Изобретение относится к автоматичасиому управлению объектами с переменным гидравлическим сопротив-лением и может быть использовано при автоматическом управлении технологиче скими процессами в химической, нефтехимической и других отраслях народного хозяйства.
Цель изобретения - повышение надежности и производительности систе- мы.
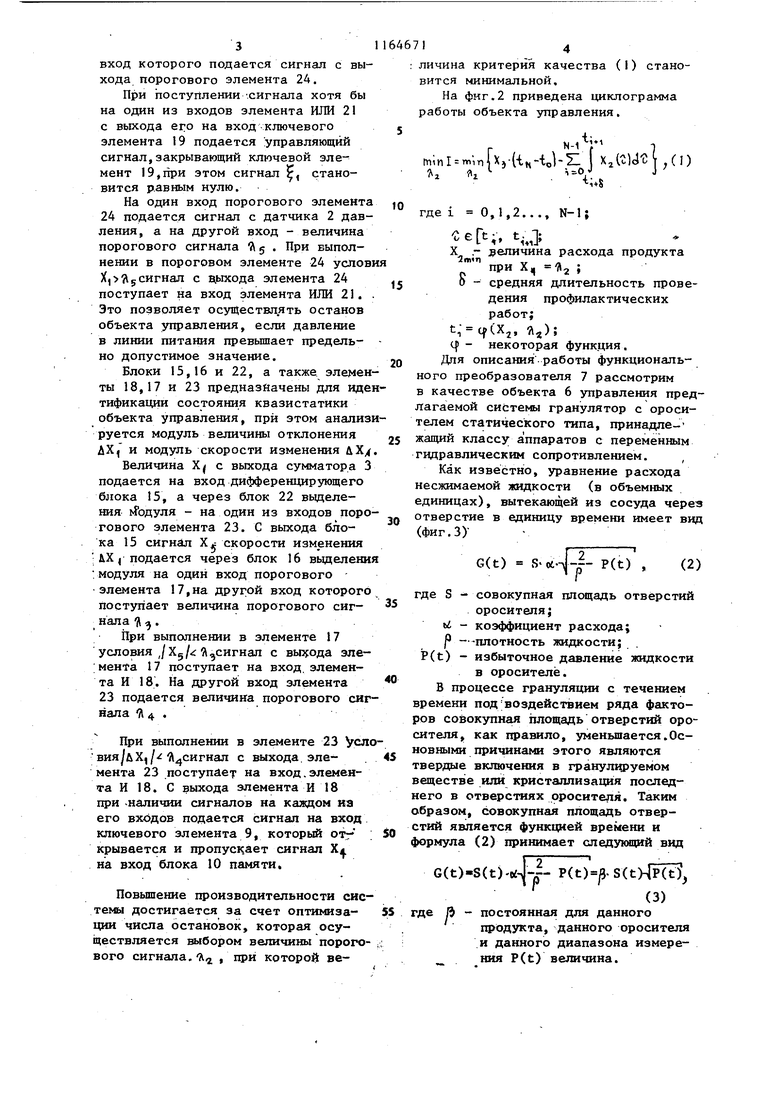
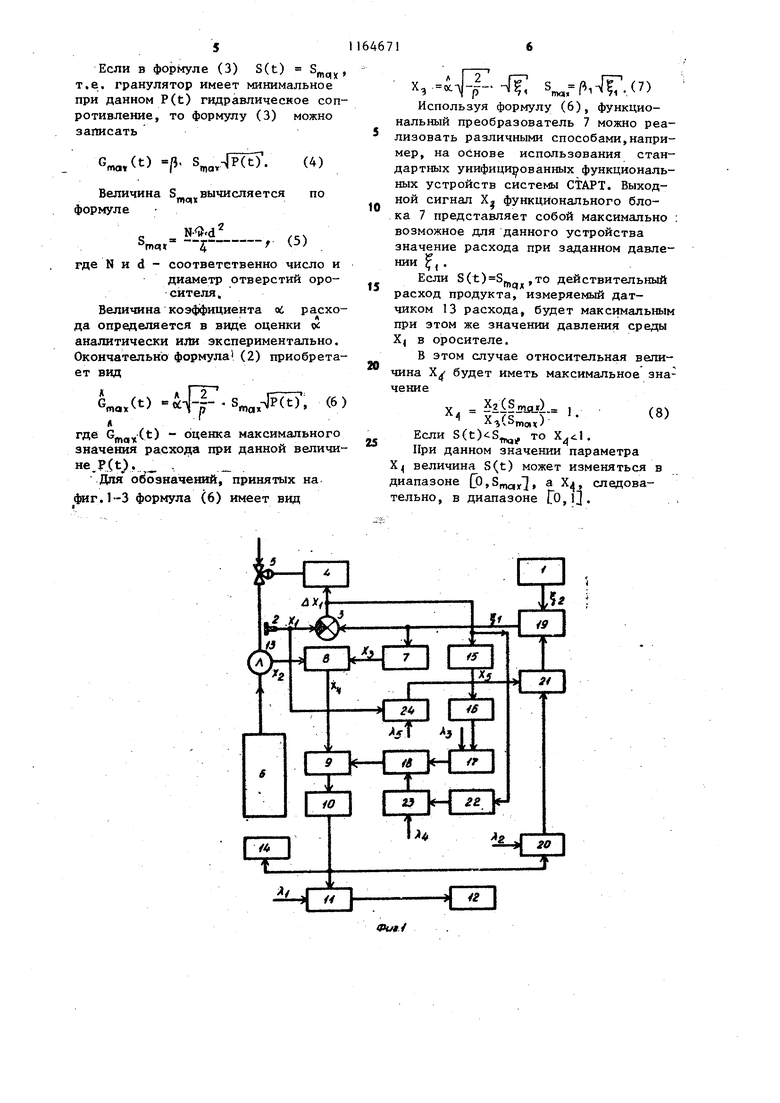
На фиг.1 показана блок-схема системы; на фиг,2 - циклограмма работы аппарата; на фиг.З - объект управления с переменным гидравлическимсопротивлением.
Блок-схема содержит блок 1 задания, датчик 2 давления, сумматор 3, регулятор 4 давления, исполнительный механизм 5, объект 6 управления, функциональный преобразователь 7, делитель 8, в торой ключевой элемент 9, блок 10 памяти, четвертый пороговый элемент 11, блок 12 сигнализации, датчик 13 расхода, блок 14 регистрации, дифференцирукмций блок 15, первьй блок 16 вьщеления модуля, второй пороговый элемент 17, элемент И 18, первый ключевой элемент 19, первый пороговый элемент 20, элемент ИЛИ 21, второй блок 22 ввделения модуля, третий порговьй элемент 23 и пятый пороговый элемент 24,
На фиг.1 обозначены: выход X. датчанка давления, выход Х датчика расхода, выход Х, функционального преобразователя, выход Х делителя, выходной сигнал Х дифференцирующего блока, выходной сигнал блока задания, выход nepisoro ключевого элемента, выход uXj сздаматора, величины пороговых сигналов Л,, 7 V поступающие на входы соотп ветственно четвертого, первого, второго, третьего и пятого пороговых элементов. Объект 6.управления пред-ь ставляет собой гранулятор 25 с оросителем 26,
Система работает следующим обраРегулятор 4, на вход которого с сумматора 3 поступает сигнал йХ, рассогласования заданного значения давЛенин 4 с блока 1 задания, подключенного к сумиатору 3 через ключевой элемент §, и текущего значения давления Х с датчика 2 давления, осу щеетвляет регулирование давления
жидкости в питающем трубопроводе посредством регулирующего клапана с исполнительным механизмом 5.
ключевого элемента- 19 равен нулю, если выход элемента
ИЛИ 21 отличен от нуля.
ФункциональньШ преобразователь 7 преобразует входной сигнал ,,заданного значения давления в Х значение расхода продукта, соответствующее заданной величине давления при минимальной величине гидравлического, сопротивления объекта 6 управления.Делитель 8 вычисляет величину отношения Х сигналов Xj и Х,поступающих соответственно с датчика 13 расхода и функционального преобразователя 7. Сигнал . характеризует снижение производительности объекта, вызванное увеличением его гидравлического сопротивления. Сигнал Х с выхода делителя 8 через ключевой элемент 9 поступает на вход блока 10 памяти, причем сигнал Х4 проходит на выход элемента 9 при условии, что ца другой вход элемента 9 поступает сигналгЬ выхода элемента И 18, отличный от нуля. С выхода блока 10 памяти сигнал Х подается на блок 14 регистрации и входы пороговых блоков 11 и 20, на другие входа которых подаются величины пороговых.сигналов соответствено, и Блок 14 обеспечивает непрерывную регистрацию величины Х, что необходимо для анализа работы апарата. При выполнении в пороговом элементе П условия ,c выхода элемента 11 на вход-.блока 12 сигнализации подается управлянщий сигнал для осуществления сигнализации. .
Предупредительная, сигнализация ипользуется для извещения оператора о состоянии процесоа,а также дает возможность до-;момеита автоматического останова объекта выполнить ряд необходимых в этой ситуации операций по координации нагрузок стадий технологического процесса, а также подготовку .:и включение в работу резервного объекта вспомотатёльного оборудования.
При выполнении а пороговом элементе 20 условия гдеЛг Я4 с-выхода, элемента 20 подаетс;Я сигна на вхс)д элемента ИЛИ 2.1, на другой вход которого подается сигнал с выхода порогового элемента 24. При поступлении .сигнала хотя бы на один из входов элемента ИЛИ 21 с выхода его на вход :ключевого элемента 19 подается управляющий сигнал,закрывающий ключевой элемент 19,при этом сигнал , становится равным нулю. На один вход порогового элемента 24 подается сигнал с датчика 2 давления, а на другой вход - величина порогового сигнала и 5 При выполнении в пороговом элементе 24 услов Х, 5 сигнал с дыхода элемента 24 поступает на вход элемента ИЛИ 21. Это позволяет осуществлять останов объекта управления, если давление в линии питания превышает предельно допустимое значение. Блоки 15,16 и 22, а также элемен ты 18,17 и 23 предназначены для иде тификации состояния квазистатики объекта управления, при этом анализ руется модулъ величины отклонения ДХ, и модуль скорости изменения ЛХ/ Величина Х с выхода сумматора 3 подается на вход дифференцирующего блока 15, а через блок 22 выделения Модуля - на один из входов поро гового элемента 23. С выхода блока 15 сигнал Xtf скорости изменения ЛХ I подается через блок 16 вьзделени : модуля на один вход порогового элемента 17,на другой вход которого поступает величина порогового сигнала - . При выполнении в элементе 17 условия ,/Хд/гг % сигнал с выз{ода эле;мента 17 поступает на вход элемента И 18, На другой вход элемента 23 подается величина порогового сиг нала и 4 При выполнении в элементе 23 УСЛ ,/ сигнал с выхода, элемента 23 поступает на вход,элемента И 18. С выхода элемента И 18 при .наличии сигналов на каждом иа его входов подается сигнал на вход ключевого элемента 9, который от- крывается и пропускает сигнал Xjj. на вход блока 10 памяти, Повьшение производительности сис темы достигается за счет оптимизации числа остановок, которая осуществляется выбором величины пороге вого сигнала,-А , при которой неличина критерия качества (I) становится минимальной. На фиг.2 приведена циклограмма работы объекта управления. (N-1 }ин о1 1 ; (Ы-с ,(i) пг . V , i+S где i 0,1,2..., N-1; с eft;, t.J; X ,- величина расхода продукта ПЧЛ , при X, 2 О - средняя длительность проведения профилактических работ; t,- tf(Xj, 7,j); ( - некоторая функция. Для описания работы функционального преобразователя 7 рассмотрим в качестве объекта 6 управления предлагаемой системы гранулятор с оросителем статического типа, принадлежащий классу аппаратов с переменным гидравлическим сопротивлением. Как известно, уравнение расхода несжимаемой жидкости (в объемных единицах), вытекающей из сосуда через отверстие в единицу времени имеет вид (фиг.ЗУ G(t) S.c6-j--- P(t), где S - совокупная площадь отверстий оросителя} bi - коэффициент расхода; |5 --плотность жидкости; P(t) - избыточное давление жидкости в оросителе, В процессе грануляции с течением ремени под;воздействием ряда фактоов совокупная площадь отверстий оросителя, как правило, уменьшается.Осовными причинами этого являются вердые включения в гранулируемом еществе или кристаллизация последего в отверстиях оросителя, Таким бразом, совокупная площадь отвертий является функцией времени и ормула (2) принимает следующий вид G(t)-S(t). P(t).S(t)4P(t И - постоянная для данного де продукта, данного оросителя и данного диапазона измерения P(t} величина.
Если в формуле (3) S(t) S, т.е. гранулятор имеет минимальное при данном P(t) гидравлическое сопротивление, то формулу (3) можно записать
S av-lP(t).
,(t)
/
(4) Величина S
вычисляется
по
motx
формуле
N-.d ... тйг 5 5)
где N и d - соответственно число и диаметр отверстий оросителя.
Величина коэффициента чс расхода определяется в виде оценки ос аналитически или экспериментально. Окончательно формула (2) приобретает вид
А Г2 (t)
(6
max
max
А
где оценка максимального значения расхода при данной величиHe.P(t;. ,
Для обозначений, принятых на фиг.1-3 формула (6) имеет вид
x,.i4. 4f; s(,-i|7.(7)
Используя формулу (6), функциональный преобразователь 7 можно реализовать различными способами,например, на основе использования стандартных унифицированных функциональных устройств системы СТАРТ. Выходной сигнал Х функционального блока 7 представляет собой максимально возможное для данного устройства значение расхода при заданном давлении ,
Если S(t)S,TO действительный расход продукта, измеряемый датчиком 13 расхода, будет максимальным при этом же значении давления среды Xj в оросителе.
В этом случае относительная величина Х будет иметь максимальное значение
X -ii§Jnsuf - 1
(8)
Y re; Т
Если S(t)S
то .
При данном значении параметра Х величина S(t) может изменяться в диапазоне Co,S, а Х4, следовательно, в диапазоне Го,.
5
м::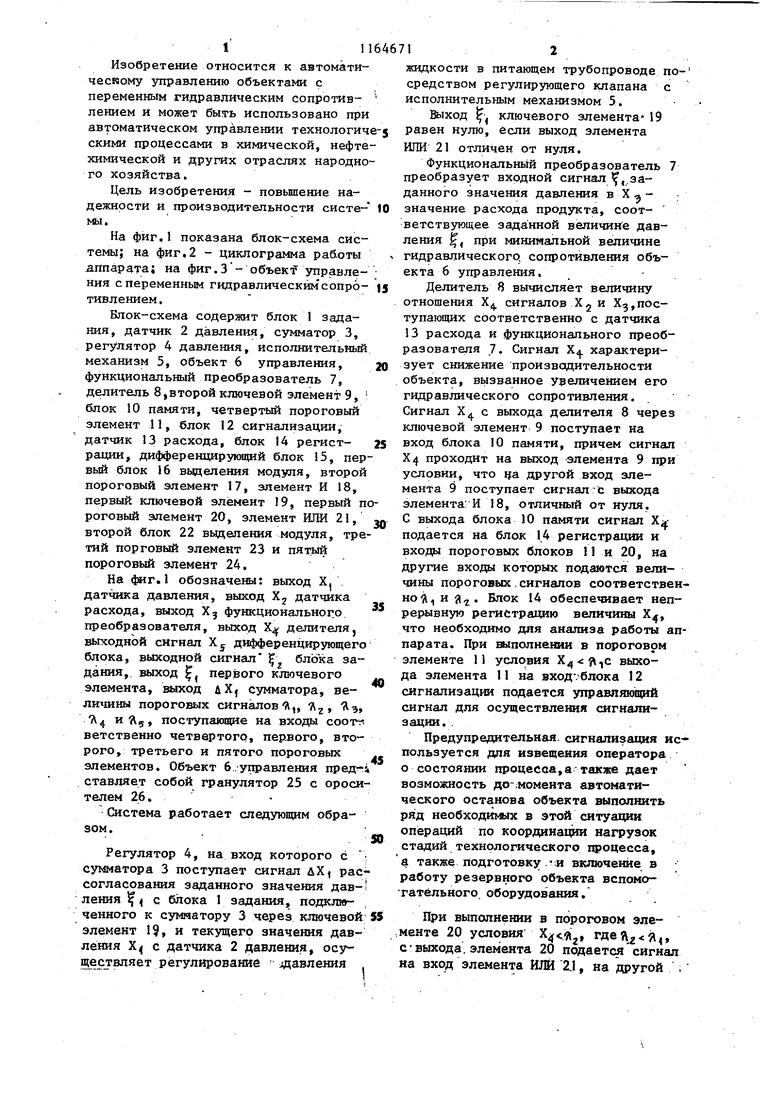
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Система автоматического управления | 1986 |
|
SU1409971A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2016 |
|
RU2616219C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УЗЛОМ РАЗГОНКИ ОТХОДОВ БРАГОРЕКТИФИКАЦИОННОЙ УСТАНОВКИ | 2014 |
|
RU2563277C1 |
СИСТЕМА УПРАВЛЕНИЯ НАГРУЗКОЙ В ОБЪЕКТАХ С ПЕРЕМЕННЫМ ГВДРАВ- ЛИЧЕСКИМ СОПРОТИВЛЕНИЕМ, содержащая установленные на линин питания объекта управления исполнительный механизм и датчик давления, выход которого соединен с первым входом сумматора, связанного выходом с входом регулятора давления, выход которого подключен к исполнительному механизму, а также блок задания, отличающаяся тему что,с целью повышения надежности и произ- ; водительности системы, она содеряит последовательно соеднненгеле первый ключевой элемент, функциональный преобразователь, делитель, в торой ключевой элемент, блок памяти, пер- i вый пороговый элемент и элемент ИЛИ, последовательно соединенные дифференцирующий блок, первый блок выделения модуля, второй пороговый элемент и элемент И, последовательно соединенные второй блок вьщеления модуля и третий пороговый элемент,последовательно соединенные четвертый -пороговый элемент и блок сигнализации, а также пятый пороговый элемент, блок регистрации и датчик расхода, установленный на линии питания объекта управления и связанный выходом с вторым входом делителя, причем вход дифференцирующего блока подключен к входу второго блока выделения модуля и выходу сумматора,со(Л единенного вторым входом с выходом первого ключевого элемента, вход которого связан с выходом блока задания, выход датчика давления соединен с входом пятого порогового элемента, выход которого подключен к второму входу элемента ИЛИ, связанноО5 го выходом с управляющим входом перli k вого ключевого элемента, выход третьО) его порогового элемента соединен с «Ч вторым входом элемента И, подключенного выходом к управляющему входу второго ключевого элемента, вход четвертого порогового элемента связан с выходом блока памяти и входом блока регистрации.
К
Л
Фи8.5
| Мордкович В.И | |||
| Системы питания технологических линий химических производств | |||
| M;i Химия, 1976,с.65, 66,75 | |||
| Казаков А.В., Кулаков В.М., Мелюшев Ю.К | |||
| Основы автоматики и автоматизации химических производств | |||
| М.: Машиностроение, 1970, с.320. |
