Изобретение относится к измерительной технике, к типовым функциональным узлам измерительной оснастки.
Известна измерительная модульная головка [1], состоящая из механизма модульного преобразования, выполненного в виде стержня, рычага с гнездами и двух шаров, размещенных в этих гнездах.
Данная трехкоординатная измерительная модульная головка обладает рядом недостатков: значительной инерционностью (динамические погрешности) и при эксплуатации особую опасность представляют утечки воздуха и перегибы воздуховодов.
Известна трехкоординатная измерительная головка [2], содержащая узел преобразования перемещения измерительного наконечника в перемещении чувствительных элементов датчиков по осям x, y в виде крестовины и шарнира, перемещение измерительного наконечника в перемещении чувствительного элемента датчика выполнена в виде штока.
Данная измерительная трехкоординатная головка обладает рядом недостатков, зазор в шаровом шарнире может привести к вариации показаний вторичного прибора.
Наиболее близким по технической сущности является щуп копировальный с трехкоординатной следящей системой управления измерением [3], содержащий корпус, укрепленный на нем мембраной по наружному диаметру, во внутренней части мембраны закреплена втулка, на которой размещены демпфер и контакты x, y. На кронштейне укреплены датчики x и y, с помощью стоек в щуп вмонтирован блок усилителей. На конец втулки посредством резьбы вворачивается регулируемый стержень, в котором расположен датчик с контактом, перемещение контакта датчика осуществляется с помощью втулки, соединенной регулирующим стержнем резьбой, в которой установлены шаровые втулки, где перемещается вал с закрепленным на нем контактом. На валу укреплен механизм регулировки веса, а на регулирующем стержне - точная настройка "0".
Недостатком данного щупа копировального с трехкоординатной следящей системой управления измерением является то, что пружина механизма регулировки веса вклеена и возникают большие трудности закрепить пружину.
Усложнен узел перемещения контакта по оси Z.
В результате знакопеременных нагрузок мембрана деформируется и дает вариации на вторичном приборе.
Целью изобретения является повышение точности механизма путем обеспечения регулировки жесткости демпфирующего элемента и устранение в механизме лишних связей.
Это достигается тем, что в известный щуп копировальный с трехкоординатной следящей системой управления измерением, содержащий корпус, закрепленный на станине станка с жидкостной демпфирующей камерой и пустотелым стержнем, на наружном конце которого укреплены контакты, которые связаны с датчиками управления по осям X и Y, а на другом конце внутри стержня установлен перемещающийся посредством шаровой втулки в осевом направлении палец, связанный через механизм регулировки веса с контактом датчика. Причем механизм регулировки жесткости выполнен в виде демпфирующего элемента типа струнный подвес с двумя осевыми разрезными опорами и для датчиков x и y, установленных внутри демпфирующей камеры, предусмотрены механизмы осевой настройки в виде винтовых гаек, а в механизме регулировки веса для установки торированной пружины в торцовых гайках предусмотрены уступы и винтовые канавки для фиксации.
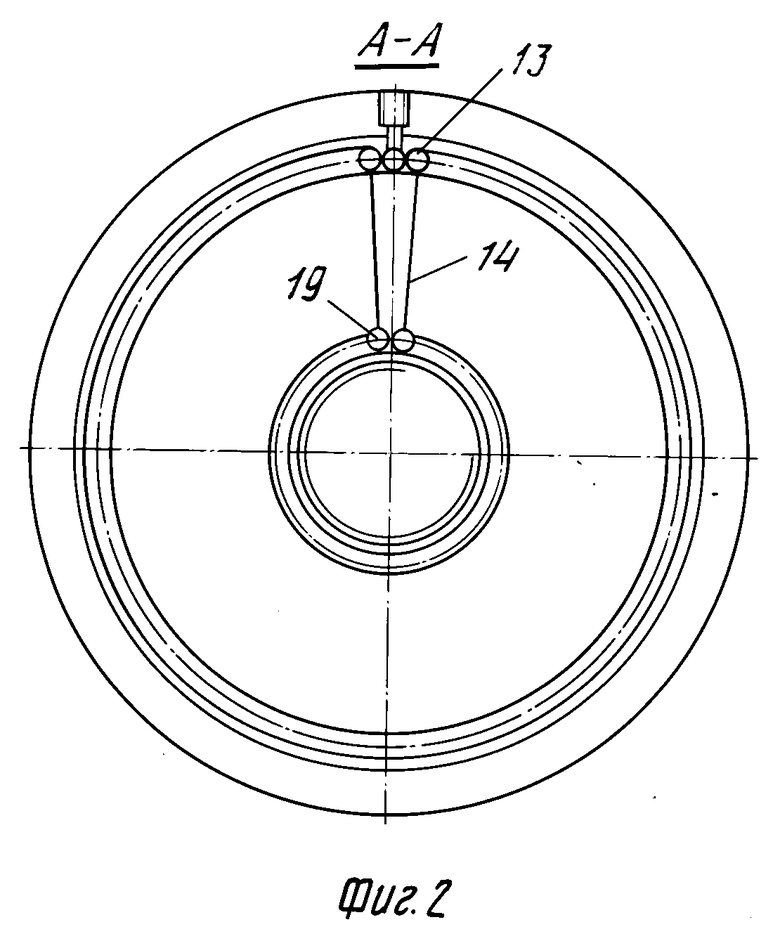
На фиг. 1 показан копировальный щуп с трехкоординатной следящей системой управления измерением; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - выносной узел.
Щуп копировальный с трехкоординатной следящей системой управления измерением содержит корпус 1 с демпфирующей жидкостью, пустотелый стержень 2, на котором укреплены контакты 3, 4 датчиков 5, 6 по осям X и Y. На другом конце внутри стержня 2 установлен перемещающийся посредством шаровой втулки 7 палец 8 с контактом 9 датчика 10 по оси Z. Стержень 2 подвешен на корпусе 1 с помощью разрезных опор 11, 12 шариков 13 и струн 14.
После установки шариков 13 в разрезные опоры 11, 12 они фиксируются и устанавливаются в корпус 1, в шариках имеется резьба и шестигранные углубления под ключ. На стержне 2 нарезана резьба левая и правая, на которую устанавливают разные опоры 15, 16, 17, 18 с внутренней резьбой левой и правой с шариками 19. Струны 14 вворачиваются в шарики 13 и 19. Датчики x и y выполнены в отдельных корпусах 20, которые укреплены на корпусе 1 и с помощью гайки 21 возможна их осевая настройка. Механизм регулировки веса выполнен на втулке 22 в виде двух торцевых гаек 23, 24 и тарированной пружины 25.
С помощью кольца 26 возможна точная настройка 0. В конструкции щупа предусмотрен аварийный контакт по оси Z, выполненный в виде двух колец 27, 28 и пружин 36 и 29, а по осям X и Y аварийный контакт выполнен в виде кольца 30 и пустотелого стержня 2. На крышке с помощью стоек установлены усилители для датчиков x, y.
Щуп копировальный с трехкоординатной следящей системой управления измерением работает следующим образом: закрепляют на станине станка. Палец 8 вводят в контакт с моделью 31. При работе по контуру одновременно с глубинным фрезерованием работают три датчика 5, 6, 10 перемещения контактов 9, 32, 33, это приводит к формированию линейно-измеряющего выходного напряжения в диапазоне линейных перемещений датчиков 5, 6, 10.
Направления движения может быть зарегистрировано с помощью фазовой демодуляции выходного напряжения по отношению к напряжению обмотки. Система управления питания датчиков 5, 6, 10 электромеханическая передача охвачена обратной связью по положению, скорости, току.
В работе по строке работает датчик 10 по оси Z. При перемещении стержня 2 и втулки 22 более допустимого значения в радиальном и осевом направлении с помощью колец 27, 28, 30 по осям X, Y, происходит отключение станка. При установке пальца 8 разного веса предусмотрен механизм регулировки веса с помощью регулировочной гайки 34 и штифта 35.
Сборка механизма регулировки веса производится путем вворачивания одного витка тарированной пружины 25 в торцовые гайки 23 и 24 до бурта, ширина канавки которых равна диаметру проволоки. При потере механической точности щупа предусмотрена возможность регулировки с помощью струн 14, для этого необходимо вывернуть пробки, слить демпфирующую жидкость и с помощью тензометрического шестигранного ключа установить у струн 14 нужный натяг. Если этого будет недостаточно, то, вращая стержень 2 вправо или влево, можно добиться необходимой жесткости струнного подвеса.
Предлагаемый щуп позволяет повысить точность измерения путем обеспечения регулировки демпфирующего элемента типа струнный подвес, расширить функциональные возможности пpименения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для КОНТРОЛЯ чистоты | 1972 |
|
SU333777A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ | 2007 |
|
RU2364487C1 |
| КОПИРОВАЛЬНЫЙ СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ ОБЪЕМНЫХ ЭЛЕМЕНТОВ | 1972 |
|
SU354985A1 |
| Аэростатический измеритель линейных перемещений | 2024 |
|
RU2829305C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СДВИГОВ | 1992 |
|
RU2044261C1 |
| Гидравлический копировальный золотник | 1954 |
|
SU111924A1 |
| Трехкоординатная измерительная головка | 1987 |
|
SU1441157A1 |
| Станок для копировальной обработки | 1981 |
|
SU998095A1 |
| Распределительно-демпфирующий агрегат управления | 1991 |
|
SU1810230A1 |
| Копировальный прибор | 1981 |
|
SU990475A1 |

Изобретение относится к измерительной технике, к типовым функциональным узлам измерительной оснастки. Щуп копировальный с трехкоординатной следящей системой управления измерением содержит корпус 1, закрепленный на станине станка с жидкостной демпфирующей камерой и пустотелым стержнем 2, на наружнем конце которого укреплены контакты 3, 4, связанные с датчиками 5, 6 положения по осям X и Y. На другом конце внутри стержня 2 установлен перемещающийся посредством шаровой втулки 7 в осевом направлении палец 8, связанный через механизм регулировки весом 23, 24, 25 с контактом 9 датчика 10. Повышение точности измерения достигается путем обеспечения регулировки жесткости демпфирующего элемента, состоящего из разрезных опор 11,12,15,16,17,18 шариков 13 и 19 и струн 14. Перемещение контактов 9,32,33 приводит к формированию линейно-измеряющего выходного напряжения в диапазоне линейных перемещений датчиков 5,6,10. Направление движения может быть зарегистрировано с помощью фазовой демодуляции выходного напряжения по отношению к напряжению обмотки. Система управления питания датчиков 5,6,10. Электромеханическая передача охвачена обратной связью по положению, скорости и току. 3 ил.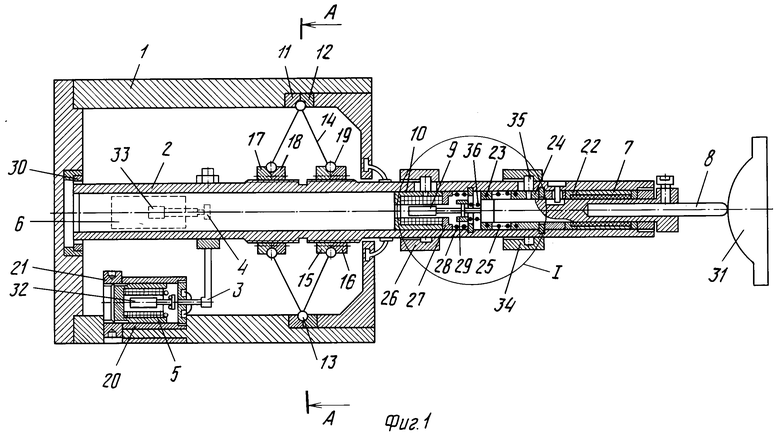
КОПИРОВАЛЬНЫЙ ЩУП С ТРЕХКООРДИНАТНОЙ СЛЕДЯЩЕЙ СИСТЕМОЙ УПРАВЛЕНИЯ ИЗМЕРЕНИЕМ, содержащий полый корпус с жидкостной демпфирующей камерой, размещенный в камере полый стержень с контактами на одном конце, размещенную на другом конце стержня шаровую втулку, установленный в ней с возможностью осевого перемещения палец, предназначенный для взаимодействия с контролируемой поверхностью, размещенные в корпусе датчики положения по осям X и Y, взаимодействующие с соответствующими контактами стержня, размещенные на стержне механизм регулирования веса и датчик положения по оси Z, взаимодействующий посредством механизма регулирования веса с пальцем, отличающийся тем, что механизм регулирования веса выполнен в виде расположенных на стержне с возможностью относительного перемещения двух торцевых гаек с уступами на врутренней поверхности, размещенной между гайками тарированной пружины, закрепленной своими концами в уступах соответствующих гаек, на наружной поверхности стержня нанесены левая и правая резьбы, щуп снабжен размещенным в демпфирующей камере демпфирующим элементом типа струнного подвеса, выполненным в виде трех разрезных опор, две из которых размещены на соответствующих резьбах стержня, а третья - на внутренней поверхности корпуса, шаров по числу опор, расположенных в плоскости разреза соответствующей опоры, и струн, соединяющих шары опор стержня с шаром опоры корпуса, и механизмом осевой настройки датчиков положения по осям X и Y, выполненным в виде винтовых гаек.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Коопировальный Шуп фирмы "Ионеда" Япония, 1989. | |||
