«
05 ГчЭ
Изобретение относится к манипуляторам для механизации технологических процессов, включающих подъемно-транспортные и другие операции.
Цель изобретения - расширение технологических возможностей за счет получения дополнительного вращения захвата.
На чертеже изображена конструкция исполнительного устройства манипулятора.
Устройство манипулятора содержит осноредством звездочек 27 и 28 и цепи передает вращение на ведущее зубчатое колесо 30 цилиндрической зубчатой передачи с передаточным отнощением , расположенной в полости корпуса щарнира соединения. Далее посредством ведомого зубчатого колеса 31 и звездочек 32 и 33 и цепи 34, образующих цепную передачу с передаточным отнощением , расположенную в полости дополнительного выходного звена 7,
15
вание 1, выполненное разъемным, шарнир- ю вращение передается на вал 35, расположенный в конечном элементе 8 и связанный с захватом. Межцентровые расстояния всех звеньев 2-7 одинаковы.
Устройство манипулятора работает следующим образом.
При повороте вала 10 от приводного двигателя одновременно поворачиваются звездочки 12 и 13, основное выходное звено 3 и корпус основного входного звена 2. Вал остановлен, поэтому при вза- 2Q им ном обкате зубчатых колес 16-18 вокруг колеса 15 равенства делительных диаметров этих колес (угол поворота колеса 18) равны углу поворота корпуса основного входного звена 2, при этом направления вращения их совпадают. С колесом 18 соено установленные на нем основную пару входных звеньев 2 и 3 и дополнительное входное звено 4, основную пару выходных звеньев 5 и 6 и дополнительное выходное звено 7, щарнирно связанные с конечным элементом 8, захват (не показан) и приводы линейного перемещения конечного элемента 8 и ротации захвата. Основная пара входных звеньев 2 и 3 и дополнительное входное звено 4 связаны с основной парой выходных звеньев 5 и 6 и дополнительным выходным звеном 7 посредством шарнира соединения 9, корпус которого выполнен разъемным. Привод линейного перемещения конечного элемента 8 включает два двигателя 25 динено колесо 19, находящееся в зацеп- (не показаны), выходные валы которых СЕЯ-лении с колесами 20 и 21, расположензаны с валами 10 и 11, две кинема-ными в корпусе шарнира соединения 9 и
тические цепи, размещенные соответственно в полостях разъемных корпусов звена 2 основной входной пары звеньев и шарнира
соединения 9, и цепную передачу, располо- 3 тому поворот колес 20 и 21 происходит женную в полости разъемного основания 1.в сторону, противопо южную направлению
Ведущая звездочка 12 этой передачи установлена на валу 10, а ведомая звездочка 13 жестко связана с корпусом звена 2 основной входной пары звеньев. Причем второе звено 3 этой пары одним концом жестко связано с валом 10, а другим связано с корпусом шарнира соединения 9 посредством вала 14.
Кинематическая цепь, размещенная в полости основного входного звена 2, вклю- 40 поворачиваются зубчатые колеса 15-18, чает четыре аналогичных зубчатых колесаколесо 19, а также зубчатые колеса 20 и 21.
расположенные в шарнире соединения 9 и связанные с основными выходными звеньями 5 и 6. Поэтому происходит поворот только этих звеньев 5 и 6, а конечный эле- 45 мент 8 совершает поступательное движение,, обеспечивая перемещение рабочего органа вверх-вниз. В связи с тем, что вал 26 остановлен, поворот вала 35, связанного с захватом, не происходит.
При повороте вала 26 привода ротации вращение передается звездочкам 27 и 28, зубчатым колесам 30 и 31, расположенным в шарнире соединения 9, далее звездочек 32,
связанными с основными выходными звеньями 5 и 6. Зубчатые колеса 19-21 имеют одинаковые делительные диаметры, поэповорота колеса 19. В итоге поворот пары основных входных звеньев 2 и 3 происходит в сторону, противоположную вращению пары основных выходных звеньев 5 и 6, а равенство межцентровых расстояний этих звеньев обеспечивает прямолинейное перемещение конечного элемента 8 и вала 35, связанного с захватом.
При повороте вала 10 одновременно
15-18, находящихся в зацеплении друг с другом, причем ведущий вал этой кинематической цепи жестко связан с валом 14, а ведомый вал - с валом промежуточного колеса 19 кинематической цепи, размещенной в полости корпуса щарнира соединения 9 и имеющей три одинаковых зубчатых колеса 19-21. Причем валы 22 и 23 зубчатых колес 20 и 21 жестко связаны с соответствующими звеньями 5 и 6 основной выходной пары, последние из которых с помощью валов 24 и 25 связаны с конечным элементом 8.
Привод ротации захвата выполнен в виде двигателя (не показан), выходной вал которого связан с валом 26, и цепных передач с передаточным отношением , размещенных в полостях дополнительных входного 4 и выходного 7 звеньев. Вал 26 пос50
55
сообщающей через цепь 34 вращение звездочке 33 и валу 35, связанному с захватом.
Таким образом, предлагаемое исполнительное устройство обеспечивает три степени подвижности, две поступательных и одну
редством звездочек 27 и 28 и цепи передает вращение на ведущее зубчатое колесо 30 цилиндрической зубчатой передачи с передаточным отнощением , расположенной в полости корпуса щарнира соединения. Далее посредством ведомого зубчатого колеса 31 и звездочек 32 и 33 и цепи 34, образующих цепную передачу с передаточным отнощением , расположенную в полости дополнительного выходного звена 7,
тому поворот колес 20 и 21 происходит в сторону, противопо южную направлению
связанными с основными выходными звеньями 5 и 6. Зубчатые колеса 19-21 имеют одинаковые делительные диаметры, поэ тому поворот колес 20 и 21 происходит в сторону, противопо южную направлению
поворачиваются зубчатые колеса 15-18, колесо 19, а также зубчатые колеса 20 и 21.
поворота колеса 19. В итоге поворот пары основных входных звеньев 2 и 3 происходит в сторону, противоположную вращению пары основных выходных звеньев 5 и 6, а равенство межцентровых расстояний этих звеньев обеспечивает прямолинейное перемещение конечного элемента 8 и вала 35, связанного с захватом.
При повороте вала 10 одновременно
сообщающей через цепь 34 вращение звездочке 33 и валу 35, связанному с захватом.
Таким образом, предлагаемое исполнительное устройство обеспечивает три степени подвижности, две поступательных и одну
вращательную. При этом движения являются полностью взаимно независимыми.
Формула изобретения Исполнительное устройство манипулятора, содержащее основание, щарнирно установленную на нем основную пару входных звеньев, основную пару выходных звеньев, щарнирно связанных с конечным элементом, захват, шарнир соединения, установленный между основными парами входных и выходных звеньев и выполненный полым, и приводы линейного перемещения конечного элемента, включающие двигатели и две кинематические цепи, имеющие аналогичные зубчатые колеса, расположенные соответственно в полостях щарнира соединения и одного
звена основной пары входных звеньев, отличающееся тем, что, с целью раси ирення технологических возможностей за счет обеспечения вращения захвата, оно снабжено приводом ротации и дополнительными входным и выходным звеньями, выполненными полыми и соединенными между собой шарниром соединения при этом дополнительное входное звено связано с основанием, а дополнительное выходное - с конечным элементом, причем привод ротации выполнен в виде двигателя, размещенного на основании, и цепных передач с , расположенных в полостях дополнительных входного и выходного звеньев и кинематически связанных между собой, а захват установлен на выходном валу привода ротации.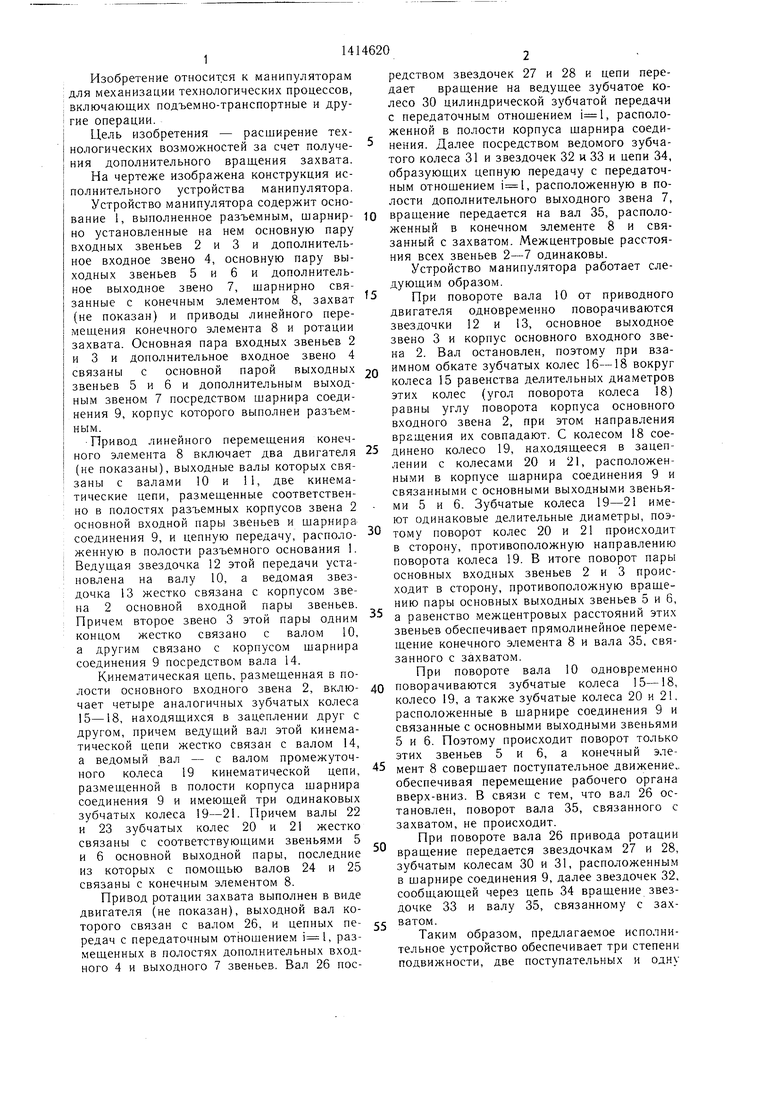
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1284824A1 |
| Манипулятор | 1978 |
|
SU763080A2 |
| Манипулятор | 1980 |
|
SU872248A2 |
| Манипулятор | 1979 |
|
SU770780A1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Манипулятор | 1977 |
|
SU659376A1 |
| Манипулятор | 1981 |
|
SU996182A2 |
| Цепной вариатор | 1979 |
|
SU1036986A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1050861A1 |
| ПРИВОД МАНИПУЛЯТОРА | 1992 |
|
RU2024387C1 |
Изобретение относится к манипуляторам для механизации технологических процессов, включаюншх нодъемно-транс- нортные и другие операции. Целью изобретения является расширение технологических возможностей за счет получения до- нолнительно(ю врап1ения захвата. Для этого исполнительное устройство манипулятора имеет привод ротации захвата, а также дополнительные входное 4 и выходное 7 звенья. Привод ротации захвата включает двигатель, выходной вал которого связан с валом 26, и цепные передачи с пере- даточны.м отношением , размеш.енные в полостях дополнительных входного 4 и выходного 7 звеньев. Вал 26 посредством звездочек 27 и 28 и цепи передает вращение на ведущее зубчатое колесо 30 цилиндрической зубчатой передачи, расположенной в полости корпуса шарнира сочленения. Далее посредством ведомого зубчатого колеса 3 и звездочек 32, 33 и цепи 34, образующих цепную передачу с передаточным отношением , расположенную в полости дополнительного выходного звена 7, вращение передается на вал 35, находящийся в конечно.м элементе 8 и связанный с захватом. Межцентровые расстояния звеньев 2-7 одинаковы. I ил. о СО
| Исполнительное устройство манипулятора | 1985 |
|
SU1274919A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
