(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ РУДНИЧНОГО ЭЛЕКТРОВОЗА
1
Изобретение относится к угольной промышленности и предназначено для автоматизации процесса движения рудничных электровозов, используемых в качестве отдельной подвижной единицы, для работы по системе многих единиц, а также используемых в системе автоматического вождения рудничных поездов.
По основному авт. св. № 939309 известно устройство автоматического управления скоростью движения рудничного электровоза, содержащий задатчик ускорения, выход которого через управляемый фазовращатель и первый интегратор подключен на первые входы первого, второго и третьего элементов сравнения, второй вход первого элемента сравнения соединен с выходом задатчика скорости, а вторые входы второго и третьего элементов сравнения соединены с выходами датчиков скорости вращения колесных пар электровоза, выходы второго и третьего элементов сравнения Через подключенный своим выходом к входу первого выпрямителя блок выделения максимального и минимального сигнала, скорости, подключены к входу второго интегратора, выход которого соединен с третьим входом блока выделения максимального и минимальнорр сигнала скорости и входом управляемого привода, устройство содержит также элемент И, элемент НЕ, второй выпрямитель и ключевые э лементы, причем выход первого эле5 мента сравнения через первый ключевой элемент, а выход Олока выделения максимального и минимального сигнала скорости через второй ключевой элемент подключен к второму входу фазовращателя, один вход элемен,„ та И соединен с выходом первого выпрямителя, другой вход через второй выпрямительсоединен с выходом первого элемента сравнения, а выход элемента И подключен к уп-, равляющему входу второго ключевого эле-; мента и через элемент НЕ и управляющему15 входу первого ключевого элемента.
Разгон электровоза до заданной скорости движения устройство управления производит ho заданной программе путем. повыщения напряжения питания тяговых электро двигателей. При этом боксование кблёсных пар обнаруживается устройством управления по разности мгновенно задаваемой скорости (программы разгона) и фактической скорости одной из колесных пар 1.
Однако при работе аккумуляторной батареи в зоне предельного разряда (характеризуемой разрядным током конечным напряжением и оставшейся емкостью) тяговые двигатели питаются полным имеющимся на батарее напряжением, которого недостаточно для поддержания заданного темпа разгона. Между мгновенно задаваемой скоростью и фактическими скоростями вращения колесных пар появляется рассогласование, полярность которого противоположна полярности рассогласования этих же скоростей при боксовании и которое из-за отсутствия возможности увеличения напряжения питания на двигателях не может быть устранено устройством управления. В этих условиях функции противобоксовочной защиты нарущаются и появляется опасность возникновения боксования колесных пар.
Целью изобретения является повышение надежности управления.
Поставленная цель достигается тем, что устройство снабжено последовательно соединенными дифференцирующим элементом, дополнительными элементами НЕ и И, и третьим ключевым элементом, через который первый элемент сравнения соединен с задатчиком скорости, при этом вход дифференцирующего элемента подключен к источнику питания привода, а другой вход дополнительного элемента И соединен с выходом второго выпрямителя, а выход - с управляющим входом третьего ключевого элемента.
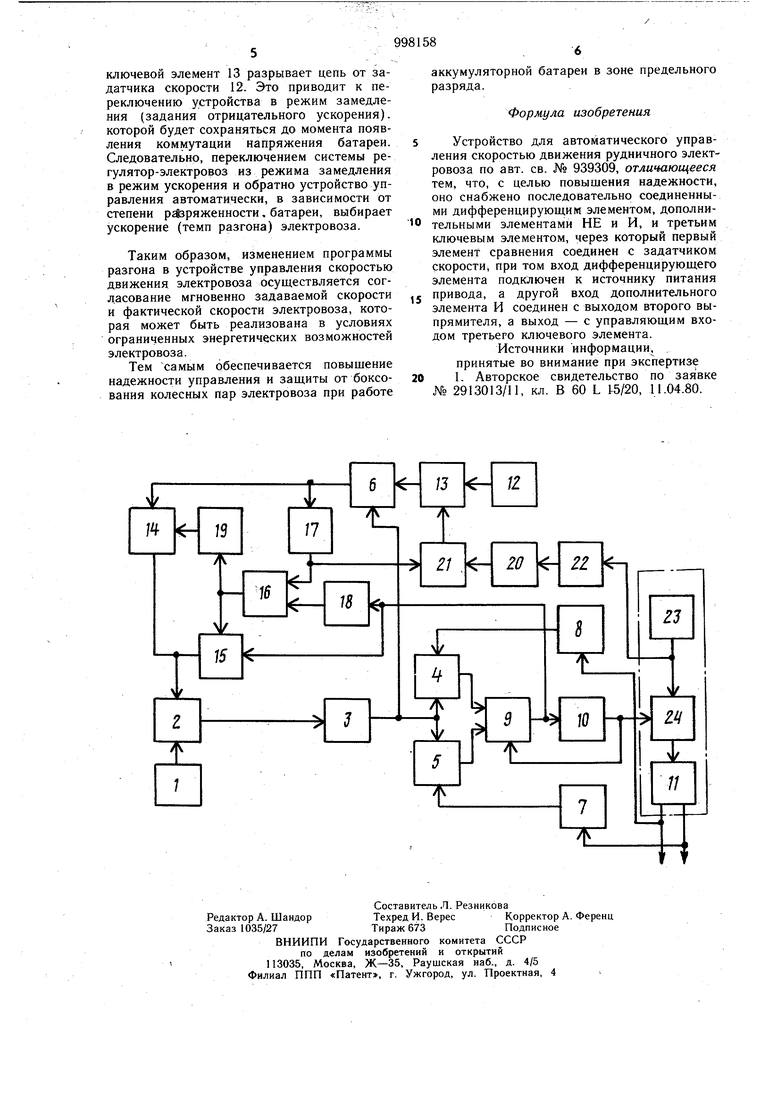
На чертеже показана блок-схема устройства для автоматического управления скоростью движения рудничного электровоза.
Устройство содержит задатчик 1 ускорения, соединенный через фазовращатель (релейный элемент) 2 и первый интегратор 3 с элементами 4-6 сравнения. Датчики 7 и 8 скорости вращения колесных пар электровоза соединены с другими входами элементов 5 и 6 сравнения, а их выходы подключены через блок 9 выделения максимального и минимального сигнала и интегратор 10 к управляемому приводу 11. Второй вход элемента 6 сравнения соединен с задатчиком 12 скорости через ключевой элемент 13, а выход - через ключевой элемент 14 с входом фазовращателя 2 (релейного элемента) и выходом ключевого элемента 15, вход которого подключен к выходу элемента И 16, соединенному входами с выпрямителями 17 и 18.
Устройство содержит элемент НЕ 19 и дополнительный элемент НЕ. 20, соединенный выходом с одним из входов дополнительного элемента И 21, а входом с дифференцирующим элементом 22, вход которого подключен к источнику 23 питания привода.
Абсолютная величина ускорения задается задатчиком 1 ускорения и через релейный элемент 2 в положительной или отрицательной полярности подается на интегратор 3, который формирует программу разгона или торможения. Сформированный сигнал мгновенно задаваемой скорости сравнивается в элементах сравнения 4 и 5 с сигналами датчиков 7 и 8 скорости вращения колесных пар. Из двух сигналов рассогласование скоростей блоком 9 выделяется наибольшее, которое поступает на второй интегратор 10. Сигнал интегрирования служит для управления двухдвигательным электроприводом 11 для переключения блока 9 в режим выделения максимального или минимального сигнала скорости.
Сигнал с выхода первого интегратора 3 поступает также в элемент 6 сравнения, в котором он сравнивается с сигналом, пос5 тупающим от задатчика 12 скорости.
Сигнал с первого элемента 6 сравнения (разность от сравнения сигнала мгновенного задаваемой скорости с сигналом уставки скорости) или сигнал с блока 9 выделения максимального и минимального сигнала сигнал максимального рассогласования между мгновенной задаваемой и фактическими скоростями поступают соответственно через ключевой элемент 14 или через ключевой эле5 мент 15 на релейный элемент 2. Коммутацию ключевого элемента 14 через элемент НЕ 19 и ключевого элемента 15 осуществляет элемент И 16, на входы которого через выпрямители 17 и 18 подаются сигналы рассогласования соответствующих скоростей. Ре0 жим ускорения или замедления выбирается устройством согласно полярности сигналов рассогласования скоростей, которая зависит от конкретного состояния системы управления скоростью движения электровоза.
Двухдвигательный привод питается от источника питания, например, аккумуляторной батареи 23 через тиристорный преобразователь 24. Для контроля процесса коммутации, к аккумуляторной батарее 23 подключен дифференцирующий элемент 22, который
0 преобразует пульсирующее напряжение в импульсные сигналы и подает их на вход дополнительного элемента НЕ 20. После того, как емкость аккумуляторной батареи значительно уменьщится и последняя начнет работать в зоне предельного разряда, комму5 тация напряжения (деление напряжения) тиристорным преобразователем прекратится, и на двигатели будет подаваться полное имеющееся на батарее напряжение. В этом случае при разгоне электровоза на входах
дополнительного элемента И 21 присутствуют два сигнала, первый - сигнал рассогласования между сигналом уставки скорости и выходным сигналом первого интегратора (мгновенно задаваемой скорости) и второй - сигнал с выхода дополнительного
элемента НЕ 20. Поскольку выход дополнительного элемента И соединен с управляющим входом дополнительного ключевого элемента 13, то при пропадании коммутации напряжения батареи в режиме разгона
ключевой элемент 13 разрывает цепь от задатчика скорости 12. Это приводит к переключению устройства в режим замедления (задания отрицательного ускорения), которой будет сохраняться до момента появления коммутации напряжения батареи. Следовательно, переключением системы регулятор-электровоз из режима замедления в режим ускорения и обратно устройство управления автоматически, в зависимости от степени рйзряженности, батареи, выбирает ускорение (темп разгона) электровоза.
Таким образом, изменением программы разгона в устройстве управления скоростью движения электровоза осуществляется согласование мгновенно задаваемой скорости и фактической скорости электровоза, которая может быть реализована в условиях ограниченных энергетических возможностей электровоза.
Тем самым обеспечивается повышение надежности управления и защиты от боксования колесных пар электровоза при работе
аккумуляторной батареи в зоне предельного разряда.
Формула изобретения
Устройство для автоматического управления скоростью движения рудничного электровоза по авт. св. № 939309, отличающееся тем, что, с целью повышения надежности, оно снабжено последовательно соединенными дифференцируюш,им элементом, дополнительными элементами НЕ и И, и третьим ключевым элементом, через который первый элемент сравнения соединен с задатчиком скорости, при том вход дифференцирующего элемента подключен к источнику питания
привода, а другой вход дополнительного элемента И соединен с выходом второго выпрямителя, а выход - с управляющим входом третьего ключевого элемента. Источники информации., принятые во внимание при экспертизе
1 Авторское свидетельство по заявке № 2913013/11, кл. В 60 L 1-5/20, 11.04.80.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления скоростью движения рудничного электровоза | 1980 |
|
SU939309A1 |
| Устройство автоматического управления скоростью движения рудничного электровоза | 1979 |
|
SU1004168A1 |
| Устройство автоматического управления скоростью движения рудничного электровоза | 1977 |
|
SU929473A1 |
| Устройство для управления многодвигательным электроприводом транспортного средства | 1984 |
|
SU1411175A1 |
| Устройство для автоматического управления электровозом | 1986 |
|
SU1402449A1 |
| Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 1981 |
|
SU1068305A1 |
| Устройство для определения скольжения колесной пары транспортного средства | 1981 |
|
SU990555A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРИВОДНОГО И/ИЛИ ТОРМОЗНОГО УСИЛИЯ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ПОДВИЖНОГО СОСТАВА БЕЗ СВОБОДНЫХ ОСЕЙ В ОБЛАСТИ ГРАНИЧНОГО СЦЕПЛЕНИЯ КОЛЕС С РЕЛЬСАМИ | 1995 |
|
RU2105679C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| Устройство защиты от боксования и юза | 1986 |
|
SU1411172A1 |
