(54) СУДОВАЯ РУЛЕВАЯ МАШИНА С ЭЛЕКТРОПРИВОДОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевое устройство судна | 1980 |
|
SU927642A1 |
| Гидравлическая рулевая машина | 1977 |
|
SU716907A1 |
| Гидравлический привод судовой рулевой машины | 1980 |
|
SU910493A1 |
| Электрогидравлическая рулевая машина | 1983 |
|
SU1115967A1 |
| Гидравлический привод судовой рулевой машины | 1980 |
|
SU937268A1 |
| Гидравлический привод судовой рулевой машины | 1974 |
|
SU540769A1 |
| Электрогидравлическая рулевая машина | 1983 |
|
SU1119929A1 |
| Электрогидравлическая рулевая машина | 1983 |
|
SU1123939A1 |
| Гидравлический привод судовой рулевой машины | 1983 |
|
SU1109337A1 |
| Гидравлическая рулевая машина | 1977 |
|
SU763185A1 |
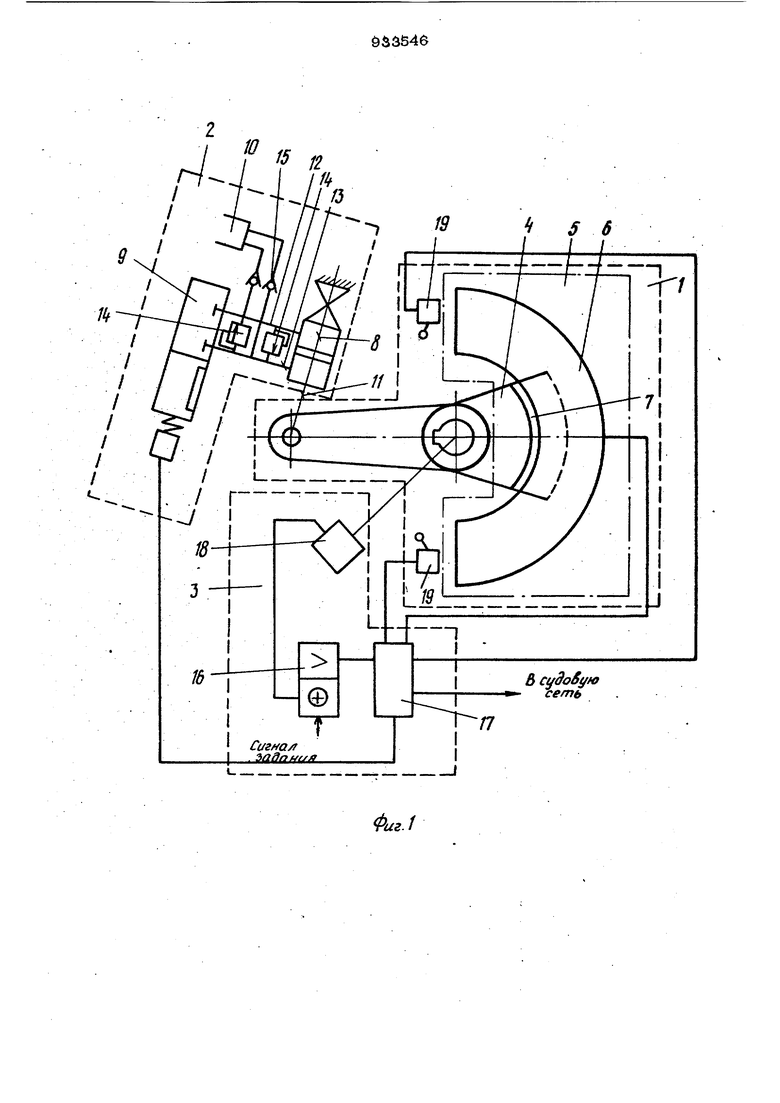
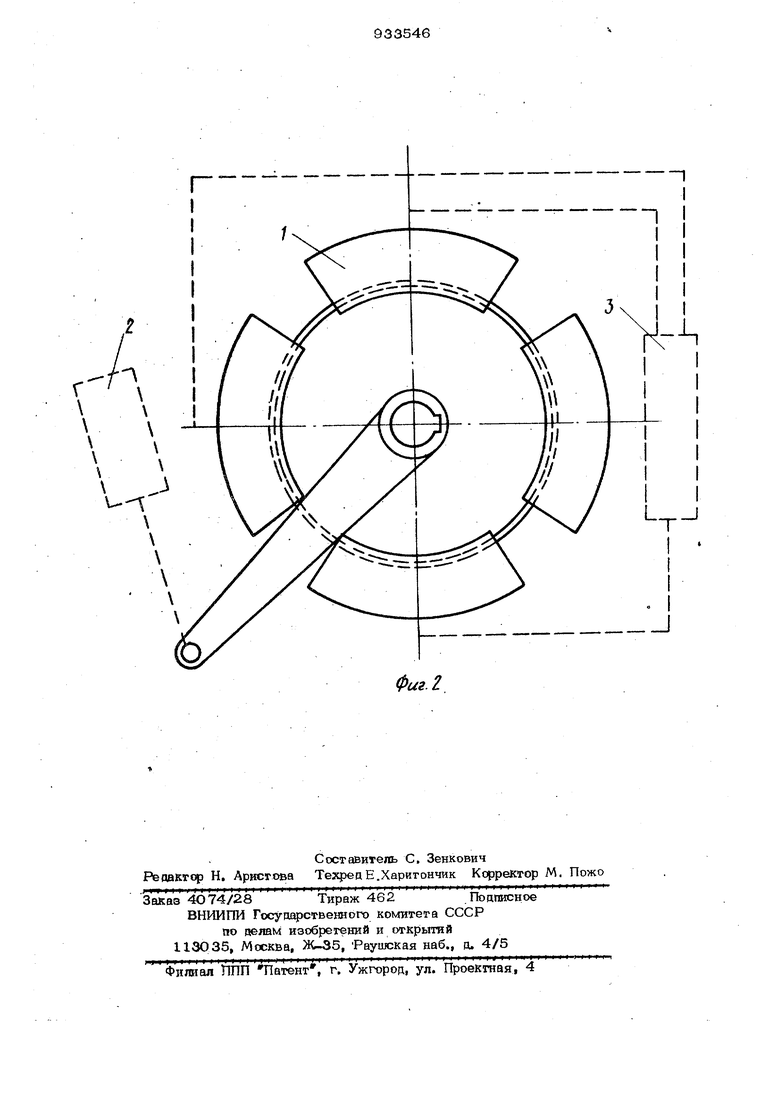
Изобретение относится к области суаостроения, в частности к судовым рулевым машинам с электродвигателжЕМи. Известна судовая рулевая машина, содержащая фундамент, на котором смонтированы силовой исполнительный механизм кинематически связанный с балпэром руля посредством сектора, тормозное устройство и систему управления, кочрорые связаны с силовым исполнитетьным механиамo,lЦ. Недостатками данного технического ре шения являются низкий КПД и большие массо-габарттные характеристики судовой рулевой машины. Цель изобретения - повышение эффективности к улучшение массо-габаритньк характеристик судовой рулевой машины. Цель достигается тем, что силовой ио полнительный механизм Выполнен в виде реверсивного электродвигателя, имеюшего дугообразный статор, индуктор которого закреплен на фундаменте, а ротор - на секторе. На фиг. 1 представлена принципиальная схема рулевой машины с одним дугостаторным электродвигателем: на фиг. 2то же с несколькими электродвигателями. Судовая рулевая машина содержит силовой наполнительный механизм 1, то1. мозное устройство 2, систему 3 управления. Механизм I состоит из сектора 4, р&. BepcimHoro дугостаторного элжтроовигателя 5, индуктор 6 котсрого закреп юн на фундаменте (на фигурах не обоздачвн), а ротс 7 - на секторе 4. Устройство 2 cocTtMT из гиародалинцра 8 двустороннего действия, электромаг нигного клапана 9 и дополнительного бака Ю. 1 11фоцилиндр 8 и его шток 11 шарнирно соединены соответственно с фун1Ш ментом и сектором 4. Гидрсцилиндр 8 соединен с клапаном 9 гидравлическими линиями 12 и 13, на-которых установлены предохранительные клапаны 14 и с которыми через невозвратные клапаны 15 со&3единен бак 1р, компенсирутоший температурные изменения объема рабочей жипКоо ти и иополняюший незнйчительные утечки жиORости из устройства 2, Система 3 управления содержит блок 16уттравпения, регулируемый источник 17питания, датчик 18 положения руяя я датчики 19 препельных углов перекладки, Супсйая рулевая машина работает следующим образом. На фиг. I рулевая машина показана пр среднем положения руля (в диаметральной плоскости суяна), при этом электродвигатель 5 и клапан 9 выключены. Полости гидрошлиндра 8 разобщены и устройство 2 удерживает руль с этом положении. При подаче сигнала задания угла перекладки руля блоком 16 системы 3 уп равления, например, на первый борт (против часовой стрелки) с источника 17 питания на индуктср 6 электродвигателя 5 подается напрягакение, соответствующее требуемому направлению вращения ротора 7, одновременно с источника питания подается напряжение и на клапан 9, который, смещаясь; в крайнее положение, соединяет через линии 12 м и 13 полосf ти гидроцилиндра 8 тормозногоустройства 2. Расторможенный ротор 7 поворачивает против часовой стрелки сектор 4, а вместе с ним и баллер руяя. Руль перекладывается на правый борт. Перекладка руля происходит до тех пор, пока сигнал дат чиКа 18 положения руля полностью не скомпенсирует сигнал задания блока 16 системы 3 управления. После выполнения этого условия источник 17 питания снижает напряжение до нуля на индукторе 6 электродвигателя 5 и клапане 9 тормоэного усиройства 2. Происходит фиксирование (затормаживание) руля на заданном угле перекладки. в Работа рулевой маипшы при задании угла перекладки на левый борт аналогична работе при задании угла перекладки на правый борт . Датчики 19 предельных УГЛОВ перекладки ограничивают угол перекладки руля путем воздействия на источник 17 питания. Судсьая нулевая машина (фиг. 2),работйет при аналогичном взаимодействии элементе. Таким образом, данное техническое решение повышает КПД рулевой машины на 15+20% и снижает массо-габаритные характеристики на 2О+ЗО% по сравнению с прототипом ввиду исключения редукцишной передачи. Формула изобретения Судовая рулэвая машина с электроприводом, содержащая смонтированный на фундаменте силовой исполнительный механизм, Кинематически связанный с бал;крс г руля посредством сектора, тормоэное устройство и систему управления, которые связаны с силовым исполнительным механизмом, отличающаяс я тем, что, с целью повышения эффекшвнсжти и улучшения массо-габаритных характеристик судшой рулевой машины, силовой исподаительный механизм выполнен в виде реверсивного электродвигателя, имеющего дугообразный статор, индуктор которого закреплен на фундаменте, а ротор - на секторе. Источники инффмации, принятые во внимание при экспертизе 1. Камнев Т, Ф. и др. Подьемно-транспфтные машины и палубнью механизмы. Л. Судостроение, 1976, с. 278,; рис. 141а (прототип).
Фиг.1
фиг. г
