Изобретение относится к области машиностроения и может быть использовано при создании нромышленных роботов.
Цель изобретения - повышение быстродействия устройства за счет упрощения ал- 5 горитма вычисления сигналов коррекции.
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - функциональная схема вычислительного блока.
Устройство содержит блок 1 задания программы, первый сумматор 2, первый усили- тель 3, привод 4 вращения, первый датчик 5 положения, второй сумматор 6, второй усилитель 7, привод 8 радиального вращения, второй датчик 9 положения, датчик 10
Ui Kmoqx-,
где К - масштабирующий коэффициент; гпо- масса переносимого объекта; О, - угловое ускорение; X - сигнал, пропорциональный координате радиального перемещения.
Этот сигнал поступает на третий вход первого сумматора 2.
Применение предлагаемого- устройства позволяет за счет исключения блока вычисления .массы перемещаемого груза повысить быстродействие оценивания массы транспортируемого объекта и, следовательно, улучшить динамические характеристики испол20
25
30
ускорения, дифференциатор 11, выпрямитель 5 нительной системы промышленного робота. 12, ждущий мультивибратор 13, блок 14 выборки-запоминания, вычислительный блок 15,Формула изобретения датчик 16 веса объекта.
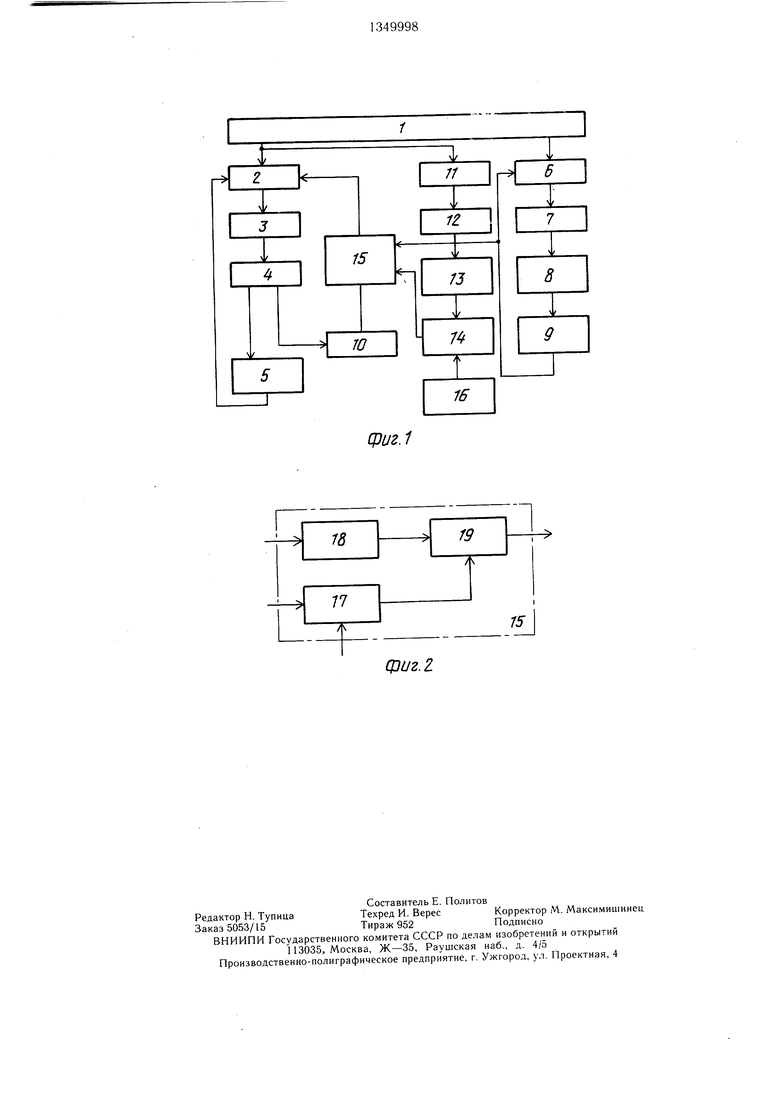
Вычислительный блок (фиг. 2) содержит первый умножитель 17, квадратор 18, второй умножитель 19.
Устройство работает следующи.м образо.м.
В соответствии с программой технологического цикла, хранящейся в блоке 1 задания програм.мы, на первом его выходе появляется сигнал, соответствующий требуемому перемещению привода 4 вращения. Этот сигнал сравнивается в первом сумматоре 2 с сигналом от первого датчика 5 положения и сформированная onjH6Ka U поступает через первый усилитель 3 на привод 4 вращения, который начинает движение. Одновре.менно на второ.м выходе блока 1 задания программы появляется сигнал, соответствующий заданному перемещению п)ивода 8 радиального перемещения который приводит его в движение. Сигнал, пропорц.чоиальный ускорению q, формируется датчиком 10 ускорения и поступает на первьш вход блока 15 вычисления сигналов коррекции.
В начальный момент движения про- мьппленного робота датчик 16 веса объекта формирует сигнал, пропорциональный массе переносимого объекта. Запись этого сигнала в блок 14 выборки-запоминания происходит через установленный интервал времени ti после начала движения рабочего органа манипулятора. Время ti определяется инерционностью датчика 16 и составляет десятые - сотые доли .миллисекунды.
Выходной сигнал блока 14 выборки-запоминания поступает на второй вход блока 15, на третий вход которого подается сигнал, пропорциональный координате радиального перемещения. Блок 15 формирует сигнал, пропорциональный динамическому моменту нагрузки, создаваемому инерционностью переносимого объекта.
35
40
45
50
1.Устройство для управления промышленным роботом, содержащее последовательно соединенные блок задания программы, первый су.мматор-, первый усилитель и привод вращения, связанный с датчиком ускорения и первым датчиком положения, выход которого подключен к второму входу первого сумматора, последовательно соединенные дифференциатор, выпрямитель, ждущий мультивибратор и блок выборки и запоминания, а также последовательно подключенные второй сумматор, второй усилитель и привод радиального перемещения, связанный с вторым датчиком положения, который соединен выходом с первым входом второго сумматора, второй вход которого подключен к второму выходу блока задания программы, соединенного первым выходом с входом дифференциатора, отличающееся те.м, что, с целью повыщения быстродействия устройства, оно содержит датчик веса объекта и вычислительный блок, выход которого соединен с третьим входом первого сумма- гора, первый вход - с выходом второго датчика положения, второй вход - с выходом датчика ускорения, а третий вход - с выходом блока выборки и запоминания, подключенного вторым входом к выходу датчика веса объекта.
2.Устройство по п. 1, отличающееся тем, что вычислительный блок содержит квадратор и последовательно соединенные первый умножитель и второй умножитель, второй вход которого подключен к выходу квадратора, соединенного входом с nepBbi.vi в.хо- дом вычислительного блока, подключенного вторым и третьим входа.ми к первому и второму входам первого у.множителя соответственно, а выходо.м - к выходу второго умножителя.
Ui Kmoqx-,
где К - масштабирующий коэффициент; гпо- масса переносимого объекта; О, - угловое ускорение; X - сигнал, пропорциональный координате радиального перемещения.
Этот сигнал поступает на третий вход первого сумматора 2.
Применение предлагаемого- устройства позволяет за счет исключения блока вычисления .массы перемещаемого груза повысить быстродействие оценивания массы транспортируемого объекта и, следовательно, улучшить динамические характеристики испол нительной системы промышленного робота. Формула изобретения
0
5
0
5
0
5
0
1.Устройство для управления промышленным роботом, содержащее последовательно соединенные блок задания программы, первый су.мматор-, первый усилитель и привод вращения, связанный с датчиком ускорения и первым датчиком положения, выход которого подключен к второму входу первого сумматора, последовательно соединенные дифференциатор, выпрямитель, ждущий мультивибратор и блок выборки и запоминания, а также последовательно подключенные второй сумматор, второй усилитель и привод радиального перемещения, связанный с вторым датчиком положения, который соединен выходом с первым входом второго сумматора, второй вход которого подключен к второму выходу блока задания программы, соединенного первым выходом с входом дифференциатора, отличающееся те.м, что, с целью повыщения быстродействия устройства, оно содержит датчик веса объекта и вычислительный блок, выход которого соединен с третьим входом первого сумма- гора, первый вход - с выходом второго датчика положения, второй вход - с выходом датчика ускорения, а третий вход - с выходом блока выборки и запоминания, подключенного вторым входом к выходу датчика веса объекта.
2.Устройство по п. 1, отличающееся тем, что вычислительный блок содержит квадратор и последовательно соединенные первый умножитель и второй умножитель, второй вход которого подключен к выходу квадратора, соединенного входом с nepBbi.vi в.хо- дом вычислительного блока, подключенного вторым и третьим входа.ми к первому и второму входам первого у.множителя соответственно, а выходо.м - к выходу второго умножителя.
фиг.1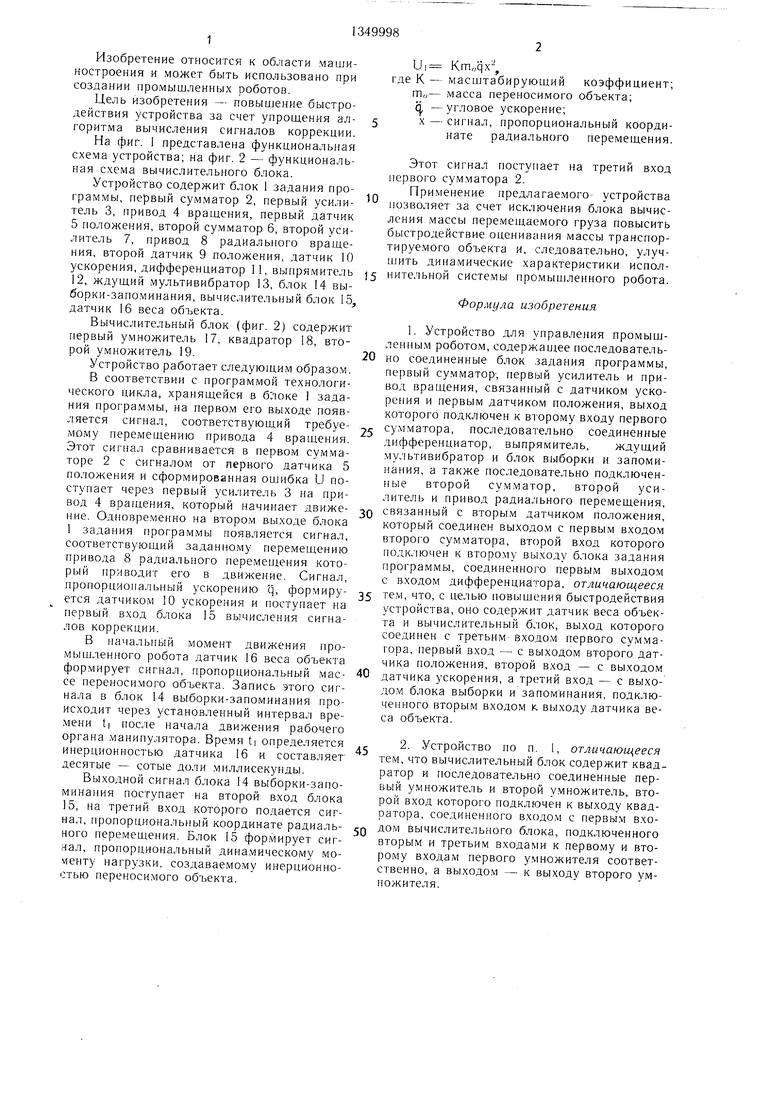
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления промышленным роботом | 1984 |
|
SU1170428A1 |
| Устройство для управления промышленным роботом | 1989 |
|
SU1646851A1 |
| Устройство для управления промышленным роботом | 1985 |
|
SU1271739A1 |
| Устройство для управления промышленным роботом | 1986 |
|
SU1472249A1 |
| Устройство для управления манипулятором | 1981 |
|
SU991367A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМ ТРАНСПОРТНО-ПОГРУЗОЧНЫМ МАНИПУЛЯТОРОМ | 1990 |
|
RU2009883C1 |
| Устройство для автоматического управления роботом-манипулятором | 1986 |
|
SU1403016A1 |
| Устройство для управления роботом | 1988 |
|
SU1618636A1 |
| ЭЛЕКТРОПРИВОД С АВТОМАТИЧЕСКОЙ ПОДСТРОЙКОЙ ЧАСТОТЫ ВХОДНОГО ГАРМОНИЧЕСКОГО СИГНАЛА | 2008 |
|
RU2399079C2 |
| Устройство для управления электроприводом робота | 1989 |
|
SU1664548A1 |
Изобретение относится к области машиностроения и может быть использовано при создании промышленных роботов. Целью изобретения является повышение быстродействия устройства за счет упрошения алгоритма вычисления сигналов коррекции. Для этого в устройство, содержащее блок задания программы, привод вращения, связанный с первым датчиком положения и с датчиком ускорения, привод радиального перемещения, связанный с вторым датчиком положения, блок выборки-запоминания, а также соответствуюш,ие усилители и сумматоры, введены датчик веса объекта, и вычислительный блок, связанные с блоком выборки-запоминания. Кроме того, вычислительный блок связан с датчиком ускорения, вторым датчиком положения и входом привода вращения. Вычислительный блок формирует сигнал, пропорциональный динамическому моменту нагрузки, создаваемому инерционностью объекта манипулирования. Этот сигнал используется для управления приводом вращения. 1 з.п. ф-лы, 2 ил. I сл О5 N со со ;о 00
фиг. 2.
| Устройство для управления промышленным роботом | 1976 |
|
SU619331A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для управления промышленным роботом | 1984 |
|
SU1170428A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
