1
Изобретение относится к полиграфической промышленности.
Известен механизм привода плоскопечатного устройства, содержащий однооборотный кривошипный вал, связанный с ведущим зубчатым сектором, талером и реверсивным печатным цилиндром.
Л1еханизм привода -плоскопечатной машины работает следующим образом.
В период рабочего хода шестерня цилиндра получает вращение от рейки талера, имеющего Кривошипно-шатунный приеод, а в.период холостого хода--от круглого сектора, закрепленного на промежуточном валу, связанного с Главным валом посредст1вом шестерен.
Однако этот механизм -сообщает талеру и цилиндру .движение по сложному закону, изза чего практически исключается возможн-ость полного уравно-вешивания инерционных сил в -приводе, ухудшается динамика плоскопечатной машины и ограничивается наибольшая скорость ее работы.
Цель изобретения - повысить скорость работы машины .путем улучшения ее динамики.
Это достигается тем, что механизм -привода печатного а-ппарата снабжен торсионным валом, вторым криеоши пом, установленным на ведущем валу диаметрально -противоположно первому кривошипу, неподвижным корректирующим пазовым кулачком, находящимися в
зацеплении между собой двумя зубчатыми секторами с -пазами, один из которых жестко -ов-язан с в-едущим сектором, при этом последний имеет радиальный паз с регулируемым
ползунком, кинематически связанным с торсионным валом, и оба кривошипа -подпружинены и установлены с возможностью взаимодействия с корректирующим кулачком и с пазами зубчатых секторов.
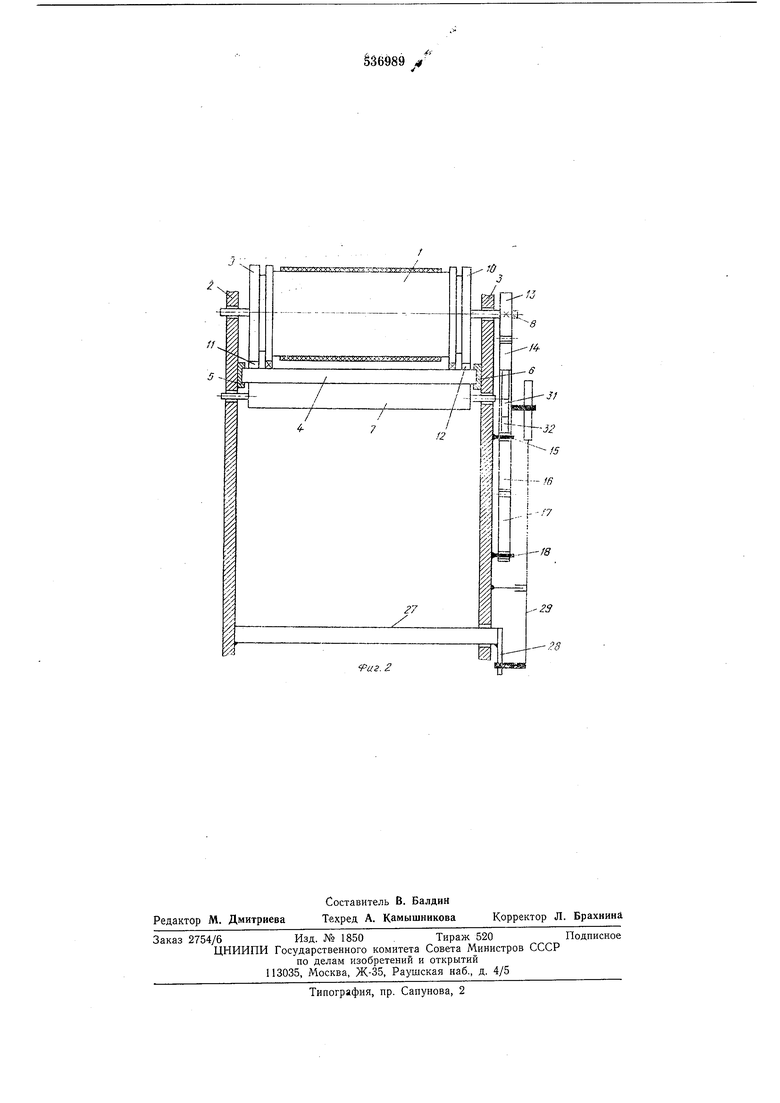
На -фиг. 1 изображена схема предлагаемого механизма привода плоскопечатного аппарата с торсионной системой уравновешивания сил инерции; на фиг. 2 показан плоскопечатный аппарат, поперечный разрез.
Механизм привода содержит печатный ц-илиндр 1, закрепленный на опорах в стенках 2 и 3 станины, и талер 4, перемешающийся по неподвижным направляющим 5 и -6 и опирающийся В зоне печатного контакта на опорный
-вал 7, установленный в неподвижных опорах на станине с возможностью вращения.
На оси 8 печатного цилиндра жестко закреплены шестерни 9 и 10, находящиеся в постоянном зацеплении с боковыми верхними
рейками 11 и 12 талера, и шестерня 13, зацепляющаяся с ведущим зубчатым сектором 14, который установлен на оси 15 и жестко связан с дополнительным сектором 16. Последний находится в постоянном зацеплении с таКИМ же точно дополнительным сектором 17, установленным на оси 18, причем оба эти сектора имеют центральный угол, несколько больший 90°, и снабжены открытыми радиальными пазами 19 и 20, © которые -поочередно входят подпружиненные оальцы 21 и 22 двух диаметрально противоположных кривошипов 23 и 24, закрепленных на деухоборотном валу 25 машипы и имеюш,их наибольший радиус г, равный радиусу секторов 16 и 17. Для получения гармонического закона движения секторов и, следовательно, талера и печатного цилиндра в механизме привода установлен неподвижный корректирующий пазовый кулачок 26, заста1вляюш;ий подпружиненные пальцы Кривошипов двигаться по «риеолинейной траектории. Для уравновешивания инерционных сил талера и цилиндра в механизме их привода установлен бесшумно и безударно работающий торсионный амортизатор, выполненный в ейде упругого вала 27. Одним концом торсионный вал заделан в станину, а другим - посредст1вом рычагов 28 и 29 связан с пальцем 30 ползуна 31, установленного в радиальном пазу 32 ведущего сектора 14. Механизм привода работает следующим образом. В момент входа пальца 21 в паз 19 и одновременно в паз кулачка 26 (на фиг. 1 это положение пальца показано лунктиром) палец 22 выходит из паза 20 и паза кулачка 26, при этом секторы 16 и 17 неподви 1 ны, а талер 4 находится в крайнем левом положении. При последующем движении пальца 21 в пазу 19 и пазу кулачка 26 зубчатый сектор 16 и связанный С ним сектор 17 поворачиваются по стрелкам А и В на 90° и занимают положение, показанное на фиг. 1 штриховыми линиями. В этом положении палец 21 выходит из паза 19 и входит в совпадающий iC ним по направлению паз 20, после чего секторы снова поворачиваются на 90°, но уже в обратные стороны, и талер 4 перемещается слева направо. В момент выхода пальца 21 из паза 20, когда талер достигает крайнего правого положения, палец 22 входит в паз 19 и цикл повторяется. Так как каждый из пальцев 21 и 22, взаимодействуя с пазами 19 и 20, проходит по профилю кулачка 26, то при прямом и обратном ходе талера его перемещ-ение и ускорение, а следовательно, и пропорциональные им силы инерции изменяются по синусоидальному закону. При этом силы инерции талера и цилиндра являются линейной функцией перемещения любого связанного с ним звена механизма привода, и поэтому эти силы инерции можно полностью уравновесить с помощью пружин кручения или торсионного вала 27. Благодаря тому что последний связан рычажной системой с ведущим сектором 14, угол закручивания вала 27 всегда пропорционален величинам перемещений, ускорений и сил инерции талера и цилиндра. При этом путем надлежащего выбора (с помощью расчета) радиуса , определяющего положение ползуна 31 в пазу 32, при заданной жесткости торсионного вала и заданной скорости работы машины всегда можно добиться того, чтобы приведенные к пальцу 30 реакция торсионного вала и силы инерции талера и цилиндра полностью уравновешивались в течение всего кинематического цикла. Так как величина сил инерции зависит от скорости работы машины, то при изменении последней величина угла закручивания и, следовательно, реакция торсионного вала должны регулироваться (также в полном соот1ветствии с законом изменения сил инерции) путем принудительного перемещения ползуна 31 с пальцем 30 в пазу 32 сектора 14 (т. е. путем изменения радиуса R), например, посредCTiBOM винта 33. Это перемещение ползуна 31, являющееся функцией скорости, может быть осуществлено с помощью следящей приводной системы известного типа. Помимо полного уравновешивания сил инерции талера и цилиндра в течение всего кинематического цикла работы плоскопечатного аппарата, достоинство предлагаемого привода заключается в том, что все его звенья соверща.ют только вращательное движение и вследствие этого конструктивно легко закрепляются в опорах, а установленный в приводе торсионный амортизатор работает без ударов и щума. Все звенья механизма могут -быть также заключены в масляную ванну, которая в виде отдельной коробки привода может закрепляться на наружной стороне «орпуса машины. Bice это позволит улучщ-ить динамику привода плоскопечатной машины и по1высить скорость ее работы. Формула изобретения Механизм привода печатного аппарата плоскопечатной машины, содержащий ведущий вал с установленным на нем кривошипом и ведущий зубчатый сектор, связанный с кривошипом и с печатным цилиндром печатного аппарата, отл ич-ающ-и и ся тем, что, с целью повышения скорости работы машины путем улучшения ее динамики, он снабжен торсионным валом, вторым кривошипом, установленным на ведущем валу диаметрально протиоположно первому кривошипу, неподвижным орректирующим назовым кулачком, находящимися в зацеплении между собой двумя зубатыми секторами с пазами, один из которых естко связан с ведущим сектором, при этом оследний имеет радиальный паз с регулирумым ползунком, кинематически связанным с орсионным валом, а оба кривошипа подпруинены и установлены с возможностью взаиодействия с корректирующим кулачком н с азами зубчатых секторов. Источник информации, принятый во внимаие при экспертизе: 1. Тюрин А. А. Печатные машины, М., издо «Книга, 1966, с. 149-150 (прототип).
э,ю
Фиг. 1
y.
Эс
K/4 в
3
i2
.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод талера плоскопечатной машины | 1978 |
|
SU719894A1 |
| Привод талера плоскопечатной машины | 1979 |
|
SU821211A1 |
| Привод талера плоскопечатной машины | 1987 |
|
SU1475819A1 |
| МЕХАНИЗМ ПРИВОДА ТАЛЕРА ПЛОСКОПЕЧАТНОЙ МАШИНЫ | 1972 |
|
SU350674A1 |
| Учебный стенд по проектированию плоскопечатных машин | 1980 |
|
SU999090A1 |
| Устройство для уравновешивания инерционных сил в приводе талера плоскопечатной машины | 1975 |
|
SU745711A1 |
| ПРИВОД ПЕЧАТНОГО АППАРАТА ПЛОСКОПЕЧАТНОЙМАШИНЫ | 1969 |
|
SU238559A1 |
| Плоскопечатная машина | 1974 |
|
SU602388A1 |
| МЕХАНИЗМ ПРИВОДА ПЕЧАТНОГО ЦИЛИНДРА ПЛОСКОПЕЧАТНОЙ МАШИНЫ | 1967 |
|
SU195470A1 |
| Привод талера плоскопечатных двухоборотных машин | 1959 |
|
SU126121A1 |