жсние; на фиг. 9-то же, качало персмсщоипя захвата вправо; на фиг. 10 - то же, конец Перемещения захвата вправо; иа фиг. 11 - то же, иачало перемещения захвата справа налево.
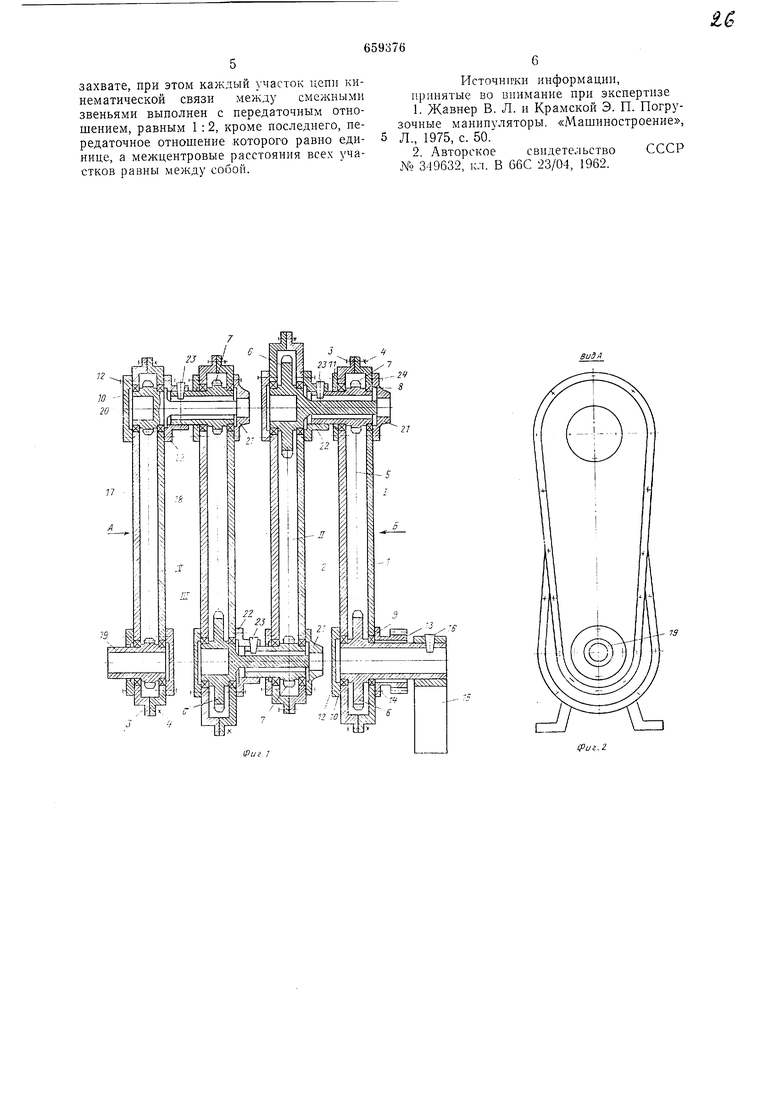
Манипулятор состоит из многозвенного, напри.мер четырехзвенного, исполнительноIO органа, звенья I, II, 1П и IV которого uiapjiiipHO сочленены и кинематически связаны .между собой и с основанием.
Каждое звено маиипулятора имеет корпус, состоящий из двух половин 1 и 2, стяпутых болтами 3 и гайками 4. В корпусе размеихена механическая (в данном случае цепная) ускоряющая передача с передаточным отношением i 1 : 2, включающая цепь 5, звездочку 6 с больп им числом зубьев, выполненную заодно с валом, и звездочку 7 с вдвое меньшим числом зубьев, также выполнеппую заодно с валом, причем этот вал пустотелый. Звездочки 6 и 7 установлены в половинах 1 и 2 корпуса на нодшииниках 8 и 9. Подшип шки 8 и 9 закрыты крышками 10 п 11, крепящимиея болтами 12.
К корпусу первого звена прикреплен веиец-шестерня 13 с помощью болтов 14. Валзвездочка 6 первого звена прикреплена к неподвижному основанию 15 с помощью штифтов 16.
Последнее (считая от основания 15) звено механизма имеет передаточное отношение цепной передачи i, и в соответствии с этим несколько другую форму половин 17 и 18 корпуса, соответствующую расположенным внутри звездочке, выполненной заодно с выходным валом-звездочкой 19, и валу-звездочке 20.
Корпус предыдущего звена, считая от оспования 15, соединяется со звездочкой 6 большего диаметра последующего звена с помощью шлицевого соединения, выполненного во фланце 21, а также на валу-звезлочке 6. Корпус последующего звена скреплен с валом-звездочкой 7 предыдущего звена с помощью переходника 22, штифтов 23 и болтов 24.
С венцом-шестерней 13 сцеплена соответствующая шестерня привода (на чертенке не ноказан). Вместо цепных передач в конструкции манипулятора могут быть црименены и другие виды механических передач (например, щестеренная) с сохранением передаточного отнощения и направлений вращения. Вращение ведущего и ведомого элементов механических передач должно быть направлено в одну еторону.
Манипулятор содержит четное число звеньев, причем межцентровые расстояния между валами механических передач звеньев должны быть одинаковыми.
Манипулятор работает следующим образом.
При повороте корпуса звена 1 относительно вала-звездочки 6 механической передачи этого звена выходной элемент iieре.тачп вал-звездочка 7 будет поворачиваться в противоположную корпусу сторону с угловой скоростью, в 2 раза большей угловой скорости поворота этого корпуса. Ввиду того, что с выходиым валом-звездочкой 7 звена 1 жестко соединен корпус звена П, этот корпус будет также поворачиваться с угловой скоростью, в 2 раза большей угловой скорости корпуса звена 1.
С корпусом звена 1 жестко соединен валзвездочка 6 механической передачи (большего диаметра) звена II, поэто.му этот валзвездочка неподвижен относительно корпуса звена 1, а выходной элемент (вал-звездочка 7) механической передачи звена П (меньшего диаметра) будет поворачиваться с угловой скоростью, в два раза большей угловой скорости звена 1, и в сторону,
противоположную нанравлению поворота корпуса звена II (совнадает с направление.м поворота корпуса звена I).
Таким образом, угловые скорости всех звеньев будут в два раза превышать угловую скорость звена 1. Направление вращения нечетных звеньев (считая от звена 1) будет совпадать с направлением вращения звена 1, а вращение четных звеньев - против направления вращения звена 1.
Выходное звено IV имеет передачу i l, поэтому угловая скорость выходного валазвездочки 19 механизма будет равна угловой скорости вращения корпуса этого звена, а направлена в противоположную сторону.
Ввиду наличия таких взаимных переме1цений и поворотов звеньев передвижение выходного вала 19 будет происходить строго по прямой линии, а выходной элемент
(выходной вал-звездочка 19) будет сохранять постоянное угловое положение.
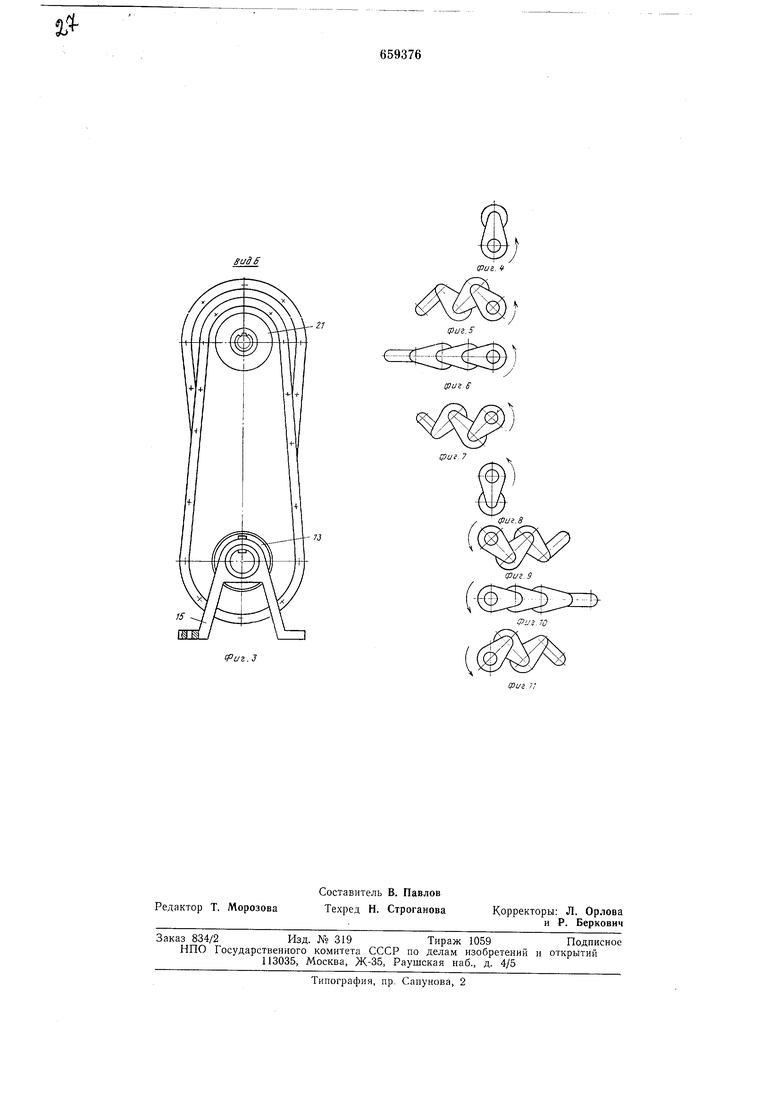
При непрерывном вращении звена 1 вокруг неподвижной оси вала-звездочки 6 механической передачи этого звена механизм
будет принимать форму в соответствии с фиг. 4-11 (положения обозначены через 45° поворота нервого звена).
Форм у л а изобретения
Манипулятор, содержащий многозвенный исполнительный орган, звенья которого шарнирно -сочленены и кинематически связаны между собой и с основанием, при этом
первое звено евязано с приводом, а последнее - с захватом, отличающийся тем, что, с целью расширения зоны обслуживаемого пространства путем исключения «мертвых зон и обеспечения возможности
двустороннего неремещения захвата, каждое последующее звено смонтировано на предыдущем с возможностью относительного поворота в шарнире сочленения, входное звено цепи кинематической связи жестко
aaKpeiuieiio на основании, а выходное - на
захвате, при этом каждый участок цепи кинематической связи между смежными звеньями выиолнен с передаточным отношением, равным 1 :2, кроме последнего, передаточное отношение которого равно единице, а межцентровые расстояния всех участков равны между собой.
Источн1гки информации, принятые во внимание при экспертизе
1.Жавнер В. Л. и Крамской Э. П. Погрузочные манипуляторы. «Машиностроение,
Л., 1975, с. 50.
2.Авторское свидетельство СССР № 349632, кл. В G6C 23/04, 1962.

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU872248A2 |
| Манипулятор | 1978 |
|
SU763080A2 |
| Исполнительный орган манипулятора | 1982 |
|
SU1050861A1 |
| Манипулятор | 1979 |
|
SU770780A1 |
| Манипулятор | 1981 |
|
SU996182A2 |
| Манипулятор | 1985 |
|
SU1284824A1 |
| Исполнительное устройство манипулятора | 1986 |
|
SU1414620A1 |
| Манипулятор | 1977 |
|
SU716806A2 |
| ТРУБОРЕЗНОЕ УСТРОЙСТВО | 1992 |
|
RU2041032C1 |
| Вибровозбудитель крутильных колебаний | 1989 |
|
SU1703197A1 |
Фиг J
ВиЭА
„-f
3
CpU..i
виде
73
сРиг.З
