(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительное устройство манипулятора | 1986 |
|
SU1414620A1 |
| Манипулятор | 1980 |
|
SU872248A2 |
| Манипулятор | 1979 |
|
SU770780A1 |
| Манипулятор | 1977 |
|
SU659376A1 |
| Исполнительное устройство манипулятора | 1986 |
|
SU1366384A1 |
| ВЕТРОДВИГАТЕЛЬ | 1994 |
|
RU2095620C1 |
| Роторное передающее устройство | 1991 |
|
SU1821331A1 |
| ПОДЪЕМНЫЙ КРАН СО СКЛАДЫВАЮЩЕЙСЯ СТРЕЛОЙ | 2014 |
|
RU2566576C1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2521469C1 |
| УСТРОЙСТВО ДЛЯ СОРТИРОВКИ МУСОРА | 2004 |
|
RU2306985C2 |
1
Изобретение относится к манипулятр рам цля механизации технологических процессов, сочержащих подъемно-транспортные и аругие операции.
По основному авт. св. № 77О78О известен манипулятор, сооержаший многозвенный исполнительный орган, звенья которого шарнирно сочленены и кинематически связаны межау собой и с основанием. Каждое последующее звено смонти- д робано на предыдущем с возможностью полного в шарнире сочленения. Каждая пара звеньев снабжена дополни- тельным звеном, шарнирно установленным на этих звеньях и связанным с приводом. ,j Оси шарниров дополнительного звена расположены взаимно перпендикулярно l J .
Такой манипулятор обеспечивает только три поступательные степени подвижное ти и не имеет вращательные степени 20 подвижности.
Недостатком его является отсутствие вращательных пар, что снюкает его эксплуатационные возможности.
Цель изобретения - расширение эксплУ атанионнык возможностей.
Эта цель достигается тчэм, что манипулятор снабжен эксцентриками, кинематически связанными с приводом, а доплпнительные звенья содержат каждый два блока плунжеров, расположенных перпендикулярно друг к другу, каждый из которых содержит аналогичные группы плунжеров, причем каждая группа в свою очерець содержит по меньшей мере три расположенных по окружности плунжера, при этом плунжеры каждой группы расположены с возможностью взаимодействия с эксцентриком, а блоки кажаого дополнительного звена кинематически связаны между собой, при этом внутри каждого блока плунжеры аналогичных групп гидрав лически связаны межпу собой.
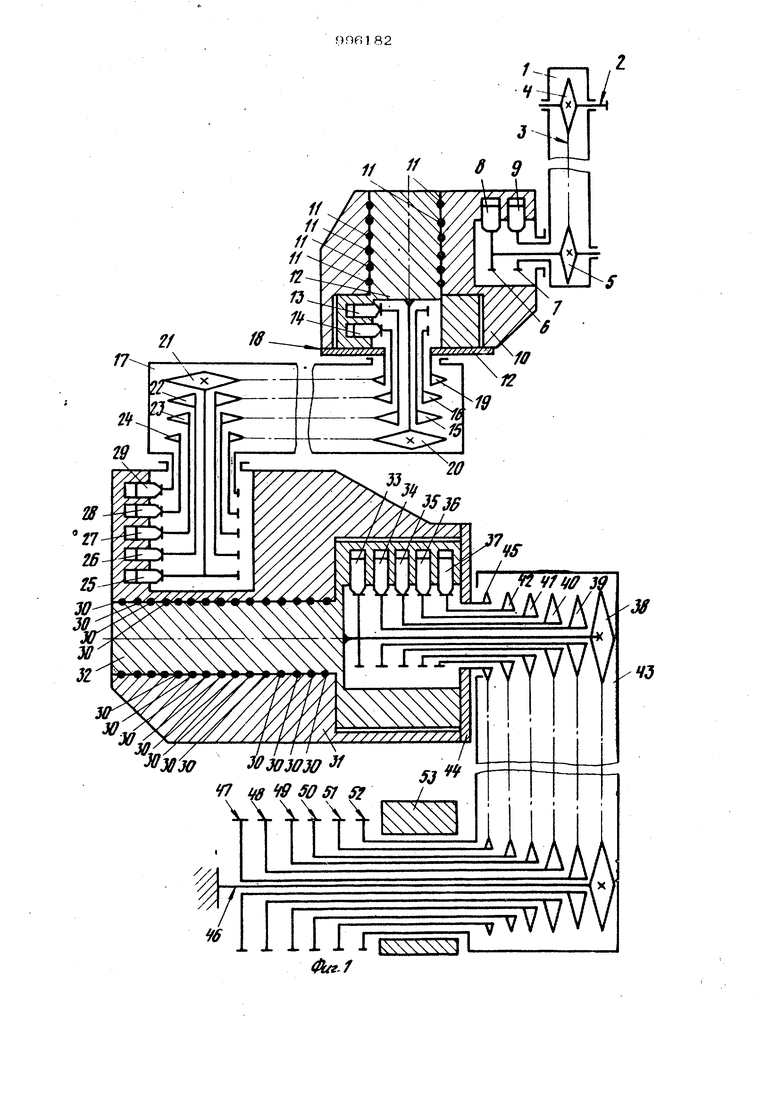
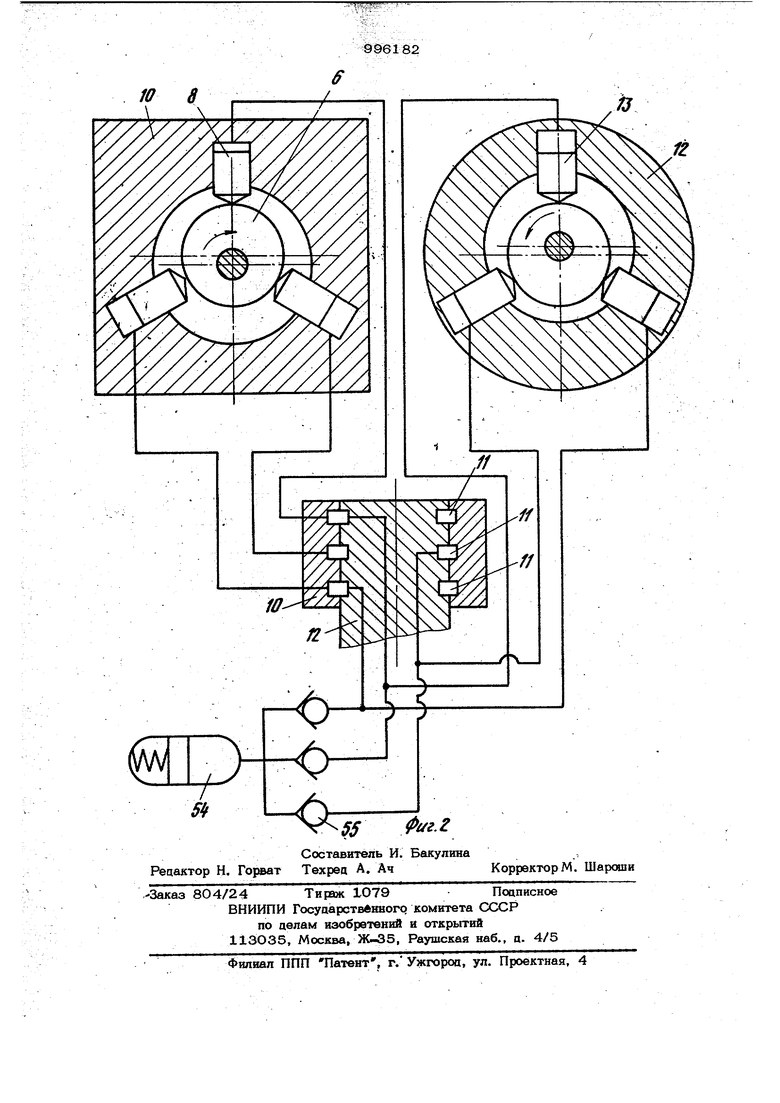
На фиг. 1 показана кинематическая схема манипулятора; на фнг. 2 - схема гидравлической связи межау плунжерами аналогичньк групп. 3& Манипулятор содержит звено 1 с выходным валом 2, к которому крепится захват или другой рабочий орган (не по казан). Это звено содержит также цепну передачу, состоящую из цепи 3 и звездочек 4 и 5, связанньсс соответствейно с валом 2 и эксцентриком 6. Корпус звен 1 соединен с эксцентриком 7. С эксцентриками 6 и 7 взаимодействуют соответственно плунжеры 8 и 9, распо- ложенные в дополнительном звене 10, Группа плунжеров 8 (три плунжера фиг. и 2) путем гидравлической связи, выпол ненной посредством трубопроводов (или каналов) и кольцевых канйлбв 11, расположенных в звене 10 и втулке 12, соединяется с группой плунжеров 13 (три плунжера), расположенных во втулке 12, образуя цилиндрическое шарнирное соецинение. Группа плунжеров 8 (та же три плунжера) аналогично связана с рлунжерами 14. Как видно из фиг. 2, для связи каждой группы плунжеров необходимо три канала, следовательно, в звене 1О и во втулке 12 должно быть выполнено шесть кольцевых каналов 11. Группы плунжеров 13 и 14 связаны че рез эксцентрики трубчатых валов соотве ственно со звездочками 15 и 16 звена 17. Фланец 18, скрепленный с дополнит льным звеном 10, связан со звездочкой 19. Втул.ка 12 скреплена со звездочкой 2О. С противоположной стороны звена 17 расположены звездочки 21 - 24, связан ные соответственно с группами плунжеров 25-28, само звено 17 связано с группой плунжеров 29 посредством эксцентриков, выполненных на концах валов так же как в предыдущем звене 1. Плун , жеры 28 через кольцевые каналы ЗО и сверления и каналы в дополнительном звене 31 и во втулке 32 связаны гидравлически с плунжерами 33. I Группа плунжеров 25 связана аналогичным образом с группой плунжеров 34, группа плунжеров 26 - с группой плунжеров 35, группа плунжеров 27 с группой плунжеров 36, группа плунже ров 29 - с группой плунжеров 37. Таки образом, при трех плунжерах в группе необходимы пятнадцать кольцевых канал 30. Гидравлическая связь групп показан на фиг. 2. Плунжеры 33 - 37, в свою очередь, соответственно связаны со зве дочками 38 - 42 звена 43, а фланец 44, скрепленный с дополнительным зве-
ном 31 связан со звездочкой 45.
тоянное угловое положение в пространст2Вал звездочки 38 скреплен с втулкой 32. .. Цепные передачи, расположенные в звене 43, связывают звездочки 38 - 42 и 45 соответственно с валом 46 (заторцможен) и с венцами (например, зубчатыми) 47 - 51, а само звено 43 - с венцом 52. Венцы связаны с приводными двигателями (не показаны). Опора 53 установлена на фундаменте. Ввиду, того, что в любой гидросистеме неизбежны утечки, предусмотрена подпитка каждого из двух блоков плунжеров, расположенных в дополнительных звеньях 10 и 31, посредством общего гицроакку- мулятора 54 и обратных клапанов 55 по одному на каждую пару гидравлически связанных между собой плунжеров. Манипулятор работает следующим образом. В связи с тем, что передаточное or. ношение всех цепных передач равно еци-; нице, при повороте венца 52 и при остановленных венцах 47 - 51 звено 43 вращается вокруг оси вала 46, а звездочки 38 - 42 и 45 сохраняют постоянное угловое положение в пространстве. Поэтому вся остальная часть манипуля- тора (дополнительное звено 10 и звено 1) также сохраняют постоянное угловое положение, а вал 2 не вращается. При вращении венца 51 движение пере дается звездочке 45, фланцу 44 и до « нительному звену 31. При этом ввиду того, что вал 46 остановлен, остановле- ны звездочка 38, группа плунжеров 33 и связанная с ними втулка 32. Вращение дополнительного звена 31 относительно втулки 32 не вызывает изменения рабочих объемов гидравлических передач, образованных гидравлически связанными между собой группами плунжеров, поэтому неподвижными остаются и группы плунжеров 25 - 29, а также вся остальная часть кинематической цепи манипулятора. При вращении венца 50 вращается и звезцочка 42, а также эксцентрик, взаимодействующий с группой плушке- Начинается возвратно-поступательное ров перемещение плунжеров 37 (фиг. 2), при этом гидравлическая связь с группой плунжеров 29 обеспечивает аналогичное их перемещение и вращение эксцентрика, связанного трубчатым валом со звеном 17. Звено 17 поворачивается, а звездочки 15, 16, 19 и 20 сохраняют noc-t .ве. При этом дополнительное звено 1О, звено 1 и выхоаной вал 2 этого звена также совершают поступательное жение. Поворот венца 47 вызьшает поворот звезаочки 39 и эксцентрика, связанного с группой плунжеров 34. Возвратно. поступательное движение этих плунжеров посредством гицравлйческсЛ связи через кольцевью каналы 30 вызывает анало- . гичное авижение ;группы плунжеров 25 поворачивающих эксцентрик, связанный со звездочкой 21. Далее поворачивается звездочка 19, фланец 18 и связанное с ним цополнител кое звено 1О. В связи с тем, что затор моженнай группа плунжеров 33 гидравлически связана с группсА, плунжеров 28, а они, в свою очередь, связаны со звезаочками 24 и 2О, и далее - со втулкой 12,эта втулка неправижна. -Относигельное вращение дополнительного звена 1О и втулки 12 не вызывает изменения рабо чихобъемов гидравлических передач, образованных группами плунжеров 8 и 13,9 и 14.. Поэтому звено 1 и выходной вал 2 не поворачиваются. . При повороте веноа 48 цепная переда ча звена 43 вызьшает поворот звездояки 4О, далее вращение передается группе плунжеров 35 и гидравлически связанной с ней группе плунжеров 26, звездочке 22, далее через цепную передачу звена 17 - звездочке 16, группе плунжеров 14 и гидравлически связанней с ней груп пе плунжеров 9. Плунжеры этой группы, перемещаясь, вращают эксцентрик 7, связанный со звенсм 1, которое поворачивается вокруг оси звездочки 5. В связи с тем, что группы плунжеров 8 и 13. остановлены,остановлен также эксцентрик 6 и звездочка 5, поэтому выходной вал 2 не вращается (совершает поступательное движение). При повороте венца 49 поворачивается эвезпочка 41, эксцентрик, взаимодействующий с группой плунжеров 36, пере- К1ещение которых вызьшает перемеиюние гидравлически связанных с ними плунжеров 27. Далее авижение пе| давтся звеэ почке 23, звездочке 15, группе плунжеров 8, эксцентрику 6, звездочке 5, це- пи 3, звездочке 4, и, наконец, валу 2. В связи с тем, что передаточное от ношение механических и гидравлических передач равны единице, угловые скорости полорота всех звеньев манипулятора равны угловым скоростям поворота венцов. Таким образом, манипулятор обеспечивает три поступательные степени под- вижносТи (при- вращении венцов 52, 50 и 48) и три вращательные степени пбдвижности (при вращении венцов 51, 49 и 47). При этом вращение мржет быть полно поворотным. Кроме того, ликвидируется взаимная зависимость различных видсш. движений, что существенно улучщает условия эксплуатации. Манипулятор допускает любые сочетайния перемещений и вращений при отсуту. ствии мертвых зон. Формула изобретения Манипулятор по авт. св.- N) 77О780, отличающийся тем, что, с целью расщирения технологических возможностей, он снабжен эксцентриками, кинематически связанными с приводом, а цополнигельные звенья содергжат два блока плунжеров, расположенных перпендикулярно друг к другу, каждый торых имеет аналогичные .группы плунжеров, причем группа, в свою очередь, содержит, по меньщей мере три, рабподоьженнь&с по окружности плунжера, пра этокГ плунжеры расположены с возможностью взаимодействия с эксцентриками, а блоки дополнительного звена кинематп чески связаны между собой, при 9Т( внутри блока плунжеры аналогичных групп гидравлически связаны. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 77О780, кл. В 25 5 1/02, 1980. }0 ffjffjffjff 47 ife fd S0№f VvV Ф 1ГТш ./ fj L
