ff(Л
с:
ел
ьэ
q СО сл
Btynica 18 взаимодействует с внутренней резьбсзок поверхностью 8 кор- пз са 12 и электромагнитньми обмотка- Mi: 19, охватьюающими последний.Проводимость дросселирующего устройству 11 определяется взаимным положением втулки 18 и сердечника 15, В начальный момент втулка 18 своим тор- цфм перекрьшает канал 13. Для разго- н4 привода на обмотки 19 подается напряжение с нарастающей по требуе
мому закону частотой с устройства управления. Под действием возникающего крутящего момента втулка 18 начинает вращаться и отходит от канала 13„ По мере продвижения втулки длина зазора между втулкой 8 и сер- -дечником 15 уменьшается и осуществляется разгон привода Изменяя проводимость устройства I1, можно изменять скорость привода от нуля до максимального значения 1 ил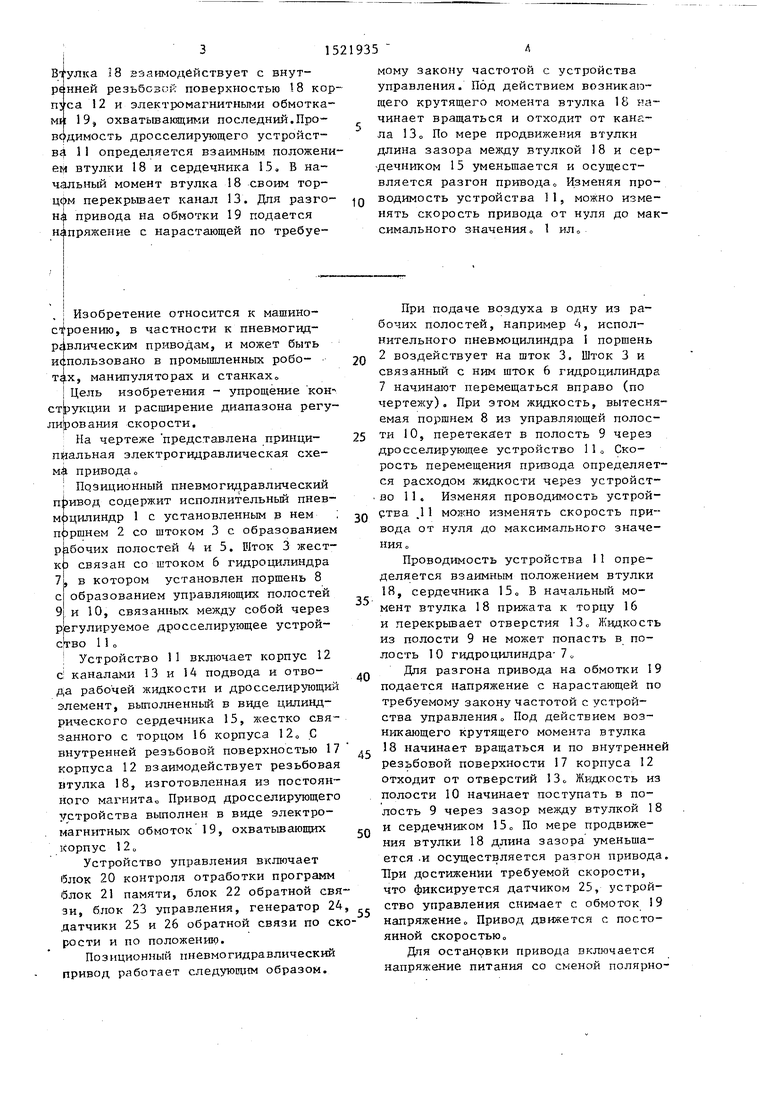

| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЗИЦИОННЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2074329C1 |
| ПОЗИЦИОННЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2079732C1 |
| Позиционный пневмогидравлический привод | 1981 |
|
SU994816A1 |
| Пневмогидравлический следящий привод | 1988 |
|
SU1562542A1 |
| Пневмогидравлический следящийпРиВОд | 1978 |
|
SU802657A1 |
| ГИДРОДОМКРАТ ПЕРЕДВИЖЕНИЯ СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2008 |
|
RU2392439C1 |
| Пневмогидравлический следящий привод | 1987 |
|
SU1479713A1 |
| Позиционный пневматический привод | 1988 |
|
SU1508015A1 |
| ПОЗИЦИОННЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2065092C1 |
| Пневмогидравлический гайковерт | 1990 |
|
SU1717290A1 |
Изобретение может быть использовано в промышленных роботах, манипуляторах и станках. Цель изобретения - упрощение конструкции и расширение диапазона регулирования скорости. Позиционный пневмогидравлический привод содержит исполнительный пневмоцилиндр 1, шток 3 которого жестко связан со штоком 6 гидроцилиндра 7. Полости 9, 10 гидроцилиндра 7 связаны между собой через регулируемое дросселирующее устройство 11, которое включает корпус 12 с каналами 13, 14, цилиндрический сердечник 15 и резьбовую втулку 18, выполненную из постоянного магнита. Втулка 18 взаимодействует с внутренней резьбовой поверхностью 17 корпуса 12 и электромагнитными обмотками 19, охватывающими последний. Проводимость дросселирующего устройства 11 определяется взаимным положением втулки 18 и сердечника 15. В начальный момент втулка 18 своим торцом перекрывает канал 13. Для разгона привода на обмотки 19 подается напряжение с нарастающей по требуемому закону частотой с устройства управления. Под действием возникающего крутящего момента втулка 18 начинает вращаться и отходит от канала 13. По мере продвижения втулки длина зазора между втулкой 18 и сердечником 15 уменьшается и осуществляется разгон привода. Изменяя проводимость устройства 11, можно изменять скорость привода от нуля до максимального значения. 1 ил.
. I Изобретение относится к машино- с роению, в частности к пневмогид- р4влическнм приводам, и может быть использовано в промышленных робо- , манипуляторах и станках,
i Цель изобретения - упрощение кон- стЬукЦии и расширение диапазона регулирования скорости.
На чертеже представлена принципиальная электрогидравлическая схе- мА привода
; Пдзиционный пневмогидравлический п|)ивод содержит исполнительньй пнев- м|)цилиндр 1 с установленным э нем п|эршнем 2 со штоком 3 с образованием рабочих полостей 4 и 5. DiTOK 3 жест- кЬ связан со штоком 6 гидроцилиндра
в котором установлен поршень 8 образованием управляющих полостей 9| и 10, связанных между собой через регулируемое дросселирующее устрой- 11 о
: Устройство 11 включает корпус 12 d каналами 13 и 14 подвода и отвода рабочей жидкости и дросселирующий элемент, выполненный в виде цилиндрического сердечника 15, жестко связанного с торцом 16 корпуса 12 С внутренней резьбовой поверхностью 17 корпуса 12 взаимодействует резьбовая ктулка 18, изготовленная из постоянного магнита. Привод дросселирующего устройства выполнен в виде электромагнитных обмоток 19, охватьшающих icopnyc 12„
Устройство управления включает блок 20 контроля отработки программ блок 21 памяти, блок 22 обратной связи, блок 23 управления, генератор 24 датчики 25 и 26 обратной связи по скрости и по положению.
Позиционный пневмогидравлический привод работает следующим образом.
0
5
0
5
40
45
50
При подаче воздуха в одну из рабочих полостей, например 4, исполнительного пневмоцилиндра 1 поршень 2 воздействует на шток 3. Шток 3 и связанный с ним шток 6 гидроцилиндра 7 начинают перемещаться вправо (по чертежу). При этом жидкость, вытесняемая поршнем 8 из управляющей полости 10, перетекает в полость 9 через дросселирующее устройство 11 Скорость перемещения привода определяется расходом жидкости через устройст- .во 11, Изменяя проводимость устрой- ртва J1 можно изменять скорость привода от нуля до максимального значения
Проводимость устройства I1 определяется взаимным положением втулки 18, сердечника 15 В начальный момент втулка 18 прижата к торцу 16 и перекрьшает отверстия 13„ Жидкость из полости 9 не может попасть в полость 10 гидроцилиндра 7„
Для разгона привода на обмотки 19 подается напряжение с нарастающей по требуемому закону частотой с устройства управления Под действием возникающего крутящего момента втулка 18 начинает вращаться и по внутренней резьбовой поверхности 17 корпуса 12 отходит от отверстий 13 Жидкость из полости 10 Начинает поступать в полость 9 через зазор между втулкой 18 и сердечником 15 По мере продвижения втулки 18 длина зазора уменьшается .и осуществляется разгон привода, При достижении требуемой скорости, что фиксируется датчиком 25, устройство управления снимает с обмоток 9 напряжение Привод движется с постоянной скоростью
Для остан9вки привода включается напряжение питания со сменой полярно515
сти и втулка 18, вращаясь в противоположном направлении, движется к исходному положению, перекрывая отверстия 13 и останавливая привод.
Устройство управления работает следующим образом
В генераторе 24 вырабатьшается напряжение с требуемьм законом изменения частоты. Работа генератора 24 контролируется блоком 23 управления и блоком 20 контроля отработки программ о Перемещения привода контролируются блоком 22 обратной связи по сигналам с датчиков 25 и 26. По сигналу с блока 20 контроля блок 23 управления записывает следзтощий кадр программы из блока 21 памяти в блок 23 управления. Процесс повторяется до окончания отработки всей программы Реверс привода обеспечивается подачей воздуха в рабочую полость 5 исполнительного пневмоцилиндра I.
Предлагаемый привод не потребляет энергии в режиме остановки, обеспечивает торможение при выключении питания, что исключает перемещение исполнительных органов под действи
ем их веса или случайной внешней нагрузки.
Формула изобретения
Позиционный пнёвмогвдравлический привод, содержащий исполнительный пневмоцилиндр, шток которого жестко
связан со штоком гидроцилиндра, полости которого связаны между собой через регулируемое дроссельное устройство, включающее корпус с каналами подвода и отвода и дросселирующим элементом, при этом привод дросселирующего устройства вьтолнен в виде электромагнитных обмоток, охва- тьшающих корпус, отличающийся тем, что, с целью упрощения конструкции и расширения диапазона регулирования скорости, корпус выполнен с резьбой, дросселирующий элемент - в виде цилиндрического сердечника, жестко связанного с торцом
корпуса и взаимодействующего с размещенной в корпусе резьбовой втулкой, установленной с возможностью взаимодействия с резьбой корпуса.
| Позиционный пневмогидравлический привод | 1987 |
|
SU1455063A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
