Изобретение относится к управлению электрическими двигателями, в частности к регулированию электродвигателей с шаговым вращением якоря, и может быть использовано при программном управлении координатными приводами подач металлорежущих станков.
Цель изобретения - повышение надежности путем снижения нагрева двигателя .
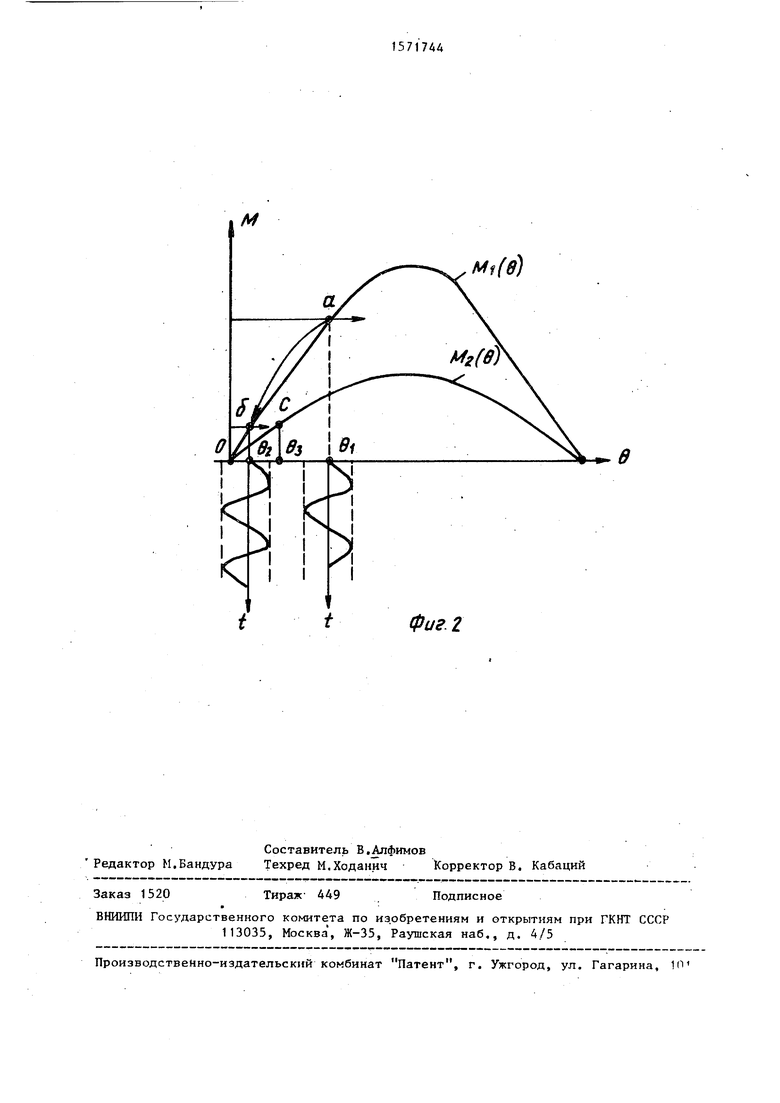
На фиг.1 представлен пример реализации способа аппаратно-программными средствами с использованием числового программного управления; на фиг.2 - моментные характеристики шагового привода.
Устройство 1 числового программного управления (фиг.1) подключено к шаговому приводу 2, который включает в себя распределитель 3 импульсов, элемент 4 сравнения, усилитель 5, фазные обмотки 6 (показана одна),
датчик 7 тока, преобразователь 8 код - напряжение.
Цифровой вход привода 2 соединен с выходами устройства 1 или с интерфейсом микроЭВМ, входящей в состав устройства 1 о
Способ реализуется следующим образом.
При разг-оне ротор двигателя находится в окрестности точки 9Д (фиг.2), соответствующей точке а на момент- ной характеристике М(9) в n-м такте при уставке тока на участке разгона (рассматривается режим на средних и высоких частотах). При разгоне рассогласование ротора относительно точки о может достигать несколько шагов. Если, согласно известным способам, при переходе на движение с постоянной скоростью сразу изменить уставку тока до значения, соответствующего этому режиму, то двигатель
in
ч
S
Ј
может выйти из синхронизма, так как его угловое положение на характеристике М.(б) превышает границу.устойчивости положения. Кроме того, наличие эазоров и упругостей в механизмах в переходных режимах вызывает дополнительные динамические нагрузки, что также может явиться причиной выпадени из синхронизма.
Согласно данному спосрбу уставку тока задерживают на время, равное t n - утроенному периоду собственной частоты шагового привода. В связи с уменьшением нагрузки на двигатель |при задержанной уставке ротор перемещается в окрестность точки 9г (точка б), соответствующей меньшему угловому рассогласованию и находящейся в зоне устойчивого положения момейтно характеристики М2 (9). При этом колебания ротора, связанные со скачкообразным изменением нагрузки, затухнут за время tn. После этого уставку тока уменьшают. При этом моментная характеристика имеет вид М2(б) фиг.2), ротор шагового привода перемещается в окрестность точки 03 (точка с). Для обеспечения устойчивой работы привода в известных решениях уставку тока в режиме движения с постоянной скоростью необходимо повышать относительно достаточной уставки для дви
5
Q
д
5
0
жения в этом режиме. В данном способе эта уставка может быть снижена, в
результате чего повышается КПД двигателя. Время переходных процессов как правило, существенно меньше времени движения с постоянной скоростью, следовательно, и тепловые потери в предлагаемом способе будут меньше.
Одновременное повышение точности и производительности станков, где используются шаговые приводы подач, ограничено допустимыми тепловыми режимами шагового двигателя. Использование способа приводит либо к повышению производительности станка при ггой же точности, либо к повышению точности при той же производительности. Формула изобретения.
Способ управления шаговым приводом, включающий регулирование тока фаз двигателя, задание уставки тока фаз двигателя при разгоне пропорционально заданному ускорению и уменьшение уставки тока при движении с постоянной скоростью, отличающийся тем, что, с целью повышения надежности путем снижения нагрева двигателя, после окончания разгона и выхода на постоянную скорость задерживают уменьшение уставки на время, равное трем периодам собственной частоты шагового привода.

Изобретение относится к электротехнике, в частности к регулированию электродвигателей с шаговым вращением якоря, и может быть использовано при программном управлении координатными приводами подач металлорежущих станков. Цель изобретения - повышение надежности путем снижения нагрева шагового двигателя. При разгоне увеличивают уставку тока фазы пропорционально заданному ускорению, после окончания разгона удерживают ее неизменной в течение трех периодов собственной частоты шагового привода, затем снижают ее. 2 ил.
Фиг1
Редактор И.Бандура
Составитель В.Алфимов
Техред М.Ходанич Корректор В. Кабаций
Заказ 1520
Тирах 449
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, Ю
Mi(0)
e
фиг. 2
Подписное
