1
Изобретение относится к судостро ению и касается конструирования сис тем управления главными двигателями судовой силовой установки и винтом регулируемого шага.
Известна система управления глав- ными двигателями судовой силовой установки и винтом регулируемого шага, содержащая датчики частоты вращения и мсящости и регуляторы частоты вращения двигателей, механически связанные с сервомоторами, коммутаторы, мехатзм изменения шага винта с блоком управления, а также датчики дифферента, первой производной дифферента, скорости вертикального перемещения центра тяжести судна, фактической скорости движения, шага винта и частоты вращения валопровода и задатчики скорости хода с каналами связи,подключенйыми к вычислительному устрой- ству,1.
Недостаток указанной системы заключается в узком диапазоне регулирования параметрами движения и низкой надежности в работе.
Цель изобретения - расширение днапазона регулирования параметров движения и надежности в работе.
Цель достигается тем, что система управле1вдя снабжена блоками прогнозирования, контроля и представления (информация и блоками управления сервомоторов, при зтом вычислительное устройство связано с блоком прогнозирования, выходы которого подключены к датчикам дифферента, первой производной дифферента и скорости вертикального перемещения центра тяжести судна, в выходы через блоки управления сервомоторов, воздействуняцих на регуляторы частоты вращения двигате-. лей, связаны с блоком управления механизмом изменення пага винта,при зтом вход блока контроля связан с выходами датчиков частоты вращения двигателей, датчиков их мощности и коммутаторов, а выход блока контро,ля - с вхсздом вычислительного устройства.
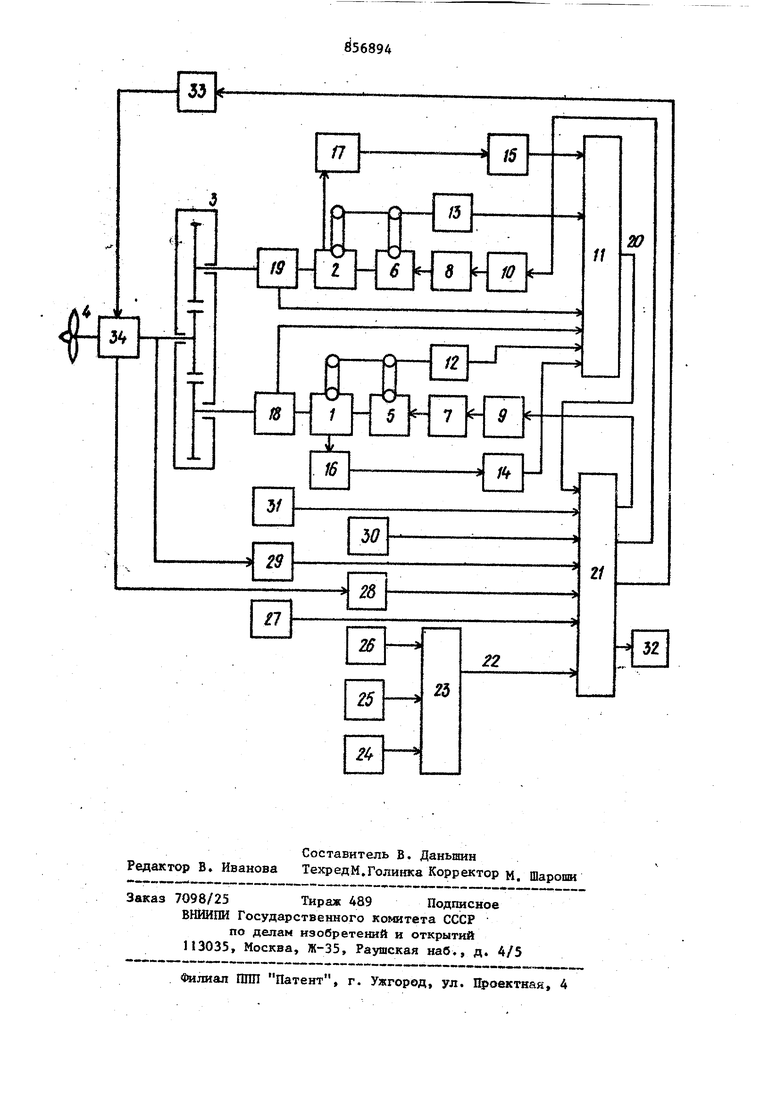
На чертеже представлена функциональная схема системы.
Предлагаемая система содержит главные двигатели 1 и 2, кинематически свяэан1&1е через редукторный агрегат 3 с гребным винтом 4 регулируемо го шага, регуляторы 5 и 6 частоты вращения, сервомоторы 7 и 8 с блоками 9 и 10 управления, контур кон роля параметров двигателей, включающий в себя блок I контроляS датчики 12 и 13 мощности, коммутаторы 14 и 15, блоки датчиков 16 и 57 индикаторного давления, .датчики 18 и 19 частоты вращения, канал 20 связи с вычислительным устройством 21. канал 22 связи с блоком 23 прогнозирования возмущающих возде Гствий, содержа1дай датчики дифферента 24, первой производной 25 дифферента, скорости вертикального перемещения 26 центра тяжести судна. Система также содержи датчики фактической скорости хода 27 судна, шага 28 винта, оборотов валопровода 29 гребного винта, з атчики реяима 30 работы, скорости ЗГ хода, а также блок 32 представления информации, блок 33 управления механизмом изменения шага и механизм 34 изменения шага винта.
Система работает следующим образом.
После запуска двигателей 1 и 2 и ввода их в режим, в зависимости от положения задатчика 30 режима работы судна, например пуск главных двигателей, ход в свободной воде, ход с тралом, стоп главных двиГателей, аварийный режим управляющее вычислительное устройство 21 ( УВУ) получает соответствукицую команду для реализации законов управления главными двигателями, винтом регулируемого шага, прогнозируемых моделей и программ адаптации управления, согласно разработанным алгоритмам с учетом информации о текущих и прогнозируемых значениях возмущающих воздействий,которые поступают от датчиков дифферента 24 судна, первой производной 25 дифферента и скорости вертикального 26 перемещения центра тяжести судна, которая с выхода блока 23 прогнозирования возмущающих воздействий поступает по каналу 22 связи на вход УВУ (предварительно пройдя через коммутатор, аналого-циф
ровой преобразователь, преобразователь кодов).
В результате полученной информации о текущих и прогнозируемых значениях возмущающих воздействий УВУ организует управление винтом 4 регулируемого шага путем подачи управляющего воздействия на механизм 34 изменения шага, посредством блока 33 управления механизмом изменения шага Суть управления сводится к отслеживанию волны по прогнозируемому дифференту судна с целью стабилизации колебаний мощности на винте с помощью изменения шага винта. В момент времени, когда дифферент судна положи тельный (судно идет на волну) , шагвинта уменьшается, а при отрицательном дифференте (судно идет с волны формируется команда на увеличение шага винта, при этом среднее значение движущего момента на валу гребного винта остается постоянным. При отклонении оборотов двигателей и гребного вала от заданных значений с датчиков частоты вращения 18 и 19 двигателей и валопровода 29 поступает информация через блок }1 контроля параметров по каналу 22 связи I на вход УВУ, который осуществляет коррекцию оборотов двигателей путем подачи сигналов на входы сервомоторов 7 и 8, которые механически связаны с регуляторами 5 и 6 частоты вращения.
Распределение мощности между двигателями 1 и 2, работающими на редукторный 3 агрегат, осуществляется на основе информации о текущих значениях мощности дизелей, поступающей от датчиков 12 и 13 мощности с учетом технического состояния двигателей, при этом учитывается нагрузка двигателей, по цилиндрам с помощью датчиков 16 и 17 индикаторного давления,которые связаны с УВУ при помощи коммутаторов 14 и 15. Для текущего контроля работы силовой установки предусмотрен блок 32 представления информации, в сбстав которого входят цифропечатающее устройство и дисплей.
Использование предлагаемого устройства позволяет стабилизировать колебания мощности двигателей за счет стабилизации момента сопротивления на гребном валу до 3-4% ( вместо ;15-17% при существующих устройства) при ходе судна на волнении мрря 5-6 58 баллов, тем самым устранить перегруз ку двигателей не только на долевых режимах, но и в номинальном, повысит моторесурс дизелей и в целом надежност работы судовой силовой установки за счет улучшения качества процессов газообмена, распыливания. Формула изобретения Система управления главными -двига телями судовой силовой установки и винтом регулируемого шага, содержа щая датчики частоты вращения и мощности и регуляторы частоты вращения двигателей,механически связанные с сервомоторами, коммутаторы, механизм изменения шага винта с блоком управления, а также датчики дифферен та, первой производной дифферента. скорости вертикального перемещения центра тяжести судна, фактической скорости движения, шага винта и частоты вращения валопровода и задатчик скорости хода с каналами связи, подключенными к вычислительному устройству, отличающаяся тем. что, с целью расширения диапазона регулирования параметров движения и повышения надежности в работе,она снабжена блоками соответственно нозирования, контроля и представления информации и блоками управления сервомоторов, этом вычислительное устройство связано с блоком прогнозиг рова{шя, входы которого пoдкJtoчeны к датчикам дифферента, первой производной дифферента и скорости вертикального перемещения центра тяжести судна, а выходы через блоки управления сервомоторов, воздействующих на регуляторы частоты враще{в1Я дви- гг телей, св язаны с блоком управления механизмом изменения шага винта,при этом вход блока ;сонтроля связан с выходами датчиков частоты вращения двигателей, датчиков их мощнос-т и коммутаторов, а выход блока контроля - с входом вычислительного устройства. Источники информации, ринятые во внимание при экспертизе 1. Патент Японии f 39-929, опубл. 1963 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления главными двигателями судовой силовой установки и винтом регулируемого шага | 1981 |
|
SU990587A2 |
| Устройство автоматического управленияпРОпульСиВНОй уСТАНОВКОй СудНА СВиНТОМ РЕгулиРуЕМОгО шАгА | 1979 |
|
SU829480A1 |
| Система регулирования теплосиловой установки | 1982 |
|
SU1019079A1 |
| Устройство для автоматического управления пропульсивной установкой судна с винтом регулируемого шага | 1980 |
|
SU919937A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ГЛАВНОГО СУДОВОГО ДВИГАТЕЛЯ И ГРЕБНОГО ВИНТА РЕГУЛИРУЕМОГО ШАГА | 1991 |
|
RU2037181C1 |
| Система дистанционного автоматизированного управления режимами работы комплекса "главный" судовой турбоагрегат-винт регулируемого шага- навешенный генератор | 1977 |
|
SU779179A1 |
| Система дистанционного управленияСудОВОй СилОВОй уСТАНОВКОй | 1979 |
|
SU822146A1 |
| СИСТЕМА КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА В РЕЖИМАХ АВТОМАТИЧЕСКОГО И ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2020 |
|
RU2741669C1 |
| СУДОВАЯ ВАЛОГЕНЕРАТОРНАЯ УСТАНОВКА | 2013 |
|
RU2535768C1 |
| Устройство для управления работой судового двигателя и гребного винта регулируемого шага | 1983 |
|
SU1128227A1 |