы 22. Механизм работает следуюшим образом. Ползун 2 с жестко закрепленными на нем кулачками 4, 5 совершает возвратно-поступательное движение от соответствующего привода, например, от кривошипно-ползунного механизма со ступенчатым скатом. Силы инерции массы ползуна по перемещению вначале от максимума уменьшаются до нуля, а затем меняют направление и опять увеличиваются. Закон движения реверсируемой массы пол зуна может быть и комбинированным. Сущность уравновешивания сводится к приложению к реверсируемой массе ползуна силы, обратной по закону и равной по величине силе инерции. В описываемом механизме уравновешивающей силой является сумма двух продольных составляющих нормальной силы, передаваемой нагружателями через ролики 8 на кулачки 4, 5 ползуна 2. Поперечные составляющие этой силы, противоположно направленные и действуюшие по одной линии, на реверсируемую массу влияния не оказывают. Пневматические нагружатели (см. фиг. 1, 2) создают моменты на рычагах 7 при помощи сжатого воздуха, подаваемого через поршни 13, штоки 14 и оси 6. При изменении скорости работы механизма сила нагружения регулируется изменением начального давления воздуха в цилиндрах. Пружинные нагружатели (см. фиг. 3) создают необходимые моменты с помощью пружин 16. Для нагружения могут быть применены любые пружины: растяжения, сжа тия или кручения. В частности, ось 6, защемленная снизу, может служить нагружателем-торсионом. Следует только обеспечить необходимое направление действия моментов. Регулировка силы нагружения с изменением скорости работы механизма осуществляется перемещением стойки 17. Инерционные нагружатели (см. фиг. 4) создают необходимые моменты на рычагах 7 с помощью центробежной силы грузов 23, вращаемых с равномерной скоростью через зубчатый привод 19. Под действием центро,бежной силы грузов 23 поступательно перемещается (через упорный подшипник 20) шток 21, который через кулису 22 поворачивает рычаг 9, закрепленный на оси 6. При изменении скорости механизма соответственно меняется скорость вращения регулятора и возникающая центробежная сила, что обеспечивает автоматическое регулирование силы нагружения. Изобретение обеспечивает полное уравновещивание поступательно-реверсируемой массы, движущейся по любому симметричному закону движения. Использование подобного механизма в цикловых машинахавтоматах, характерных наличием значительных поступательно-реверсируемых масс, позволит в 6-8 раз сократить действующие динамические силы и соответственно увеличить производительность. Формула изобретения Механизм возвратно-поступательного движения с уравновешиванием сил инерции, содержащий корпус, установленный в нем ползун, закрепленные на корпусе два нагружателя, попарно соединенные друг с другом рычаги, одни из которых взаимодействуют с нагружателями, а на других установлены ролики, два кулачка с од.инаковыми профилями, зеркально расположенные относительно оси симметрии ползуна и взаимодействующие с роликами, отличающийся тем, что, с целью уравновещйвания сил инерции в течение всего цикла движения ползуна, кулачки жестко закреплены на ползуне, рычаги щарнирно установлены на корпусе, а взаимодействующие с нагружателями концы рычагов щарнирно соединены с ними. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 120842, кл. В 41 F 3/78, 1958 (прототип)
