7 8 9
00
ел со о
Изобретение относится к станкостроению и может быть использовано в электрокопировальных токарных станках, предназначенных для обработки простых и фасонных поверхностей со скачкообразным изменением профиля.
Цель изобретения - расширение технологических возможностей прибора путем обеспечения возможности обработки деталей со скачкообразным изменением профиля.
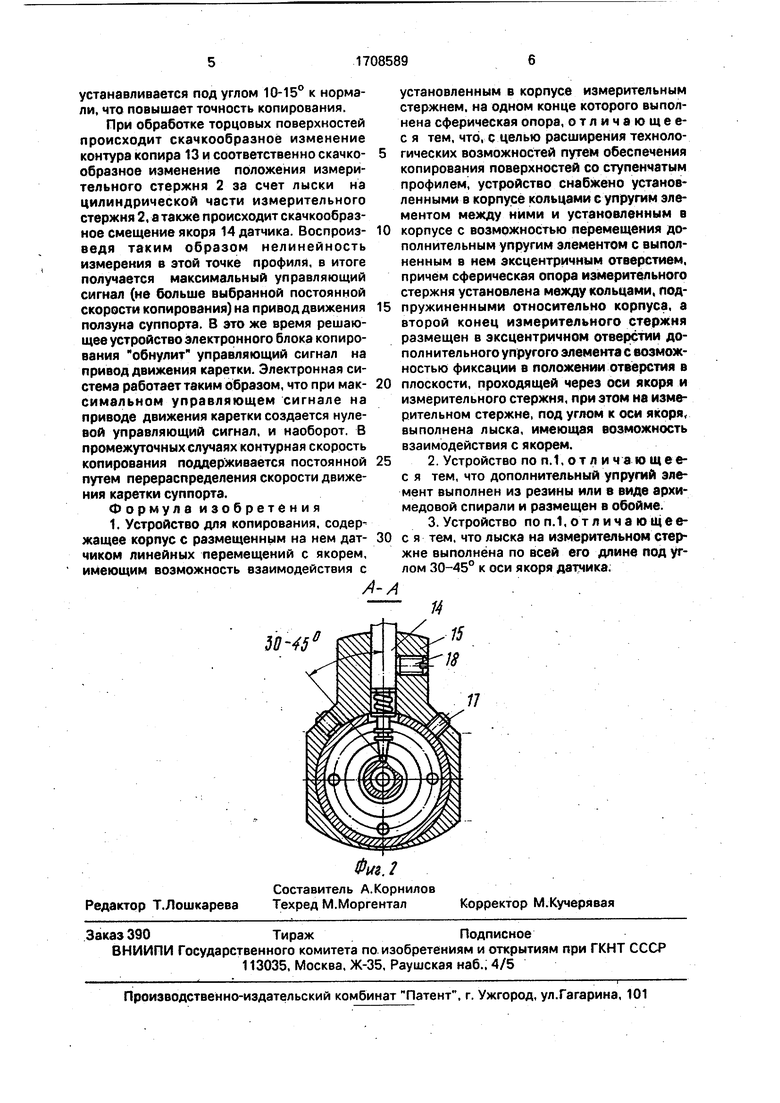
На фиг.1 показан копировальнь1й прибор, продольный разрез; на фиг,2 - разрез А-А на фиг, 1.
Устройство содержит, корпус 1, в котором смонтирован измерительный стержень 2, представляющий собой цилиндр с лыской, образующий регулируемый угол 30-45° с осью якоря датчика, заканчивающийся сферической головкой, в которую вворачивается сменный щуп 3, фиксируемый гайкой 4.
Цилиндрическая часть измерительного стержня проходит сквозь промежуточный упругий элемент 5 с эксцентрично расположенным центральным отверстием, выполненный, например, из резины или пружины в виде Архимедовой спирали и заключенный в обойму 6, воспринимающий радиальную нагрузку от шарнира, состоящего из сферической головки, закрепленной между двумя шайбами 7 в накидной гайке 8 зажимной гайкой 9. Для устранения перекоса между шайбами 7 вставлена эластичная прокладка 10 (например, из резины), а для выбора зазора между стенкой накидной гайки 8 и шайбой 7 установлена тарельчатая пружина 11.
Усилие трения в шарнире регулируется гайкой 9. Измерительный стержень 2 в сборе с шарниром и обоймой с упругим элементом вставляется в корпус 1 и фиксируется накидной гайкой 8 и контргайкой 12- Щуп 3, контактируя с копиром 13, передает свое движение через шарнир на якорь 14 датчика, смонтированного в наружном корпусе 15.
Регулировка величины усилия на щупе 3 осуществляется перемещением обоймы 6 с упругим элементом 5 вдоль измерительного стержня 2, и после настройки обойма фиксируется винтом 16.
Регулировка чувствительности копировального прибора осуществляется перемещением наружного корпуса 15 вдоль измерительного стержня 2 по пазу в корпусе 1, и после настройки наружный корпус фиксируется винтами 17. Регулировка положения датчика относительно измерительного стержня 2 осуществляется перемещением датчика в наружном корпусе 15, и после настройки положение датчика фиксируется винтами 18.
Для воспроизведения нелинейности измерения при копировании скачкообразно изменя1Ьщегося профиля служит лыска на цилиндрической части измерительного стержня 2. Степень нелинейности можно регулировать установкой лыски под различ:0 ными углами поворотом относительно собственой оси измерительного стержня 2 в упругом элементе 5 и вносить запаздывание на ввод нелинейности в-измерения.
Первоначальное положение измерительного стержня 2 устанавливается с помощью эксцентрично расположенного центрального отверстия (см.фиг.1) упругого элемента 5. При этом датчик выдает максимальный управляющий сигнал через элект0 ронный блок копирования Движение вниз на привод ползуна суппорта. В дальнейшем упругий элемент 5 стремится сохранить это первоначальное расстояние, создавая постоянное прижатие щупа к копиру 13.
5 Устройство устанавливается на ползун суппорта и работает следующим образом.
В первоначальном положении за счет эксцентриситета упругого элемента 5 измерительный, стержень 2 опущен щупом 3
0 вниз, а цилиндром - вверх и поджимает якорь 14 датчика на такое рассогласование, которое формирует через злектронный блок копирования управляющий сигнал движения вниз на привод ползуна суппорта. При
5 включении режима копирования ползун автоматически опускает копировальный прибор на копир 13. Под воздействием копира 13 на щуп 3 измерительный стержень 2 перемещается цилиндрической частью вниз,
0 тем самым смещая якорь 14 датчика. При достижении якорем положения электрического нуля измерительный стержень 2 занимает горизонтальное положение, включается решающее устройство электронного блока копирования и щуп 3 начинает движение по копиру с выбранной заранее постоянной скоростью по всему контуру. Щуп 3 поджат к копиру 13 за счет сил эксцентричного упругого элемента 5,
0 стремящегося вернуть измерительный стержень 2 в первоначально заданное положение. Все движения щупа 3 через сферический шарнир передаются на датчик, электросигналы с которого формируются в
5 управляющий сигнал на привод движения ползуна суппорта. При плавном изменении контура копира 13 якорь 14 датчика контактирует с цилиндрической частью измерительного стержня 2. причем при обработке поверхностей с внутренними углами датчик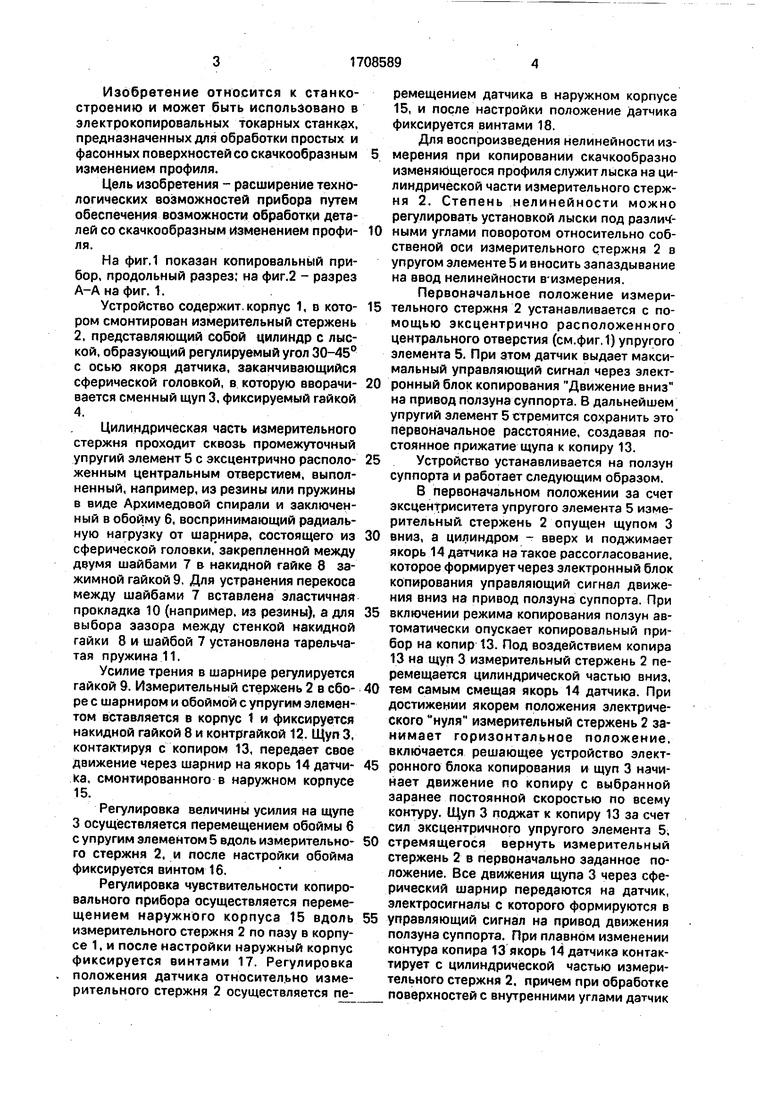
| название | год | авторы | номер документа |
|---|---|---|---|
| Копировальный прибор | 1981 |
|
SU990475A1 |
| Система управления копированием | 1980 |
|
SU965726A1 |
| КОПИРОВАЛЬНОЕ УСТРОЙСТВО ДЛЯ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 1967 |
|
SU222848A1 |
| Полуавтоматический электрокопировальный фрезерный станок для обработки фасонных контуров больших размеров, в частности самолетных шаблонов | 1948 |
|
SU86730A1 |
| Многошпиндельный гравировальный копировально-фрезерный станок | 1953 |
|
SU116956A2 |
| Копировальный прибор | 1981 |
|
SU996173A1 |
| Устройство для управления деформациями в системе СПИД | 1982 |
|
SU1071371A1 |
| Копировальное устройство | 1977 |
|
SU657966A1 |
| УСТРОЙСТВО ДЛЯ МНОГОПРОХОДНОЙ ОБРАБОТКИ СТУПЕНЧАТЫХ ДЕТАЛЕЙ | 1969 |
|
SU253527A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ИЗМЕНЕНИЯ РАЗМЕРОВ ДИСКОВ-ИНСТРУМЕНТОВ | 1949 |
|
SU85499A1 |
Изобретение относится к станкостроению и может быть использовано в электрокопировальных токарных станках, предназначенных для обработки простых и фасонных поверхнЬстей со скачкообразным изменением профиля. Целью изобретения является расширение технологических возможностей прибора путем обеспечения возможности обработки деталей со2/скачкообразным изменением профиля. В начальном положении за счет зксцентри- ситета упругого элемента 5 стержень 2 спущен щупом 3 вниз, копировальный прибор опускается на копир 13, в результате чего измерительный стержень перемещается цилиндрической частью вниз, смещая ось якоря датчика. При достижении якорем положения электрического "нуля" стержень 2 занимает горизонтальное положение, включается решающее устройство электронного блока копирования и щуп 3 начинает движение по копиру 13. Все перемещения щупа через сферический шарнир передаются на датчик, с которого формируются в управляющий сигнал и подаются на привод. При обработке торцовых поверхностей осуществляется скачкообразное изменение положения стержня,» а следовательно, происходит скачкообразное изменение положения якоря датчика. 2 з.п. ф-лы, 2 ил.ч^ё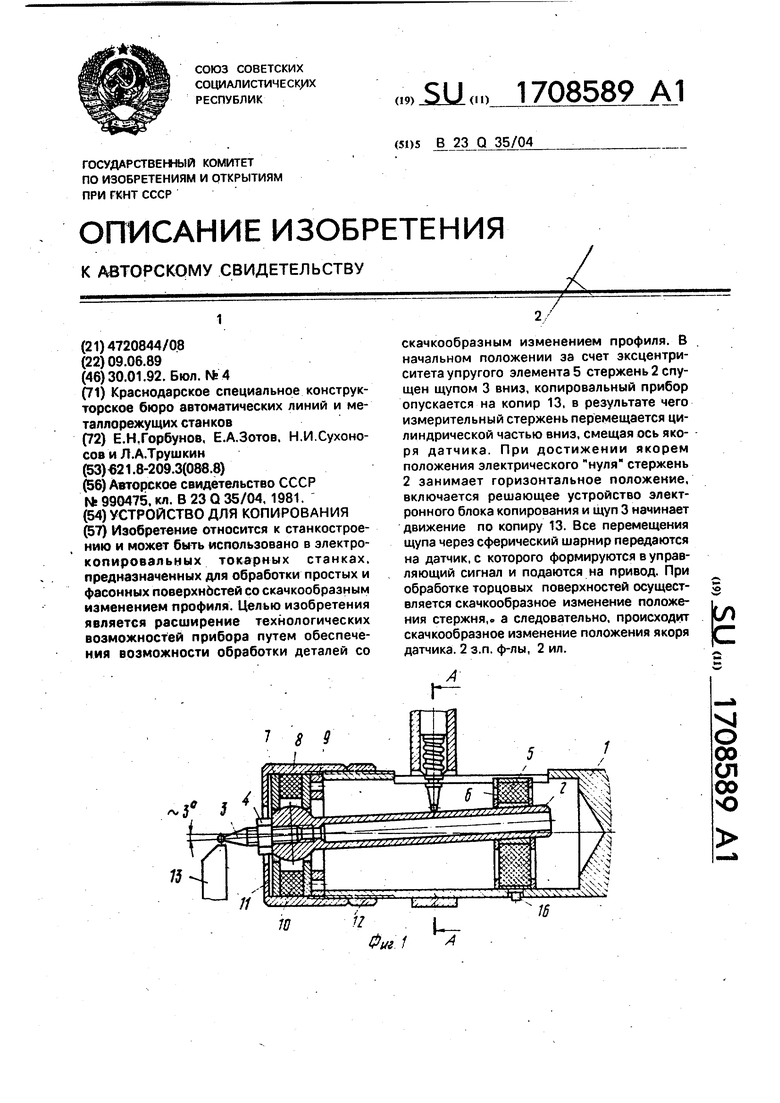
| Копировальный прибор | 1981 |
|
SU990475A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
