(54) ДЛИННОБАЗОВЫЙ ПЛАНИРОВЙЩК
| название | год | авторы | номер документа |
|---|---|---|---|
| Планировщик | 1982 |
|
SU1089199A1 |
| Длиннобазовый планировщик-профилировщик | 1980 |
|
SU933885A1 |
| Прицепной длиннобазовый планировщик | 1980 |
|
SU941483A1 |
| Планировщик откосов | 1981 |
|
SU987041A1 |
| Автоматический планировщик | 1980 |
|
SU1051170A1 |
| Длиннобазовый навесной планировщик | 1958 |
|
SU123779A1 |
| Планировочная машина | 1980 |
|
SU909028A1 |
| Способ планировки и почвообработки перед посевом и комбинированное орудие для его осуществления | 1989 |
|
SU1762772A1 |
| Устройство для производства фрезерного торфа | 1990 |
|
SU1776311A3 |
| ДЛИННОБАЗОВЫЙ ПЛАНИРОВЩИК | 1973 |
|
SU386084A1 |
Изобретение относится к мелиора(тивному, строительному, дорожному и торфяному машиностроению, а точнее jK длиннообразным планировщикам - профилировщикгм, предназначенным для планировки и создания поперечных уклонов поверхности полей, дорог и т.п.
Известен длиннобазовыи планировщик, включающий раму н расположенный между передней и задней опорами рабочий орган tl.
Недостатком указанного планировщика является то, что его длинная V-образная рама выполняется из массивных балок и имеет большую металлоемкость.
Наиболее близким по технической сущности к изобретению является длин нобазовый планировщик, включающий треугольную плоскую раму, установлен ные на ней переднюю и заднюю опоры, рабочий орган, который размещен между опорами, механизм подъема и опускания рабочего органа, стойку, жестко установленную на раме и связанную с ней посредством гибких связей, при этом рабочий„орган соединен тягами с передним концом рамы t2 .
Недостаток данного планировщика заключается в том, что верхний гибкий пояс треугольной рамы выполнен однвплоскостным, а поэтому она не может воспринимать боковых нагрузок, возникающих при работе планировщика, рабочим органом которого является, например, шнековая фреза с большой шириной захвата. Боковые вергикаль10ные нагрузки воспринимать может только непосредственно жесткая часть рамы, а гибкие связи при зтом в работе не участвуют.
Цель изобретения - обеспечение
15 пространственной жесткости рамы планировщика.
Цель достигается тем, что в длиннобазовом планировщике, включающем треугольную плоскую раму, установ20ленные на ней переднюю и заднюю опоры, рабочий орган, которых размещен между опорс1ми, механизм подъема и опускания рабочего органа, стойку, установленную на раме и связанную с
25 ней посредством гибких связей, при зтом рабочий орган соединен тягами с 1ередним концом рамы, стойка установлена на раме шарнирно, при зтом гибкая связь, идущая к задней опоре,
30 составлена из двух ветвей, установленных под углом между ними, а рама снабжена дополнительной стойкой, жестко прикрепленной к раме снизу,, при этом указанная стойка снабжена, в свою очередь, гибкой связью, составленной из двух ветвей, установленных под углом между ними и прикреплены другими концами к задней опоре, и жесткой тягой, прикрепленной к передней опоре, причем тяги рабочего органа, который установлен непосредственно у задней опоры, выполнены жесткими и прикреплены к нижней дополнительной стойке в одной точке.
Кроме того, все гибкие связи снабжены талрепами.
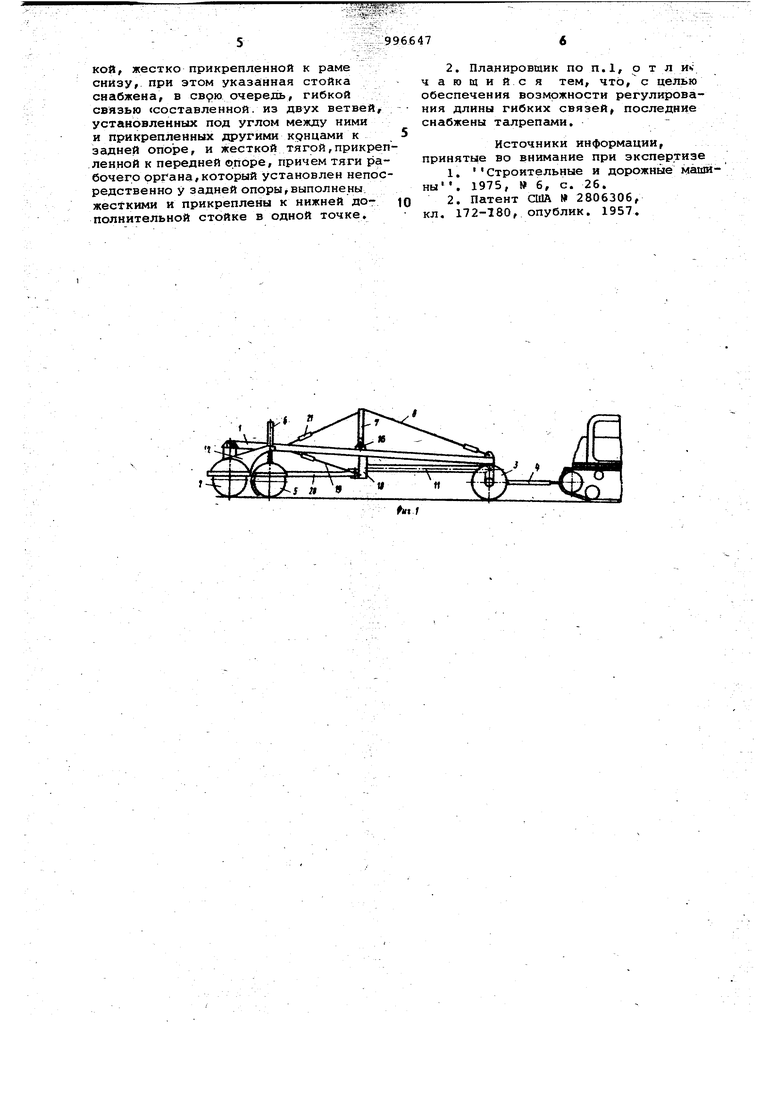
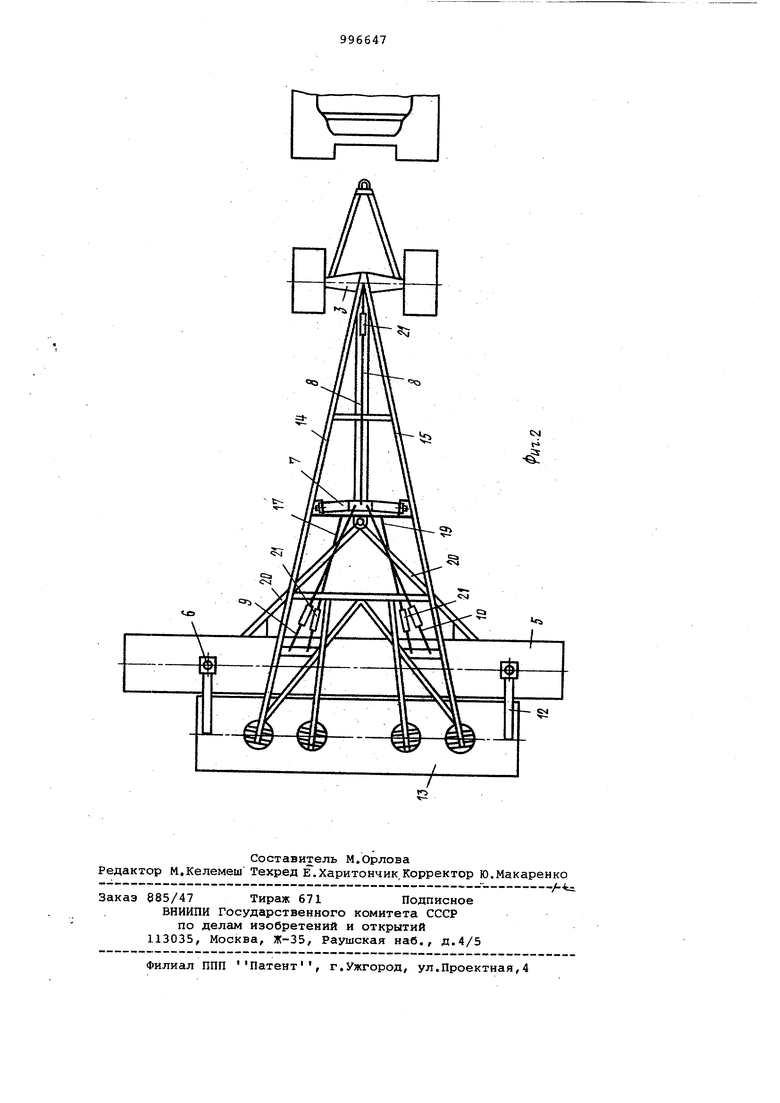
На фиг.1 изображен длиннобазовый планировщик, вид сбоку; на фиг.2 то же, вид сверху.
Длиннобазовый планировщик состоит из треугольной плоской рамы 1, опиранадейся на заднюю опору 2 и переднюю опору 3 с дьпнлом 4, и рабочего органа 5, который размещен между опорами, механизм подъема и опускания рабочего органа, выполненного в виде гидроцилиндров б, стойку 7, установленную на раме 1 и связанную с ней посредством гибких связей 8, 9.и 10, при этом рабочий орган соединен тягой 11 с определенным концом рамы. Рабочим органом 5 является шнековая фаза, которая подвешена с помощью гидроцилиндров 6 к кронштейнам 12 рамы 13 задней опоры 2. Шнековая фреза 5 с помощью гидроцилиндров 6 может изменять свой угол наклона в поперечной плоскости. Треугольная плоская рама включает продольные балки 14 и 15.. Стойка 7 установлена на раме с по мощью горизонтального шарнира 16, KO позволяет перемещаться ее верхнему концу вдоль оси рамы йланировщика. Гибкая связь, идущая к задней опоре, составлена из двух ветвей (вантов) 9 и 10, установленных под углом между ними. Получив натяжение (при попадании, например, включенияпод правый по ходу движения машины конец фрезы), верхний левый вант 9 и передний 8 вследствие шарнирной установки стойки 7 натянут и верхний правый вант 10, т.е. нагрузка дифференцировано, в зависимости от углов установки вант и места приложения нагрузки распределяется между вантами рамы. При этом нижний левый.вант 17 остается ненатянутым и, следовательно/ некоторая часть закручивающего момента приходит 3я и на жесткую часть рамы машины. Рама 1 снабжена Дополнительной стойкой 18, жестко прикрепленной снизу к раме, при этом нижняя стойка снабжена гибкой связью составленной также (как в верхнем гибком поясе рамы) из двух ветвей .17 и 19, ycтaнoвJleнныx под -углом между
ними и прикрепленных другими концами к задней опоре,- и жесткой тягой 11, прикрепленной к передней опоре 3, причем тяги 20 рабочего органа, который установлен непосредст венно у задней опоры 2,выполнены7 я(есткими и прикреплены к нижней дополни тельной стойке 18 в одной точке.
Жестко соединенная с рамой 1 нижняя дополнительная стойка 18, гибкие связи 17 и 19 и.тяга 11 в виде трубы в которой расположен соединительный вал трансмиссии, также являются усиливающими элементами рамы 1. Натяже ние гибких связей производится талрепами 21.
Длиннобазовый планировщик работает следующим образом.
При движении машины вперед сила тяги от трактора к задней опоре 2 передается ПЕЮДОЛЬНЫМИ балками 14 и 15 рамы 1, гибкими связями 17 и. 19 и трубой 11, верхние гибкие связи пр этом в работе не участвуют. При поступательном движении машины назад от трактора до задней опоры передаетсятеми же продольными баками 14 -и 15,но BCTynaioT в работу гибкие связи 9, Юи 8, причем, так как эти гибкие связи расположены под углом друг к другу, они создают про странственное распределение сил, а за счет того, что эти гибкие связи соединены свободным концом шарнирно установленной на треугольной раме 1 стойки 14, эти силы в гибких связя 9, 10 и 8 распределены дифференцировано по своим величинам. Вследствие такого распределения сил по своим направлениям и величинам рама 1 работает как единая жесткая форма.
Использование шарнирно установленной на раме стойки в сочетании с гибкими связями позволяет придать раме широко-захватного планцровщикапрофилировщика, необходимую прочност и жесткость при меньшей металлоемкости конструкции.
Формула изобретения
Источники информации, принятые во внимание при экспертизе
