(54) КОПИРОВАЛЬНЫЙ ПРИБОР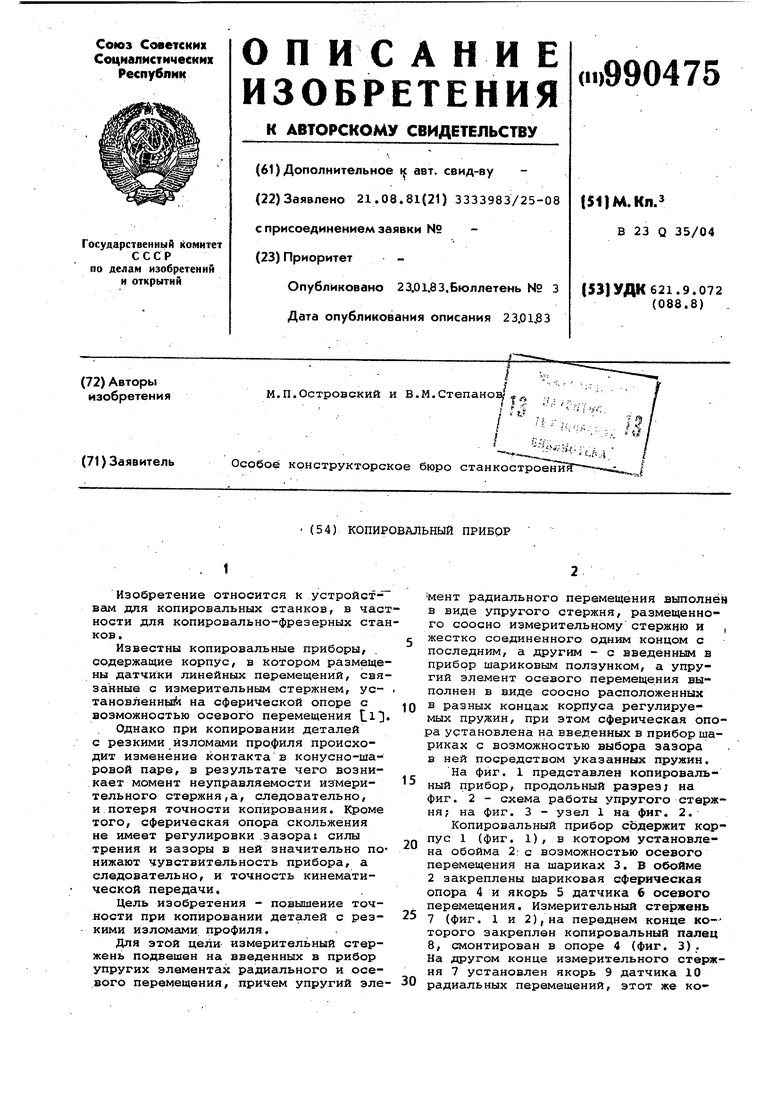
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для копирования | 1989 |
|
SU1708589A1 |
| Копировальный прибор | 1981 |
|
SU996173A1 |
| КОПИРОВАЛЬНЫЙ ПРИБОР | 1972 |
|
SU324129A1 |
| Копировальный прибор | 1981 |
|
SU1000235A1 |
| КОПИРОВАЛЬНЫЙ ЩУП С ТРЕХКООРДИНАТНОЙ СЛЕДЯЩЕЙ СИСТЕМОЙ УПРАВЛЕНИЯ ИЗМЕРЕНИЕМ | 1991 |
|
RU2025649C1 |
| АВТОМАТИЧЕСКОЕ ТЯГОВО-СЦЕПНОЕ УСТРОЙСТВО | 1999 |
|
RU2154581C1 |
| Контактное приспособление для электромеханических следящих устройств к металлорежущим станкам | 1948 |
|
SU87524A1 |
| КОПИРОВАЛЬНЫЙ СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ ОБЪЕМНЫХ ЭЛЕМЕНТОВ | 1972 |
|
SU354985A1 |
| Двухкоординатное гидравлическое устройство к копировально-фрезерным станкам | 1960 |
|
SU139539A1 |
| Копировальный прибор | 1978 |
|
SU879096A1 |
Изобретение относится к устройствам для копировальных станков, в частности для копировально-фрезерных станков.
Известны копировальные приборы, . содержащие корпус, в котором размещены датчики линейных перемещений, связанные с измерительнЕЛм стержнем, ус- . тановленный на сферической опоре с возможностью осевого перемещения
Однако при копировании деталей с резкими изломами профиля происходит изменение контакта в конусно-шаровой паре, в результате чего возникает момент неуправляемости из-мерительного стержня,а, следовательно, и потеря точности копирования. Кроме того, сферическая опора скольжения не имеет регулировки .зазорач силы трения и зазоры в ней значительно понижают чувствительность прибора, а следовательно, и точность кинематической передачи.
Цель изобретения - повышение точности при копировании деталей с резкими изломами профиля.
Для этой цели измерительный стержень подвешен на введенных в прибор упругих элементах радиального и осевого перемещения, причем упругий элемент радиального перемещения выполнен в виде упругого стержня, размещенного соосно измерительномустержню и , жестко соединенного одним концом с последним, а другим - с введенным в прибор шариковым ползунком, а упругий элемент осевого перемещения выполнен в виде соосно расположенных в разных концах корпуса регулируе10мых пружин, при этом сферическая опора установлена на введенных в прибор шариках с возможностью выбора зазора в ней посредством указанных пружин.
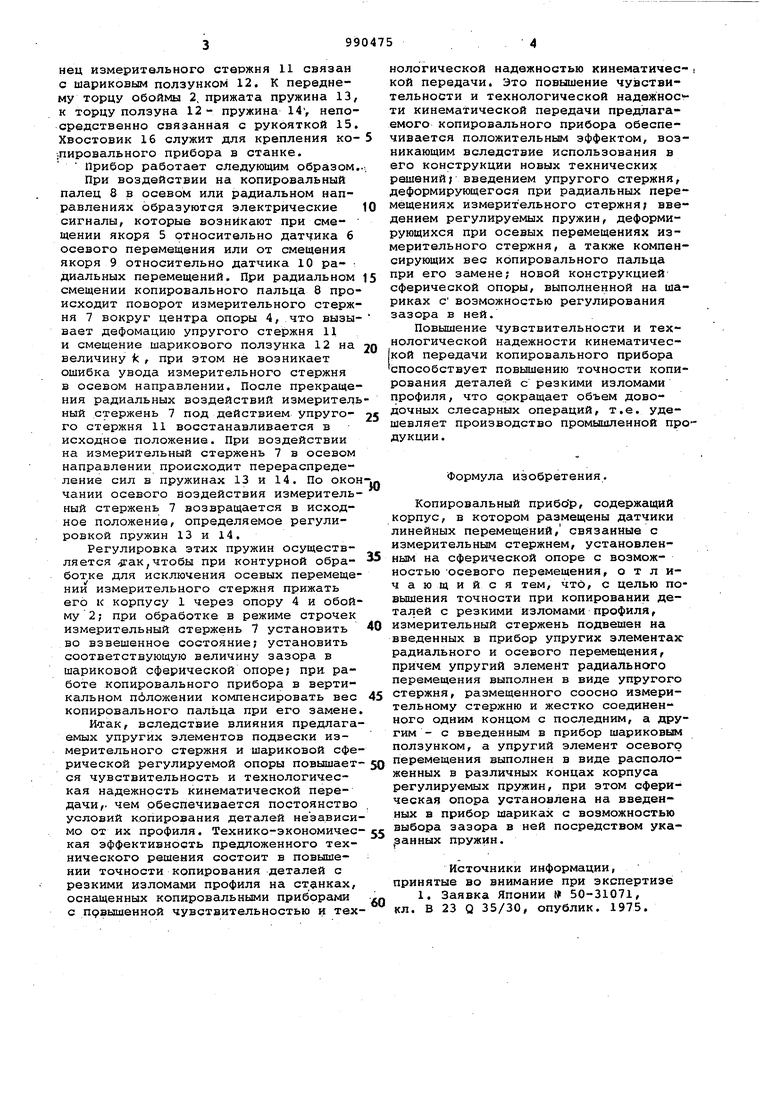
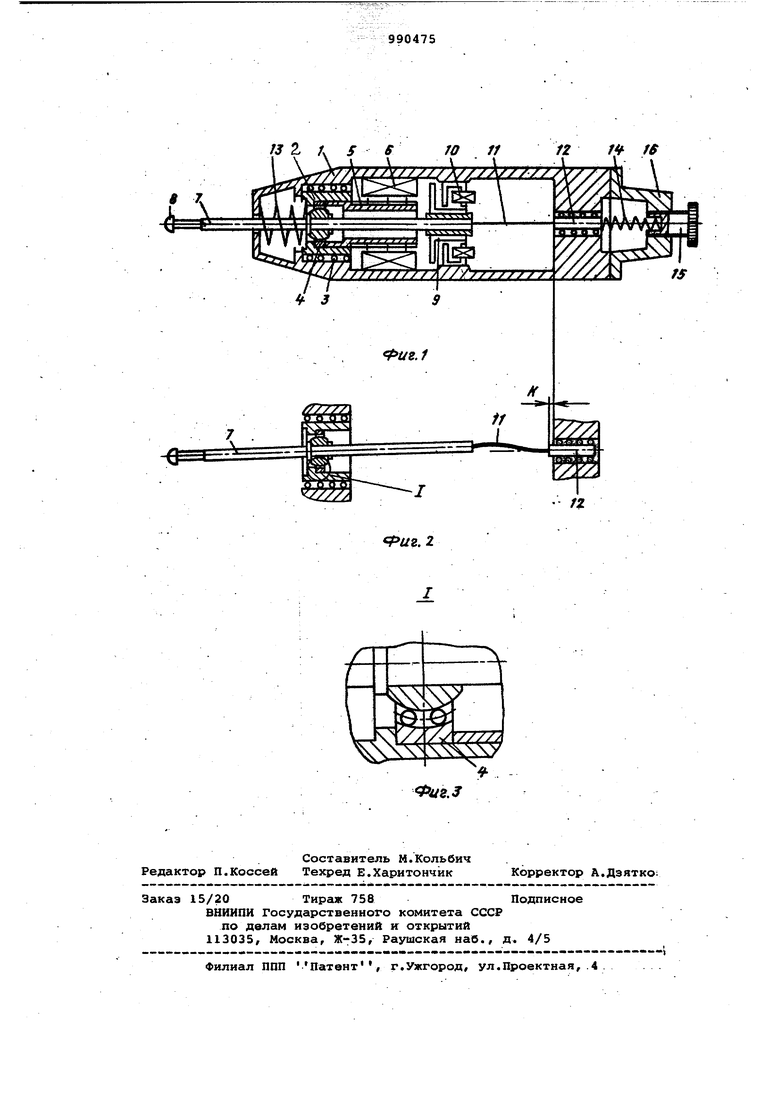
На фиг. 1 представлен копироваль15ный прибор, продольный разрез; на фиг. 2 - схема работы упругого стержня; на фиг. 3 - узел 1 на фиг. 2.
Копировальный прибор содержит корпус 1 (фиг. 1), в котором установле20на обойма 2: с возможностью осевого перемещения на шариках 3. В обойме 2 закреплены шариковая сферическая опора 4 и якорь 5 датчика 6 осевого перемещения. Измерительный cTejpxeHb
25 7 (фиг. 1 и 2),на переднем конце ко-торого закреплен копировальный палец 8, смонтирован в опоре 4 (фиг. 3j. На другом конце измерительного стержня 7 установлен якорь 9 датчика 10
30 радиальных перемещений, этот же конец измерительного стержня 11 связан с шариковым ползунком 12. К переднему торцу обоймы 2, прижата пружина 13, к торцу ползуна 12 - пружина 14, непосредственно связанная с рукояткой 15. Хвостовик 16 служит для крепления ко;пировального прибора в станке.
Прибор работает следующим образом.
При воздействии на копировальный палец 8 в осевом или радиальном направлениях образуются электрические сигналы, которые возникают при смещении якоря 5 относительно датчика 6 осевого перемещения или от смещения якоря 9 относительно датчика 10 ра- диальных перемещений. При радиальном смещении копировального пальца 8 происходит поворот измерительного стержня 7 вокруг центра опоры 4, что вызывает дефомацию упругого стержня 11 и смещение шарикового ползунка 12 на величину k , при этом не возникает ошибка увода измерительного стержня в осевом направлении. После прекращения радиальных воздействий измерительный стержень 7 под действием упругого стержня 11 восстанавливается в исходное положение. При воздействии на измерительный стержень 7 в осевом направлении происходит перераспределение сил в пружинах 13 и 14. По окон чании осевого йоздействия измерительный стержень 7 возвращается в исходное положение, определяемое регулировкой пружин 13 и 14.
Регулировка этих пружин осуществляется ак,чтобы при контурной обработке для исключения осевых перемещении измерительного стержня прижать его к корпусу 1 через опору 4 и обойму 2 ; при обработке в режиме строчек измерительный стержень 7 установить во взвешенное состояние; установить соответствующую величину зазора в шариковой сферической опоре, при. работе копировального прибора в вертикальном положении компенсировать вес копировального пальца при его замене
Итак, вследствие влияния предлагаемых упругих элементов подвески измерительного стержня и шариковой сферической регулируемой опоры повышается чувствительность и технологическая надежность кинематической передачи,, чем обеспечивается постоянство условий копирования деталей независимо от их профиля. Технико-экономическая эффективность предложенного технического решения состоит в повышении точности копирования деталей с резкими изломами профиля на станках, оснащенных копировальными приборами с првышенной чувствительностью и технологической надежностью кинематической передачи. Это повышение чувствительности и технологической надежности кинематической передачи предлагаемого копировального прибора обеспечивается положительным эффектом, возникающим вследствие использования в его конструкции новых технических решений; введением упругого стержня, деформирующегося при радиальных перемещениях измерительного стержня; введением регулируемых пружин, деформирующихся при осевых перемещениях измерительного стержня, а также компенсирующих вес копировального пальца при его замене; новой конструкцией сферической опоры, выполненной на шариках с возможностью регулирования зазора в ней.
Повышение чувствительности и технологической надежности кинематической передачи копировального прибора способствует повышению точности копирования деталей с резкими изломами профиля, что сокращает объем доводочных слесарных операций, т.е. удешевляет производство промышленной продукции.
Формула изобретения.
Копировальный прибор, содержащий корпус, в котором размещены датчики линейных перемещений, связанные с измерительным стержнем, установленным на сферической опоре с возможностью Осевого перемещения, о т л ичающийся тем, чтО, с целью повышения точности при копировании деталей с резкими изломами профиля, измерительный стержень подвешен на введенных в прибор упругих элементахрадиального и осевого перемещения, причем упругий элемент радиального перемещения выполнен в виде упругого стержня, размещенного соосно измерительному стержню и жестко соединенного одним концом с последним, а другим - с введенным в прибор шариковым ползунком, а упругий элемент осевого перемещения выполнен в виде расположенных в различных концах корпуса регулируемых пружин, при этом сферическая опора установлена на введенных в прибор шариках с возможностью выбора зазора в ней посредством укаранных пружин.
Источники информации, принятые во внимание при экспертизе
