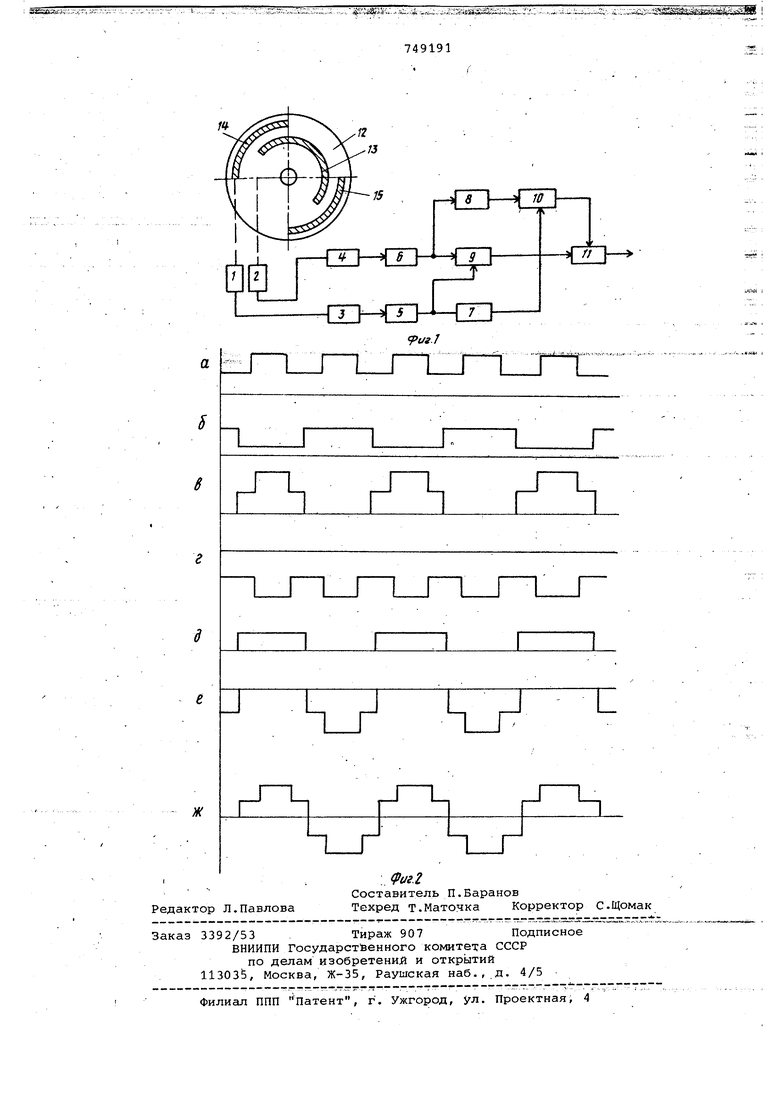
(54) ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К СТАНКУ ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ I-..-,.:.:-,...... .......... , ... Устройство относится к измери-; тельной технике и может быть использовано в балансировочных станках, а также в других объектах, где работа электронных блоков должна быть синхронизирована с вращающимися телами. Известно измерительное устройство для динамической балансировки, содер жащее датчики дисбаланса, систему оп ределения дисбаланса и генератор опорного сигнала в виде последовател .но соединенного датчика метки, усилителя и формирователя импульсов, и метки, нанесенной на поверхности ротора l.о Формирователь импульсов содержит генератор пилообразного напряжения и ограничитель, преобразующие усиленный сигнал ОТ метки на поверхности ротора в прямоугольные импульсы опор ного напряжения. Недостатком устройства явл;Гется изменение длительности импульсов опорного напряжегшя в связи с нестабильностью работы формирователя импулйсов, что снижает точность балансировки . Наиболее близким к изобретению по технической сущности является измерительное устройство к станку для РОТОРОВ динамической балансировки роторов, содержащее систему определения дисбаланса, к связанные с нею датчики дисбаланса и генератор опорного сигнала, выполненный в виде двух каналов, каждый из которых состоит из последовательно соединенных датчика метки, усилителя и формирователя импульсов, двух электронных ключей и метки, нанесенной на дуге 180 .на торцовой поверхности ротора 2. Недостатком устройства является то, что прямоугольный опорный сигнал в форме меандра характеризуется наличием третьей, пятой и других высших гармоник. Для системы определения дисбаланса, для которой сигнал является опорным, характерны погрешности из-за этих высших гармоник, снижающие точ;ность определения величины, и угла дисбалансой, что ограничивает точность балансировки. Цель изобретения - повышение точности балансировки. Цель достигается тем, что генератор опорного сигнала устройства снабжен двумя инверторами и сумматором, входы которого подключены к выходам электронных ключей, входы инверторов н первого ключа соединены с выходами формирователей импульсов, выходы ин BBpiopOB - со входами второго ключа, на поверхности ротора нанесены две противоположно расположенные относитеттъно его оси вращения метки в виде дуги в 90° каждая, и смещенныё относительно первой метки на 45 по дуге окружности, первый датчик выставлен ,относительно метки на дуге 180, а второй - относит ельно двух других йёток. , - . На фит. 1 представлена-блок-схерла устройства; на фиг. 2 - вре:менные диаграммы сигналов генератора опорно ГО сигнала. - ..-- :Л vX;;rt; Устройство содержйт датчйКдисбаланса, систему определения дисбаланса (на блок-схеме условно не пока заны) и связанный с нею генератор Ойорного сигнала, выполненный в виде двух каналов, каждый из которых сост ит из последовательно соединенных датчика 1 (2) метки, усилителя 3 (4) и формирователя 5 (б) импульсов, Двух инверторов 7 и 8, двух электрон ных ключей 9 и 10 и сумматора 11, входыкоторого подключены к выходам электронных, ключей 9 и 10, входь инверторов 7 и 8 и первого ключа 9 соединены с выходами формирователей импульсов 5 и б, выходы инверторов 7 и 8 связаны с входами второго ключа 10, а на поверхности ротора 12 нанесены три метки 13-15 первая из которых (метка 13) выполнена на дуге 180, а вторая 14 и третья 15 метки нанесены на дуге 90 на торцовой поверхности ротора 12 и смещены относительно первой метки 13 на 45 по дуге окружности на торцовой поверхности ротора 12, пёрвый датчик метки. 1 выставлен относительно метки 13 на дуге 180, а второй датчик ме ки 2 - относительно двух других меток 14 и 15. Устройство работает следующим об разом,- - - При вращении ротора 12 с метками 13 и 15 на выходах датчиков 1 и 2 меток после усиления в усилителях 3 и 4 и формирования в формирователях 5 и б образуются прямоугольныё импульсы (фиг.2 а и б). Импульсы (фиг.2а) показаны с постоянной составляющей, равной .амплитуде импуль са (введение постоянной составляюще может быть OCytaetfrBJigHOэ Ус:йЛй1еле и на блок-схеме, отдельно не изобра жено ) . Сйтнапьа ftocryrfaioT ный ключ 9, на выходе которого обра зуётсЯ. сигнЖл ступенчатой формы i фиг . 2 в У . : v: Вторая полуволна опорного сигнал формируется В результате инвертиров ния импульсов с выхода форМИр6Ва :ёл 5 и б (фиг.2 г и д) и преобразования в электронном ключе 10 (фиг.2г) ёйгналы с выходов обоих ключей 9 и
749191 поступают на сумматор, где принимат окончательный вид (фиг.2ж). Такой сигнал ступенчатого типа не меет в. своем спектре третьей и пятой гармоники, также отсутствуют все четные гармоники, т.е. таким образом сформированный о.порный сигнал характеризуется лучшим качесТвенньпч составом гармони.ческих составляющих и поэтоМу да§т значительно меньшие погрешности при работе с устройством , определения дисбаланса величины, тем более, что величина высших нечетных гармоник (выше пятой) в составе измеряег,1ых механических сигналов оче«ь малы. Амплитуда опорного сигнала не зависит от частоты вращения, так как его формирование осуществляется дискретными элементами. Указанный опорный сигнал обеспечивает определение величины и угла дисбаланса известными методами. Введение в устройство нового технического решения генератора опорных сигнс1лов позволяет улучшить качественный состав Jгapмoничecкиx составляющих опорного сигнала, а следовательно, повысить точность балансировки. Формула изобретения Измерительное устройство к станку для динамической балансировки роторов, содержащее систему определения дисбаланса и связанные СНею датчики дисбаланса и генератор опорного сигнала, выполненный в виде двух каналов, каждый из которых состоит из последовательно соединенных датчика метки, усилителя и формирователя импульсоЁ, двух электронных ключей и метки) нанесенной на дуге на торцовой поверхности ротора, о т личающееся тем, что, с целью повйшеНйя точности балансировки, генератор опорного сигнала снабжен двумяинверторами и сумматором, входы котороТо подключены к выходам электронных ключей, входы инверторов и первого ключа соединены с выходами формирователей импульсов, выходы инверторов - со входами второго ключа, на поверхности ротора нанесены две противоположно расположенные относительно его оси вращения метки в виде дуги в 90 каиодая, и смещенные относительно первой метки на по дуге окружности, первый датчик выставлен относительно метки на дуге 180°, а второй - относительно двух других меток, Источники информации, принятые во внимание при экспертизе 1.Ковалёв М.П. и др. Динамическое и статическое уравновешивание гироскопических устройств. М., Машиностроение, 1974, с. 154. 2.йвТбрЬкое свидетельство СССР №222710, кл. G 01 М 1/22, 1965 (прототип ) .
SJESSSjj-,r;:-Xr;M
ш
- .-.: .
749191
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров вектора дисбаланса вращающегося тела | 1979 |
|
SU996884A1 |
| Устройство для определения вектора дисбаланса | 1983 |
|
SU1193474A1 |
| Устройство для динамической балансировки роторов | 1985 |
|
SU1293508A1 |
| Измерительное устройство к балансировочному станку | 1979 |
|
SU896438A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1982 |
|
SU1055980A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| Устройство для определения вектора дисбаланса | 1990 |
|
SU1755081A1 |
| Устройство для измерения величины и угла дисбаланса изделий | 1981 |
|
SU974172A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И МЕСТА ДИНАМИЧЕСКОЙ НЕУРАВНОВЕШЕННОСТИ ВРАЩАЮЩИХСЯ ТЕЛ | 1965 |
|
SU222710A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
/
