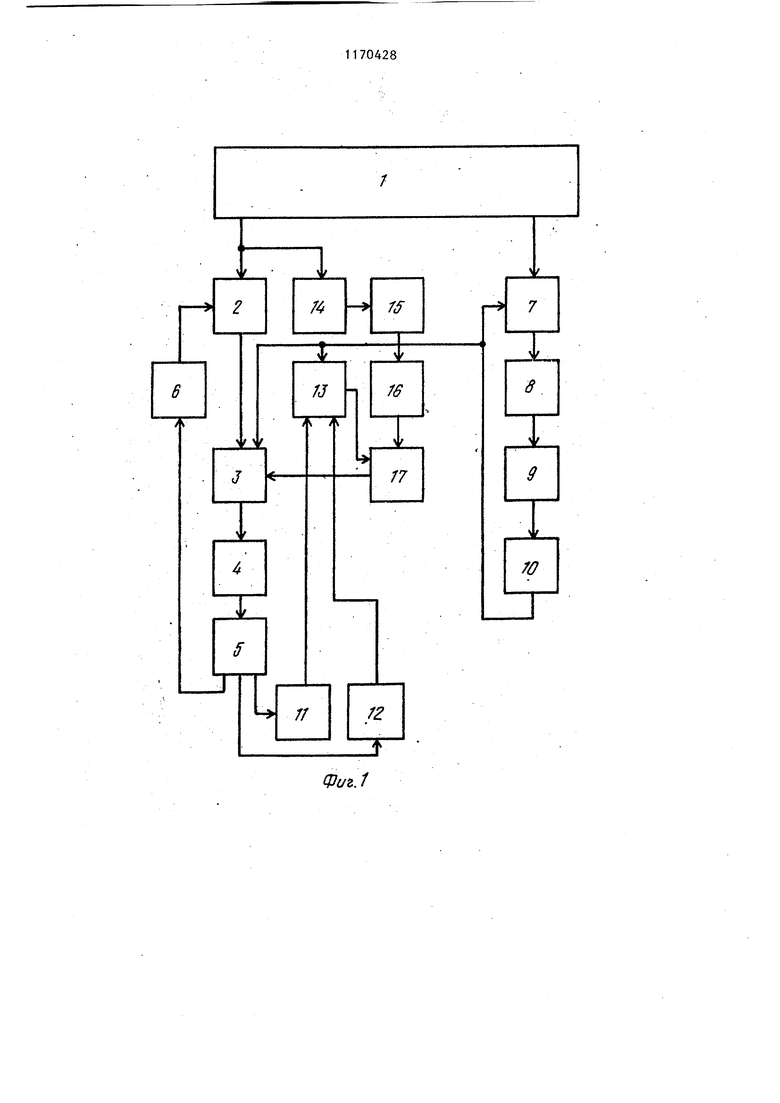
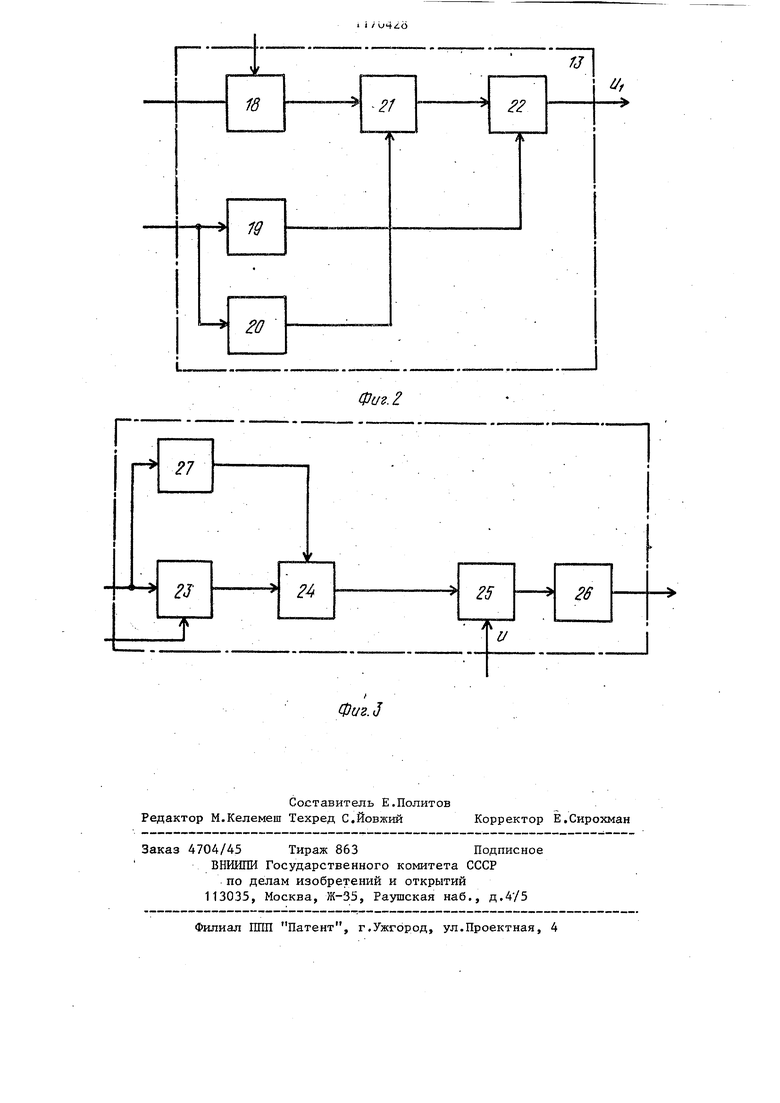
111 Изобретение относится к робототехнике и может быть использовано дл автоматического позиционного управле НИН приводами промышленного робота. Целью изобретения является повыше ние быстродействия за счет оптимизации торможения привода промышленного робота в зависимости от массы перено симого объекта. На фиг.1 представлена блок-схема предлагаемого устройства; на фиг.2 то же, блока вычисления массы; на фиг.З - то же, блока вычисления момента инерции. Устройство содержит.(фиг.1) блок 1 задания программы, первый сумматор 2, блок 3 вычисления момента инерции первый усилитель 4, привод 5 вращения, первый датчик 6 положения, второй сумматор 7, второй усилитель 8, привод 9 радиального перемещения, второй датчик 10 положения, датчик 1 момента, датчик 12 ускорения, блок 13 вычисления массы, дифференциатор 14, вьшрямитель 15, ждущий мультивибратор 16, блок 17 выборки-запоминания. Блок вычисления массы (.2) включает первый делитель 18, первый 19 и второй 20 квадраторы, сумматор 21 и второй делитель 22. На фиг.З указаны функциональный блок 23, сумматор 24, делитель 25 и блок 26 фиксации уровня. Устройство работает следующим образом. Б соответствии с программой техно логического цикла,Охраняющейся в блок 1 задания програм1 1ы,%. на первом его выходе появится сигнал, соответствующий требуемому перемещению привода ,3 вращения. Этот сигнал сравнивается в первом сумматоре 2 с сигналом от первого датчика 6 положения и сформи рованная ошибка и поступает в блок 3 вычисления момента инерции. На выходе последнего появится постоянный сигнал и.д, полярность которого определяется знаком сигнала ошибки U. Сигнал усиливается первым усилителем 4 и приводит в движение привод 5 вращения. Сигналы, пропорциональны моменту , развиваемому приводом 5, и ускорению w, формируются соответственно датчиками 11 и 12 момента и ускорения и поступают на блок 13; вычисления массы, на третий вход которого подается сигнал, пропорцио-.. нальный координате, радиального пере82мещения. Блок 13 вычисления массы формирует сигнал, пропорциональнш массе переносимого объекта ГМАв-Мс1 и ,-(a-x)(b +х)2,. где Мдд - момент сил относительно оси вращения; Мс - момент сил сопротивления и опорах; ,c/u) ц; - угловое ускорение; X - сигнал, пропорциональный координате радиального перемещения .IP - момент инерции вращающихся частей промышленного робота относительно центра инерции , . а,Ь - постоянные, для конкретной конструкции манипулятора, параметры5 т, - масса вращающихся частейК - масштабирующий коэффициент. Через заранее установленньш; интервал времеш .t,, после появления сигна « первом выходе блока 1 задания, программы происходит запись сигнала и в блок 17 выборки-запоминания.Причем t выбирается из условия /ю(Ц)/ , что обеспечивает требуемую точность вычисления массы объекта. По окончании п.1эоцесса разгона привод 5 осуществляет движение с постоянной скоростью, определяемой фиксированным уровнем сигнала U на выходе блока 3 вычисления момента инерции. Блок 3 вьиисления момента инерции осуществляет сравнение сигнала у Ки/1 с заранее установленным уровнем и , и при выполнении условия , на его выходе появляется сигнал у , которьй начинает торможеш1е привода 5 вращения (здесь (5+(a-x)(b+ +x)2U - сигнал, пропорциональтш моменту инерции вращающихся частей). Блоки 23, 24, 25, 26 и 27 выполняют следующие операции: блок 23 - у, (b+x)2U-, ; блок 27 - у(, блок 24 - +у блок 25 - Yj KU/i, где и - сигнал ошибки с выхода первого сумматора 2, К - масштабирующ й коэффициент; блок 26 при Yj 7/ DO -U(5 при , к Uo у при Таким образом, процесс торможения начинается тем раньше, и следовательно, тем дальше от точки позиционирования, чем больше величина сигнала у.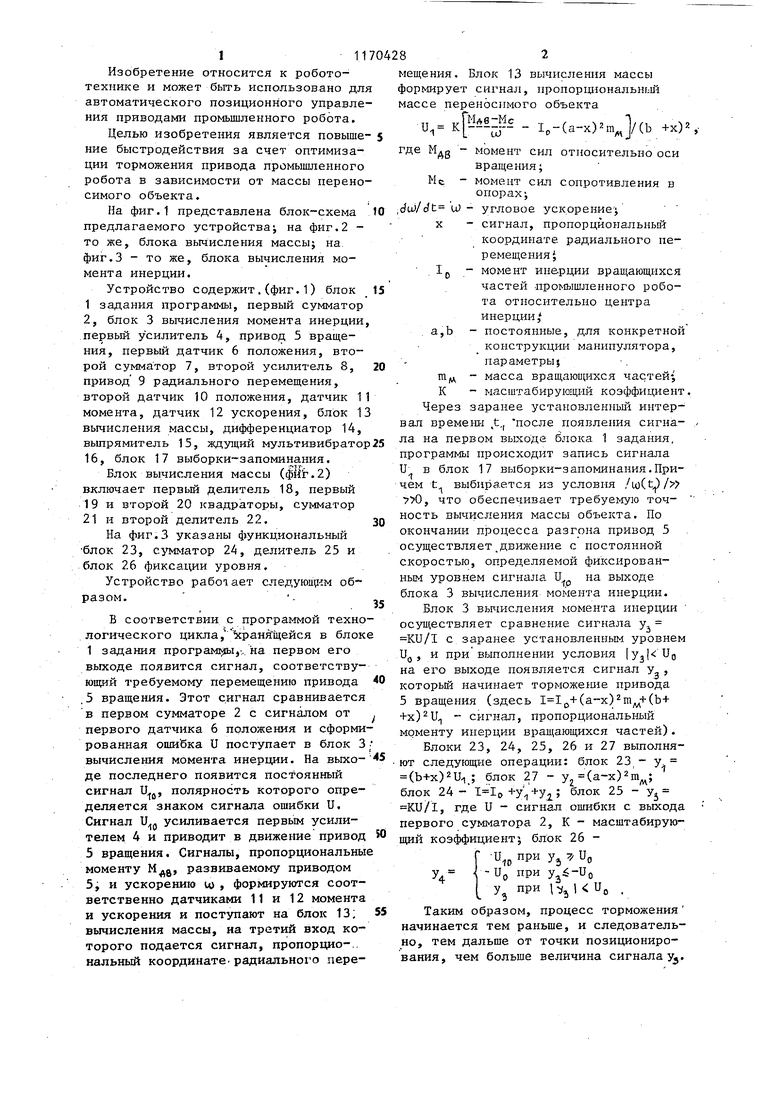
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления промышленным роботом | 1986 |
|
SU1349998A1 |
| Устройство для управления промышленным роботом | 1985 |
|
SU1271739A1 |
| Устройство для управления промышленным роботом | 1989 |
|
SU1646851A1 |
| Устройство для автоматического управления роботом-манипулятором | 1986 |
|
SU1403016A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2004 |
|
RU2258599C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2004 |
|
RU2257288C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2003 |
|
RU2228257C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2057001C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2007 |
|
RU2355563C2 |
| ЭЛЕКТРОПРИВОД С АВТОМАТИЧЕСКОЙ ПОДСТРОЙКОЙ ЧАСТОТЫ ВХОДНОГО ГАРМОНИЧЕСКОГО СИГНАЛА | 2008 |
|
RU2399079C2 |
1. УСТРОЙСТВО ДЛЯ ,УПРАВЛЕНИЯ ПРОМЫШЛЕННЬМ РОБОТОМ, содержащее последовательно соединенные блок зада ния программы, первый сумматор, блок вычисления момента инерции, первый усилитель, привод вращения и первый датчик положения, выход которого подключен к второму входу первого сумматора, а также последовательно соединенные второй сумматор, второй усилитель, привод радиального перемещения и второй датчик положения, выход которого подключен к второму входу блока вычисления момента инерции и к первому входу второго сумматора, соединенного вторым входом с вторым выходом блока задания программы, отличающееся тем, что,, с целью повышения быстродействия устройства, оно содержит механически связанные с приводом вращения датчики момента и ускорения, блок вычисления массы и последовательно соединенные дифференциатор, выпряьштель, ждущий мультивибратор и блок выборки запо№1нания, причем первый, второй и третий входы блока вычисления массы подключены соответственно к выходам датчиков момента и ускорения и второго датчика положения, а выход - через блок выборки-запоминания к TpeTbeNry входу блока вычисления момента инерции, вход дифференциатора соединен с первым выходом блока S задания программы.(Л 2. Устройство по п.1, о т л и чающееся тем, что блок вычисления массы содержит первый и второй квадраторы и последовательно соединенные первый делитель, сумматор и второй делитель, выход которого подключен к выходу блока вычислеш1я мас сы, а второй вход - к выхоДу первого квадратора, соединенного входом с 4;: третьим входом блока вычисления масN5 сы и входом второго квадратора, выход 00 которого подключен к второму входу сумматора, а первьй и второй входы блока вычисления массы соединены с соответствующими входами первого делителя .
Фиг.1
18
f -
2
| Устройство для управления промышленным роботом | 1976 |
|
SU619331A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для автоматического управления роботом-манипулятором | 1975 |
|
SU597552A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
