СО Oi
Изобретение относится к механизации и автоматизации технологических процессов Б машиностроении и приборостроении и может быть использовано, в частности,в приводах сборочных автоматов и манипуляторов.
Цель изобретения - упрощение конструкции и повышение надежности.
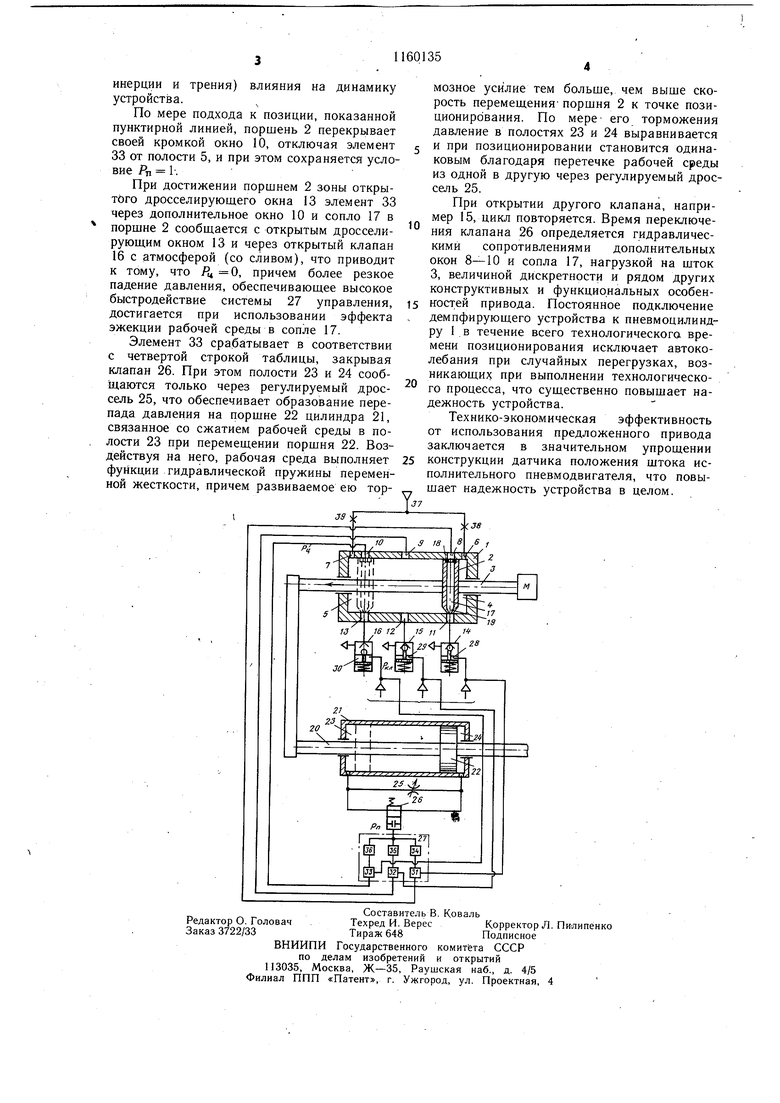
На чертеже представлена принципиальная схема предложенного позиционного привода.
Позиционный привод содержит исполнительный пневмодвигатель, выполненный в виде многодырочного пневмоцилиндра 1 с размешенным в нем поршнем 2 с двухсторонним штоком 3 с образованием рабочих полостей 4 и 5. В пневмоцилиндре 1 выполнены впускные окна 6 и 7, дополнительные окна 8-10, дросселирующие окна 11 -13, выполненные с возможностью сообщения через клапаны 14-16 с атмосферой (со сливом). В поршне 2 установлено сопло 17, вход 18 которого расположен со стороны дополнительных окон 8-10, а выход 19 со стороны дросселирующих окон 11 -13. С двухсторонним штоком 3 жестко связан двухсторонний шток 20 демпфирующего устройства, выполненного в виде цилиндра 21 с установленным в нем поршнем 22 с образованием полостей 23 и 24, связанных между собой через регулируемый дроссель 25 и клапан 26, который снабжен системой 27 управления, соединенной с входами 28- 30 клапанов 14-16, а также с дополнительными окнами 8-10. Система 27 управлеНИН состоит из логических элементов НЕТ 31-33 и обратных клапанов 34-36. Кроме того, привод содержит магистраль 37 питания с установленными в ней дросселями 38 и 39.
Позиционный привод работает следующим образом.
При переключении управляющего сигнала с входа 28 клапана 14 (исходная позиция по чертежу), например, на вход 30 клапана 16 последний открывается и дросселирующее окно 13 сообщается с атмосферой. Под действием перепада давления в рабочих полостях 4 и 5 поршень 2 начинает ускоренно перемещаться в сторону открытого окна 13 совместно с поршнем 22 цилиндра 21. Одновременно с этим срабатывает система 27 управления, на логический элемент НЕТ 33 которой постоянно подается сигнал с входа 30 клапана 16 и сигнал от соответствующего дополнительного окна 10. Логический элемент 33 реализует операцию НЕТ по таблице состояний, где, Рц - дискретное значение величины давления на выходе дополнительного окна 10; PKJL - дискретное значение величины давления управления на входе 30 клапана 16; РЯ - дискретное значение величины давления переключения клапана 26, причем при /5i 0 клапан 26 открыт и сообщает полости 23 и 24 через проходное сечение большой площади совместно с регулируемым дросселем 25, а при Рц 1 клапан 26 закрыт и полости 23 и 24 сообщаются только через регулируемый дроссель 25.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный агрегатный станок | 1989 |
|
SU1779544A1 |
| АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ | 2013 |
|
RU2574649C2 |
| Позиционный пневматический привод | 2018 |
|
RU2689662C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ МОДУЛЬ ДЛЯ ПРИВОДА ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2249662C1 |
| ЭЛЕКТРОПНЕВМОПРИВОД ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2261977C1 |
| Струйная позиционная пневматическая система привода длинноходовых установочных координатных перемещений | 2023 |
|
RU2802568C1 |
| Пневматический следящий привод | 1981 |
|
SU966329A1 |
| Пневмогидравлический следящий привод | 1989 |
|
SU1682640A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ И ВЫПОЛНЕННАЯ С ПОДОБНЫМ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ КЛАПАННАЯ СИСТЕМА | 2009 |
|
RU2548137C1 |
| Позиционный пневмогидравлический привод | 1981 |
|
SU994816A1 |
1. ПОЗИЦИОННЫЙ ПРИВОД, содержащий исполнительный пневмодвигатель, шток которого жестко связан с демпфирующим устройством, выполненным в виде цилиндра, полости которого связаны между собой через регулируемый дроссель и клапан с системой управления, и датчик положения щтока исполнительного пневмодвигателя, выполненный в виде сопла, подключенного к системе управления клапана, отличающийся тем, что, о целью упрощения конструкции и повышения надежности, исполнительный пневмодвигатель выполнен в виде многодырочного пневмоцилиндра, сопло датчика положения щтока расположено в поршне пневмоцилиндра с возможностью сообщения с- дросселирующими окнами многодырочного пневмоцилиндра. 2. Привод по п. 1, отличающийся тем, что сопло датчика положения штока связано с системой управления клапана через дополнительные окна, выполненные в пневi моцилиндре диаметрально противоположно дросселирующим окнам. (О
Очевидно 1 на протяжении всего рабочего хода за исключением периода нахождения поршня 2 в зоне открытого окна 13. Это связано с наличием подпора рабочей среды в полости 5, который вызван движением поршня 2.
Первая строка таблицы соответствует состоянию привода при отключении его от магистрали 37 питания. В момент страгивания с исходной по чертежу позиции и при прохождении поршнем 2 позиций, на которых клапаны, например 16, закрыты, логический элемент 33 работает в соответствии с второй строкой таблицы, т.е. РП I, i, 0.
В процессе движения поршня 2 к последующей позиции элемент 33 работает в соответствии с третьей строкой таблицы, так как / 1 и PBJ 1- В обоих случаях на выходе системы 27 управления формируется сигнал /п 0, при котором клапан 26 открыт.
Таким образом, при рабочем ходе поршня 2 полости 23 и 24 цилиндра 21 сообщаются через регулируемый дроссель 25 и открытый клапан 26, не оказывающий в этом случае сопротивления перетоку рабо.чей среды, т.е. цилиндр 21 отключен и практически не оказывает (за исключением сил
| Шаговый позиционер | 1979 |
|
SU821767A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Демпфируемый позиционный привод | 1979 |
|
SU853203A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
