1
Изобретение относится к судостроению, в частности к рулевым двигателям судна.
Известна судовая рулевая машина, содержащая линейный электродвигатель, включающий корпус и подвижную часть, кинематически связанную с баллером и гидравлическим тормозом, камеры которого гидравлически сообщены, между собой через клапан кольцевания, имеющий электромагнит и систему управления рулевой мащиной 1.
Однако недостатками известного рулевого устройства являются наличие значительного числа кинематических связей, а также использование нереверсивных линейных двигателей, что приводит к необходимости установки, по крайней мере, двух двигателей, каждый из которых работает в течении только одной половины цикла перекладки руля.
Указанные недостатки увеличивают массогабаритную характеристику устройства, усложняют схему управления и снижают надежность работы рулевого устройства.
Цель изобретения - улучшение массогабаритных характеристик и повышение надежности рулевой машины.
Поставленная цель достигается тем, что в рулевой машине судна корпус линейного электродвигателя выполнен трубчатым и вмещающим упомянутый гидравлический тормоз, при этом цилиндр гидравлического
5 тормоза размещен внутри подвижной части лкнейного электродвигателя, а поршень гидравлического тормоза выполнен с двусторонним штоком,закрепленным неподвижно и имеющим каналы, через которые по,Q лость цилиндра сообщена с клапаном кольцевания, при этом система управления снабжена бесконтактным реверсивным пускателем, электрически связанным с линейным электродвигателем и с электромагнитом клапана кольцевания.
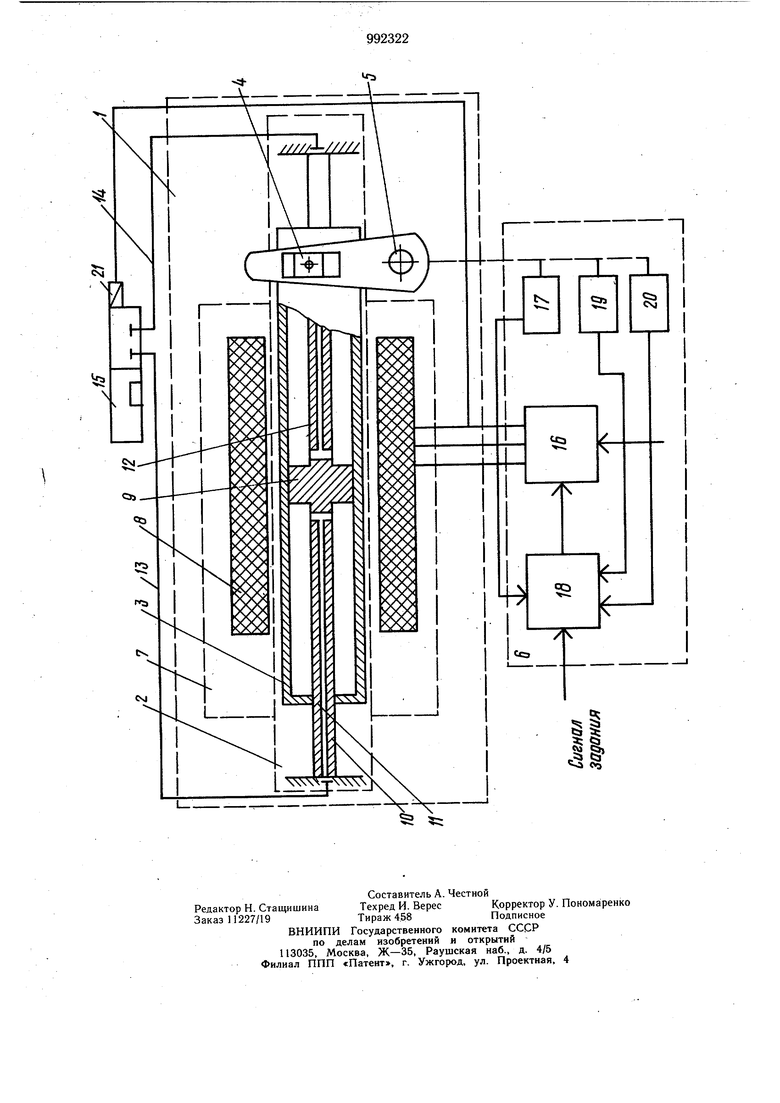
15 На чертеже представлена принципиальная схема рулевой машины.
Рулевая машина содержит корпус 1 с гидротормозом 2, выполненным в виде гидроцилиндра двустороннего действия, ци2Q линдр 3 которого соединен через механическую передачу 4 с баллером 5 руля, а также систему 6 управления.
Корпус 1 содержит реверсивный трубчатый линейный электродвигатель 7, индукл тор 8 которого охватывает цилиндр 3 гидротормоза 2. В цилиндре 3 расположен поршень 9, закрепленный неподвижно двусторонним штоком 10, в котором выполнены каналы 11 и 12, гидравлически сообщенные через магистрали 13 и 14 с клапаном 15 кольцевания.
Система 6 управления рулевой машины содержит бесконтактный реверсивный пускатель 16, датчик 17 положения руля, блок 18 сравнения и усиления, датчики 19 и 20 предельных положений руля.
Клапан кольцевания 15 имеет электромагнит 21, питание на который подается с выхода пускателя 16.
Рулевое устройство работает следуюшим образом.
При отсутствии необходимости перекладки руля напряжение на .индуктор 8 линейного электродвигателя 7 и электромагнит 21 клапана 15 кольцевания не подается и руль удерживается в среднем положении (в диаметральной плоскости судна) гидротормозом.
При необходимости перекладки руля, например вправо, с бесконтактного реверсивного пускателя 16 системы 6 управления подается напряжение на индуктор 8 электродвигателя и на электромагнит 21 клапана 15, который смещает золотник в крайнее правое положение и при этом сообщает полости цилиндра 3 гидротормоза 2 растормаживание привода. Напряжение на индуктор 8 поступает в такой последовательности фаз, которая обеспечивает движение цилиндра 3 влево, при этом поворачивается баллер 5 руля и руль перекладывается на правый бок. Перекладка происходит до тех пор пока сигнал с датчика 17 не скомпенсирует полностью сигнал задания в блоке 18 сравнения и усиления сигнала ошибки. При достижении этого условия сигнал с пускателя 16 снимается, линейный двигатель 7 обесточивается. Снятие напряжения с электромагнита 21 приводит к переключению клапана 15, который перекрывает гидравлические магистрали 13 и 14 и руль становится на гидротормоз.
При перекладке руля на другой борт работа происходит аналогично, кроме одного: напряжение на индуктор 8 электродвигателя 7 подается при обратном чередовании фаз напряжения.
Технико-экономическая эффективность достигается сокращением числа кинематических связей и исключением ползунов, использованием цилиндра гидротормоза в качестве подвижной части двигателя, т.е. совмещением двух механизмов, увеличением активной площади электродвигателя за счет выбора трубчатой конструкции, а также использованием реверсивного бесконтактного пускателя и реверсивного двигателя.
Формула изобретения
Судовая рулевая машина, содержащая линейный электродвигатель, включающий корпус и подвижную часть, кинематически связанную с баллером и гидравлическим тормозом, камеры которого гидравлически сообщены между собой через клапан кольцевания, имеющий электромагнит, и систему управления рулевой машиной, отличаю5 щаяся тем, что, с целью улучшения массогабаритных характеристик и повышения надежности рулевой машины, корпус линейного электродвигателя выполнен трубчатым и вмещающим упомянутый гидравлический тормоз, при этом цилиндр гидравлического
тормоза размещен подвижной части линейного электродвигателя, а поршень гидравлического тормоза выполнен с двусторонним штоком, закрепленным неподвижно и имеющим каналы, через которые полость цилиндра сообщена с клапаном кольцевания, при этом система управления снабжена бесконтактным реверсивным пускателем, электрически связанным с линейным электродвигателем и электромагнитом клапана кольцевания.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2969786/27-11, 19.02.81 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевое устройство судна | 1982 |
|
SU1041419A1 |
| Рулевое устройство судна | 1980 |
|
SU927642A1 |
| Гидравлическая рулевая машина | 1978 |
|
SU738944A1 |
| Электрогидравлическая судовая рулевая машина | 1980 |
|
SU937269A1 |
| Гидравлическая рулевая машина | 1978 |
|
SU713770A1 |
| Гидравлический привод руля судна | 1980 |
|
SU931590A1 |
| Судовая рулевая машина с электроприводом | 1980 |
|
SU933546A1 |
| Гидравлический привод судовой рулевой машины | 1980 |
|
SU937268A1 |
| Электрогидравлическая рулевая машина | 1981 |
|
SU994340A1 |
| Электрогидравлическая рулевая машина | 1986 |
|
SU1449459A1 |