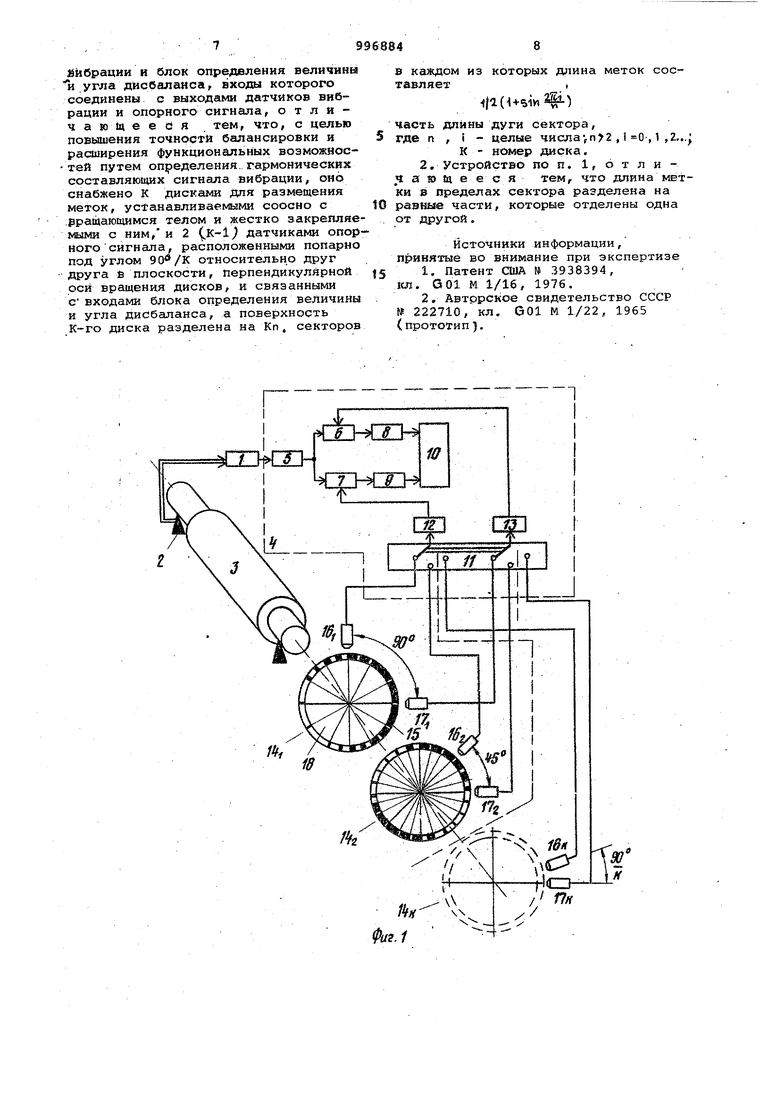
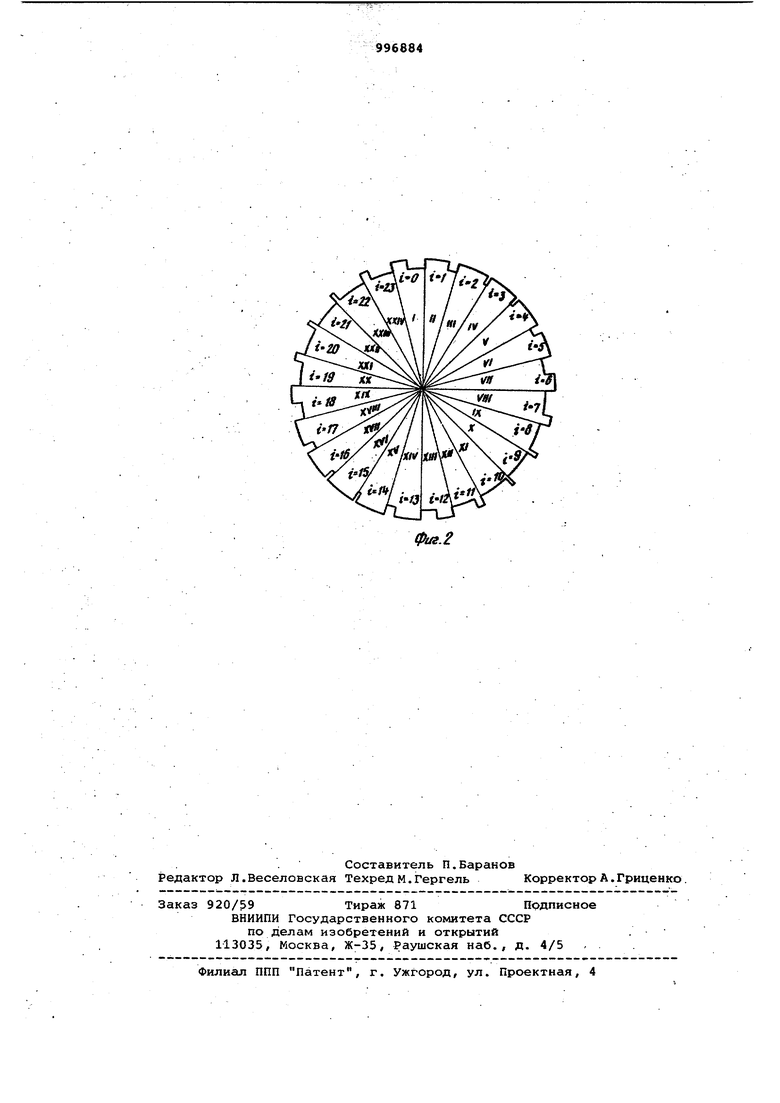
Недостатком устройства является невысокая точность и существенные погрешности измерений проекций вектора дисбаланса, связанные с присут ствием верхних гармонических сос: тавляющих в опорном сигнале прямоугольной формы. Это объясняется тем что полезную информацию о прямоугол ной проекции вектора дисбаланса нес лишь первая гармоника сигнала дисбаланса, поэтому повышение гармоник представляет собой погрешность изме рения этой проекции. Аналогично об разуется погрешность при формирован второй прямоугольной проекции, кото рая получается при перемножении опорного сигнала, сдвинутого на 90® на сигнал дисбаланса. При перемноже нии нечетных гармоник сигнала векто ра дисбаланса синхронных гармоника прямоугольного сигнала, образуется активная компонента. Измерение прямоугольных проекций осуществляется с погрешностью, так как постоянная, составляющая определяется суммой всех активных компонент. Таким образом, из-за косинусоидальности опо ного сигнала измерение прямоугольных проекций осуществляется с погрешностью., а значит и получаемая из этих проекций информация об амплитуде и фазе вектора дисбаланса вращающегося тела будет неточной. Кроме того, устройство не обеспечивает функций анализа гармонически составляющих вектора, вибраций вращающихся тел, что ограничивает возможность получения полной информаци о его параметрах на кратных гармониках.. , Цель изобретенияг - повышение точ ности балансировки и расширение фун циональных возможностей.путем определения гармонических составляющих сигнала вибрации. Поставленная цель достигается тем, что известное устройство снабжено К дисками для размещения меток устанавливаемыми соосно с вращающим ся телом и жестко закрепляемыми с ним, и 2(К-1) датчиками опорного сигнала, расположенными попарно под углом 90/К относительно друг друга в плоскости, перпендикулярной оси вращения дисков, и связа1нными с входами блока определения величины и угла дисбаланса, а поверхность К-го диска разделена на Кп секторов в каждом из которых длина меток составляет / . i часть длины дуги сектора, где я , 1 - целые числа п 2 ; i 0 ,1 ,. . К - номер диска. Кроме того, длина метки .в предел сектора разделена на: равные части которые отделены одна от другой. На фиг. 1 приведена блок-схема устройства; на фиг. 2 - конструкция диска для размещения меток. Устройство содержит датчик 1 вибрации, установленный на опоре 2 вращающегося тела 3, блок 4 определения величины и угла дисбаланса, выполненный в виде усилителя 5, вход coтopoгo соединен с выходом датчика 1 вибрации, электронных ключей 6 и 7, входы которых связаны с выходом усилителя 5, интеграторов 8 и 9, подключенных соответственно к выходам кличей 6 и 7, индикатора 10, входы которого соединены с выходами интеграторов 8 и 9, коммутатора 11 и формирователей 12 и 13, входы которых соединены с выходами коммутатора 11, а выходы - с вторыми входами электронных ключей 6 и 7, соответственно, К дисков 14ц, устанавливаемых соосно с вращающимся телом 3 и жестко закрепляемых с ним, на которые нанесены светоконтрастные метки 15)1 - 2 К датчиков 16 16 и 17к; опорного сигнала, расположенных попарно под углом 90°/К относительно друг, друга в плоскости, перпендикулярной оси вращения дисков, и связанных с входами коммутатора 11 блока 4 определения величины и угла дисбаланса.. Поверхность каждого из. К дисков 144 разделена на Кп секторов- 18, в каждом из которых длина.меток 15 составляет 1/2С 1+51К1 ) часть длины дуги сектора 18, а длина меток в пределах сектора разделена на равные части, которые отделены одна от другой. f, Устройство работает следующим образом. При вращении тела 3 вращаются и жестко связанные с ним диски 14 с нанесенными на них светоконтрастными метками 15. Когда метки 15, нанесенные по периметру дисков 14 по определенному закону, проходят мимо датчиков 16 и 17 опорного сигнала, последними вырабатываются электрические сигналы, которые через соответствующие входы коммутатора 11 поступают на формирователи 12 и 13, где усиливаются и формируются в прямоугольные импульсы. Опорные сигналы на выходах формирователей 12 и 13 сдвинуты на четверть периода, причем частота этих сигналов всегда синхронна частоте вращения тела 3 и равна ей, если сигнал получается от датчиков 16 (С и 17 |с, расположенных у К-го диска 14ц. Форма, частота и закон изменения порного сигнала обусловлены законом азмещения меток 15. Рассмотрим, как заданы длина еток 15 и место их расположения для частотного случая (например, для вт рого диска, ). Пусть диск 14 разделен на п сек торов (например, п 12). Таким образом, диск 142, разделен на 24 се тора. В секторе 1 Iслева направо ) нанесена метка 15, далее промежуток равный по длине метки, снова метка и т.д. При прохождении этого сектор мимо датчика 1б2 опорного сигнала, на выходе формирователя 12 появляет электрический сигнал, один период которого представляет собой прямоугольное симметричное напряжение Смеандр). Нгизичию метки соответству сигнал с амплитудой U , а отсутств метки - сигнал с амплитудой -U . В зависимости от длины метки 15 по дуге окружности сектора 18 среднее значение сигнала изменяется в пределах от - и до 4-и и., наоборот. Длина меток выбирается такой, что при вращении диска 142: среднее зна чение опорного сигнала изменяется по синусоидальному закону с частото в два раза большей частоты вращения тела 3, т.е. имеет место широтноимпульсная модуляция. .Для первого диска 14 средние зн чения изменяются по синусоидальному закону с частотой, равной частоте вращения , а для К-го диска частота превышает частоту вращения в К раз. Т.очность формирования сину соидального закона определяется точ ностью формирования значений отдель ных углов. Очевидно, что чем на большее число Кп секторов 18 будет разделен диск 14, тем ближе к сину соидальному будет закон изменения. Качествааппроксимации будет еще выше, если длина метки 15 в пределах дуги сектора 18 разделена на любое число равных частей, котоЕяле отделены одна от другой, что обусловливает более плавные переходы . ,между точками аппроксимации. Выходы формирователей 12 и 13 прямоугольных импульсов подключены к управляющим входам электронных ключей б и 7, .на другие входы кото рых поступает ангшоговый сигнал да чика 1 вибраций .T0 5iMCjC«i+ j), где и - амплитуда j гармоники сигнала вибрации ; частота вращения тела; начальная фаза j гармоники сигнала вибрации; номер гармоники сигнала вибрации. Относжгельное время пребывания ключа б в замкнутом состоянии равно y 5SiiviKvyt- -2. а ключа 7 j--1Cos lttt;t 4;, где -у - часть, которую составляет длина метки 15 в пределах дуги сектора 18 от длины дуги сектора 18. Среднее значение сигнала на вы ходе ключей 6 и 7 и К. (jcjui4 })cosKcutdcut - U-ytf ub(jt)UVj)cosK «tawt Для , что соответствует первой гармонике сигнала вибрации, напряжение на выходе ключей составляет Uк l U1S1nV|, U -1/2U coeV, и характеризует проекции вектора дисбаланса по двум взаимно перпендикулярным осям. . ; Остальные гармоники не принимают-, ся в расчет, так как они зависят от частоты, и как переменные величины отфильтровываются в интеграторах 8 и 9. Оба полученных сигнала обрабатываются в блоке 10 регистрации, где из проекций сигнала дисбаланса могут быть непосредственно получены параметры амплитудал и фазы любой гармоники. . . Таким образом, применение в устройстве К дисков с метками, нанесенп ными на их поверхности по определен ному закону, и применение 2К датчиков опорного сигнала, расположенных попарно под углом относительно друг друга в плоскости дисков, обеспечивает возможность производить полный гармонический анализ (с определением амплитуд и фаз) сигнала дисбаланса вращающегося тела. Причем: процесс такого анализа сврдит- ся к смене дисков 14, набор которых с разными законами нанесения меток может быть подготовлен для наиболее характерных исследуелалх частот. Естественно, что при производится измерение параметров вектора дисбаланса . Эти измерения проводятся с .повышенной точностью, так как опорный сигнал ( дискретный во времени) более точно аппроксимирует синусоиду , а это значит, что погрешность/ обусловленная высшими гармоническими составляющими вектора вибраций,, будет значительно ниже. Формула изобретения 1. Устройство для измерения параметров вектора дисбаланса вращающегося тела, содержащее два датчика опорного сигнала, светоконтрастную метку, связываемую с телом, датчик.
вибрации и блок определения величины и угла дисбаланса, входы которого соединены с выходами датчиков вибрации и опорного сигнала, отличающееся тем, что, с целыо повышения точности балансировки и расширения функциональных воэможяостей путем определения, гармонических составляющих сигнала вибрации, оио снабжено К дисками для размещения меток, устанавливаемыми соосно с .рращающимся телом и жестко закрепляемыми с ним, и 2 (,К-17 датчиками опорного сигнала, расположенными попарно под углом относительнр друг друга Ё плоскости, перпендикулярной рей вращения дисков, и связанными С входами блока определения величины и угла дисбаланса, а поверхность К-го диска разделена на Кп, секторов
в каждом из которых длина меток составляет(
|a(-sш)
часть длины дуги сектора, где п , i - целые числа п 2 ,1 0 ,1 ,2...
К - номер диска.
2. Устройство по п. 1, 6 т л и чаюыееся тем, что длина МЕТКИ 8 пределах сектора разделена на равные части, которые отделены одна от другой.
Источники информации, принятые во внимание при экспертизе 1. Патент США 3938394, 1Ш. Q01 М 1/16, 1976.
2. Автррское свидетельство СССР № 222710, кл. G01 М 1/22, 1965 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования опорных гармонических сигналов | 1977 |
|
SU658706A1 |
| Устройство для измерения параметров вектора вибросмещений ротора | 1977 |
|
SU872970A1 |
| Измерительное устройство к станку длядиНАМичЕСКОй бАлАНСиРОВКи POTOPOB | 1978 |
|
SU749191A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕКТОРА ДИСБАЛАНСА ВРАЩАЮЩЕГОСЯ ТЕЛА | 2006 |
|
RU2344393C2 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОЛЕЦ ПОДШИПНИКОВ КАЧЕНИЯ | 1996 |
|
RU2098789C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ НЕПОДВИЖНОГО КОЛЬЦА ПОДШИПНИКА КАЧЕНИЯ В ДВУХОПОРНОМ УЗЛЕ | 1997 |
|
RU2124190C1 |
| Измерительное двухканальное устройство к балансировочному станку | 1978 |
|
SU746226A1 |
| Способ определения параметров вектора дисбаланса роторов и устройство для его осуществления | 1986 |
|
SU1392414A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
-Ж-,
idiHiziH
