Изобретение относится к технике закалки длинномерных изделий, например труб, валов; переменных сечений, в баке с жидкостью и может быть использовано в металлургической промьшленности.
По основному авт. св. 749918 известно устройство, в котором с целью получения необходимой степени закалки по высоте закаливаемого изделия, имеющего переменную конусность, использованы импульсный датчик перемещения, программный блок частоты, реверсивный счетчик и счетчик импульсов. Один из входов реверсивного счетчика через импульсный датчик перемещения соединен с выходом подъемного устройства, а второй вход этого счетчика через программный блок частоты соединен с выходом счетчика импульсов. На вход счётчика импульсов поступают сигналы с импульсного датчика перемещения. Шлход реверсивного счетчика через регулятор скорости соединен с входом подъемного устройства til.
В системе переход с одной скорости извлечения на другую происходит с достаточно большим перерегулированием, и особенно неточен в диапазоне низких скоростей, в связи с тем, что информация с импульсного датчика перемещения на низких скоростях , поступает редко. Диапазой низких скоростей извлечения наиболее применим в устройствах програймной закалки. Установившийся режим сопровождается колебаниями скорости около заданного значения с достаточно боль10шой амплитудой.В результате извлекаемое изделие движется рывками.Все этоприводит к тому,что определенные сечения охлаждаются неравномерно и качество закалки понижается.
15
Целью изобретения является повышение точности поддержания заданного режима закалки длинномерных, изделий и улучшение качества закалки,
Эта цель достигается, тем, что
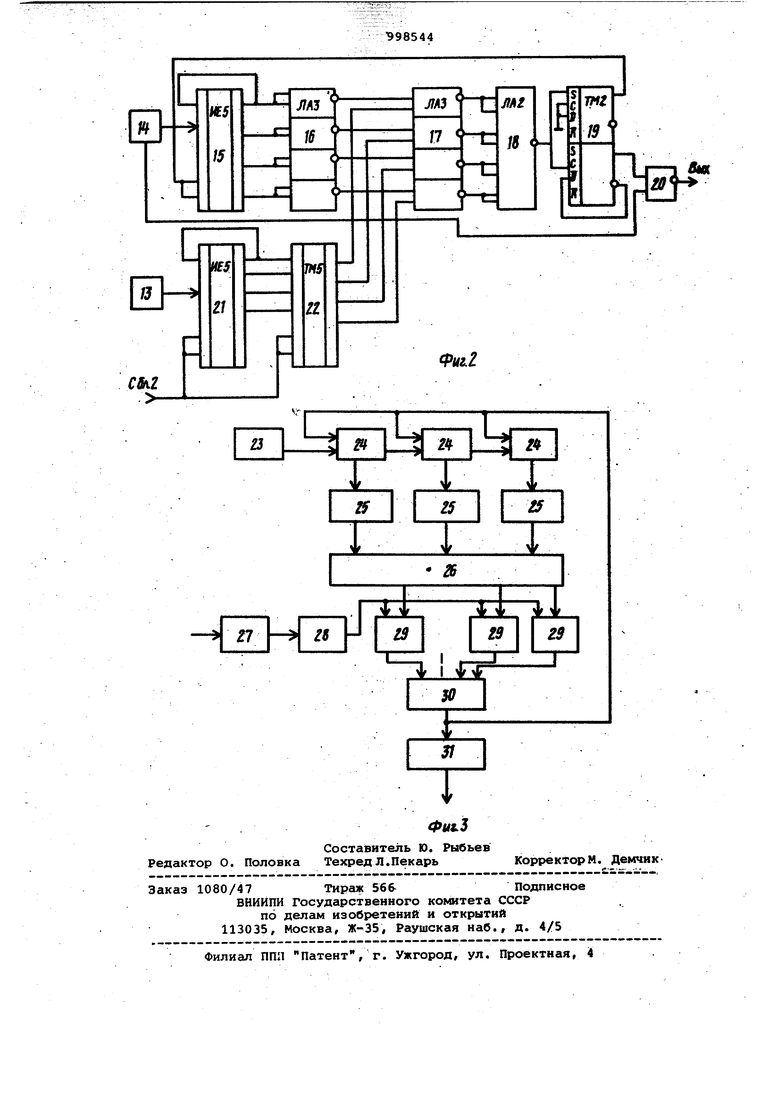
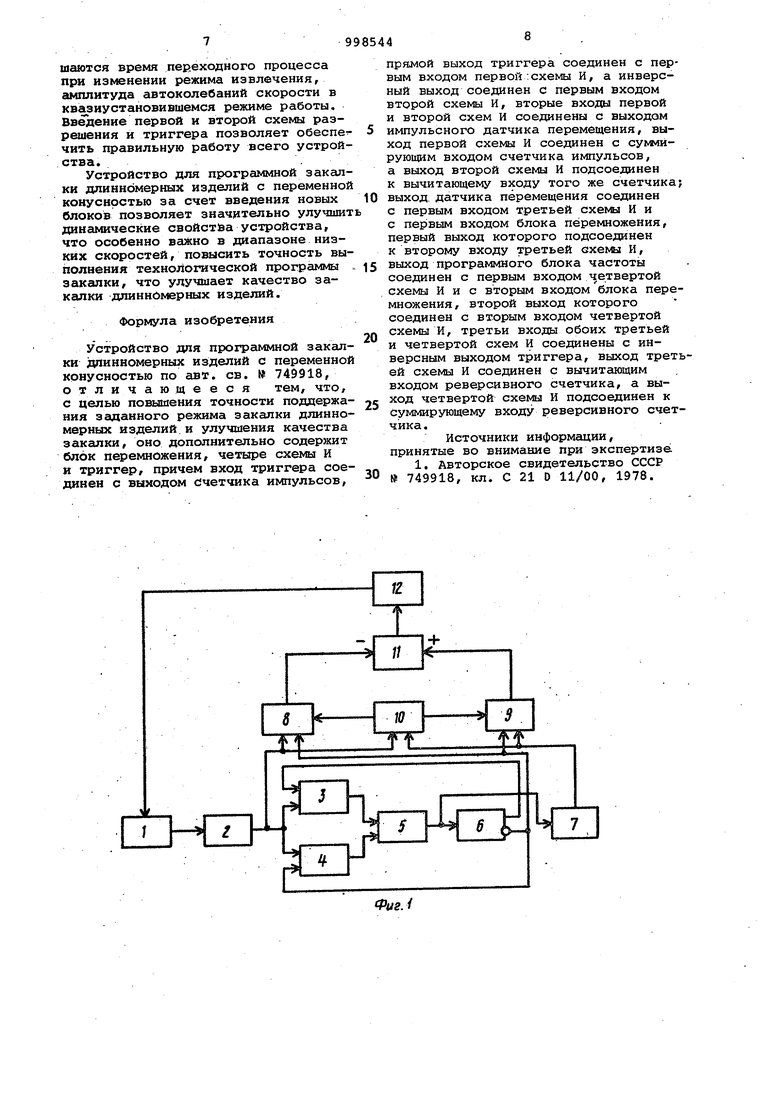
20; устройство дополнительно содержит блок перемножения, четыре схемы И и триггер, причем вход триггера соединен с выходом счетчика импульсов, прямой выход триггера соединен с пер25BbiM входом первой схемы И, а инверсный выход соедщнен с первым входом второй схемы И, вторые входы первой и второй схем И соединены с выходом импульсного датчика перемещеЕШЯ, вы30. ход первой схемы И соединен с суммирующим входом счетчика импульсов, а. выход второй схемы И подсоединен к вычитающему входу того же счетчик выход датчика перемещения соединен с первым входом третьей схемы И и с первым входом блока перемножения, первый выход которого подсоединен к второму входу третьей схемы И, выхо программного блока частоты соединен с первым входом четвертой схемы И и с вторым входом блока перемножения, второй выход которого соединен с вторым входом четвертой схемы И, тре тьи входы обоих третьей и четвертой схем И соединены с инверсным выходом триггера, выход третьей схемы И сое динен с вычитающим входом реверсивного счетчика, а выход четвертой схемы И подсоединен к суммирующему входу реверсивного счетчика. На фиг, 1 приведена блок-схема устройства для программной закалки длинномерных изделий с переменной конусностью; на фиг. 2 - принципиальная схема одной схемы преобразования блока умножения; на фиг. 3 структурная схема программного блока частоты. Устройство для программной закал ки длинномерных изделий с переменно конусностью содержит подъемный ме-. ханизм 1, импульсный датчик 2 перемещё ия, первую 3 и вторую 4 схемы счетчик 5 импульсов, триггер 6, про граммный блок 7 частоты, третью 8 и четаертую 9 схемы И, блок 10 умножения, реверсивный счетчик 11, ре гулятор 12 скорости. Импульсный датчик 2 перемещения может:быть индуктивным, работающим на срыве генерации при прохождении над магнитной системой датчика зуб ев зубчатого колеса, связанного с валом двигателя подъемного механизма 1. Счетчики 5, и 11 реверсивные, спо собные работать как в режиме суммирования, так и в режиме вычитания, выполненные, например, на микросхемах К155ИЕ6 и логике К155ЛАЗ. Регулятор 12 скорости состоит из нескольких тиристорннх коммутаторов, переключаемых по сигналам ревер сивного счетчика 11. При включении каждого из KoivnviyTaTopoB шунтируется га или иная часть сопротивления, включенного в рс торную цепь двигателя. В зависимости от комбинации на выходе счетчика 11 включается определенный коммутатор и устанавливается определенная скорость извлечения Блок 10 умножения представляет собой две схемы преобразования импульсов с равномерным шагом с датчика перемещения и программного блока частоты, с последующим выделением числа импульсов- за фиксированный промежуток времени. Схема выполнена, например, на микросхемах серии К155 и содержит генераторы 13 и 14 (общие для обеих схем преобразования блока умножения) счетчик 15 и схемы 16-18 совпадения, формирователь 19, схема 20 совпадения, счетчик 21, регистр 22. Устройство работает следующим образом. Счетчик 21 считает импульсы, приходящие с генератора 13. По импульсу датчика перемещения производится занесение содержимого счетчика 21 в регистр 22 и сброс счетчика 21. Таким образом, число, записанное в регистре 22, определяет длительность паузы между импульсами с датчика перемещения, а частота генератора 13 выбирается такой, чтобы на самой низкой скорости вращения подъемного механизма не происходило переполнение счетчика 21. На выходе регистра 22 число выдается в двоичном коде. Каждый разряд числа поступает на соответствующую схему И схемы 17 совпадения, на вторые входы которой поступают проинвертированные (в схеме 16 совпадения ) соответствующие разряды числа, сосчитанного счетчиком 15 (счетчик 15 считает импульсы генератора 14 ). Чем больше пауза между импульсами датчика перемещения,тем на большее число делится частота генератора 14 и тем меньше частота на выходе формирователя 18. В схеме 20 совпадения происходит выделение посылки импульсов за промежуток времени at(ut „ .:-,где f частота импульсов генератора 14 ). Аналогично работает и вторая схема преобразования блока умножения, где управление регистром и счетчиком 21 производится импульсами программного блока частоты. Далее импульсы с первого выхода блока умножения суммируются с импульсами датчика перемещения и при напи чии сигнала разрешения поступают на вычитаюцщй вход реверсивного счетчика 11, а со второго выхода блока умножения суммируются с импульсами программного блока частоты и поступают на суммирующий вход реверсивного счетчика. Введение блока умножения позволяет значительно улучшить динамические свойства устройства, особенно и диапазоне низких скоростей, повысить частоту переключения тиристоров в егуляторе скорости и уменьшить амплитуду автоколебаний скорости враения подъемного механизма. Все это риводит к более точному выполнению ехнологического режима закалки и лучшению качества закалки изделий. программный блок 7 частоты (фиг. 3 ) - делитель частоты с регули руемой частотой деления - состоит из генератора 23,-системы 24 счетчиков, дешифраторов 25, коммутатора 26 счетчика 27 участков, дешифратора 28 участков, схем 29 совпадения, схемы 30 суммирования, триггера 31. В коммутаторе 26 и схемах 29 совпадения набираются коэффициенты, на которые должна делиться частота генератора 23. Выходная частота с триггера 31 соответствует частоте задания программного блока частоты. Импульсы со Ъчетчика 5 импульсов устройства дпя программной закалки поступают в программном блоке частоты на счетчик 27 участков. При приходе первого импульса появляется еди ничный уровень на первом выходе дешифратора 28 и открывается первая схема 29 совпадения, а все остальные схемы совпадения заперты. С приходом второго импульса со счетчика 5 в счетчик 27 участков появляется единичный уровень на втором выходе дешифратора 28 и открывается вторая схема 29 совпадения, а остальные закрыты. И частота ге.нератора 23 будет делиться на число, записанное в схеме 29 и т.д. Устройство дпя программной закалки длинномерных изделий с переменной конусностью работает следующим образом. Изделие перед закалкой устанавливается на некоторый заранее определенный уровень над закалочным батком и включается питание всей системы. При этом триггер б устанавливается в 1, открывая первую схему И 3 и закрывая вторую схему И 4, в связи с этим запрещена работа третьей и четвертой схем И 8 и 9, а значит и реверсивного счетчика 11 и ре гулятора 12. Затем изделие опускается подъемным устройством 1 в бак с жидкостью Сигналы с импульсного датчика 2 перемещения поступают через схему И 3 на суммкрукшулк вход счетчика 5 импульсов. Полное погружение изделия бак фиксируется по количеству импул сов, которые сосчитал счетчик 5. Дл изделий разной длины это разное чис ло. Счетчик 5 реверсивный и содержи определенное количество схем совпадения {схемы И ) , на входах которых набираются числа, соответствующие технологической программе (определя ют место скачкообразного изменения конусности, т.е. длину участка длин номерного изделия с постоянной конусностью, сумма длин всех участков равна длине изделия ). При наборе сче чиком 5 числа, соответствующего пол ной длине изделия, срабатывает соот ветствующая схема совпадения и переключается триггер 6. Подается уровень запрета на схему И 3 и уровень разрешения на схему И 4. Счетчик 5 переключается на режим вычитания и разрешается работа схем 8и 9. По этому же сигналу оператор останавливает подъемный механизм и далее управление подъемным механизмом производщтся автома гически. Сигнсш со счетчика .5 поступаети на программный блок 7 частоты, который задает определенную .частоту задания на один из входов схемы ИЗ, эта же частота задания преобразуется в блоке 10 умножения и поступает на втдрой вход схемы 9. Суммарный сигнал со второго выхода схемы 9 поступает на суммирующий вход реверсивного счетчика 11, при этом с выхода счетчика 11 сигнал поступает на вход регулятора 12 скорости и двигатель подъемного механизма 1 начинает разгоняться, поднимая изделие. Сигнал с датчика 2 поступает через схему 4 на вычитающий вход счетчика 5, а также на один из входов первого сумматора 8 и на первый вход блока 10 умножения. С выхода В импульсы поступают на вьтчитгиощий вход реверсивного счетчика 11. Таким образом, в реверсивном счетчике имеется первая и вторая разности двух сигналов (текущего и задания). На выходе реверсивного счетчика 11 имеется число, которое поступает на вход регулятора 12 скорости и устанавливается некоторая определенная скорость вытяжки. Счетчик 5 импульсов выдает сигналы при определенном наборе чисел (что соответствует местам скачкообразного изменения конусности). При вычитании импульсов в счетчике 5 набирается второе определенное число, выдается сигнал на программный блок 7 частоты и меняется суммарный сигнал на выходе блока 9 и суммирующем входе счетчика 11. В результате меняются выходной сигнал счетчика 11, поступающий на регулятор, и скорость вытяжки. При изменении текущей скорости изменяется сигнал с датчика 2 и суммарный сигнал на выходе схемы В и далее на вычитающем входе счетчика 11. На выходе счетчика 11 устанавливается число, определяющее новую скорость вытяжки. Включение блока перемножения и первого и второго сумматоров позволяет увеличить количество информации, получаемой с датчика перемещения, что особенно важно в диапазоне низких скоростей. Это влечет за собой увеличение быстродействия системы ft точности поддержания технологического режима закалки, так как уменьшаются время переходного процесса при изменении режима извлечения, гмплитуда автоколебаний скорости в квазиустановившемся режиме работы. Введение первой и второй схемы разрешения и триггера позволяет обеспа чить правильную работу всего устрой ства. Устройство для программной закал ки длинномерных изделий с переменно конусностью за счет введения новых блоков позволяет значительно улучши динамические свойст&а устройства, что особенно важно в диапазоне низких скоростей, повысить точность вы полнения технололэдческой программы закалки, что улучшает качество закгшки длинномерных изделий. Формула изобретения Устройство для программной закалки длинномерных изделий с переменной конусностью по авт. св. № 749918, отличающееся тем, что, с целью повышения точности поддержания заданного режима закалки длинномерных изделий и улучшения качества закалки, оно дополнительно содержит блок перемножения, четыре схеквл И и триггер, причем вход триггера соединен с выходом счетчика импульсов. прямой выход триггера соединен с первым входом первой:схемы И, а инверсный выход соединен с первым входом второй схемы И, вторые входы первой и второй схем и соединены с выходом импульсного датчика перемещения, выход первой схемы И соединен с сукмирующим входом счетчика импульсов, а выход второй схемы И подсоединен к вычитающему входу того же счетчика; выход датчика перемещения соединен с первым входом третьей схемы И и с первым входом блока перемножения, первый выход которого подсоединен к второму входу третьей схемы И, выход программного блока частоты соединен с первым входом четвертой схемы И и с вторым входом блока перемножения, второй выход которого соединен с вторым входом четвертой схемы И, третьи входы обоих третьей и четвертой схем И соединены с инверсным выходом триггера, выход третьей схемы И соединен с вычитающим входом реверсивного счетчика, а выход четвертой схемы И подсоединен к суммирующему входу реверсивного счетчика. Источники информации, принятые во внимание при экспертизе. 1. Авторское свидетельство СССР № 749918, кл. С 21 О 11/00, 1978.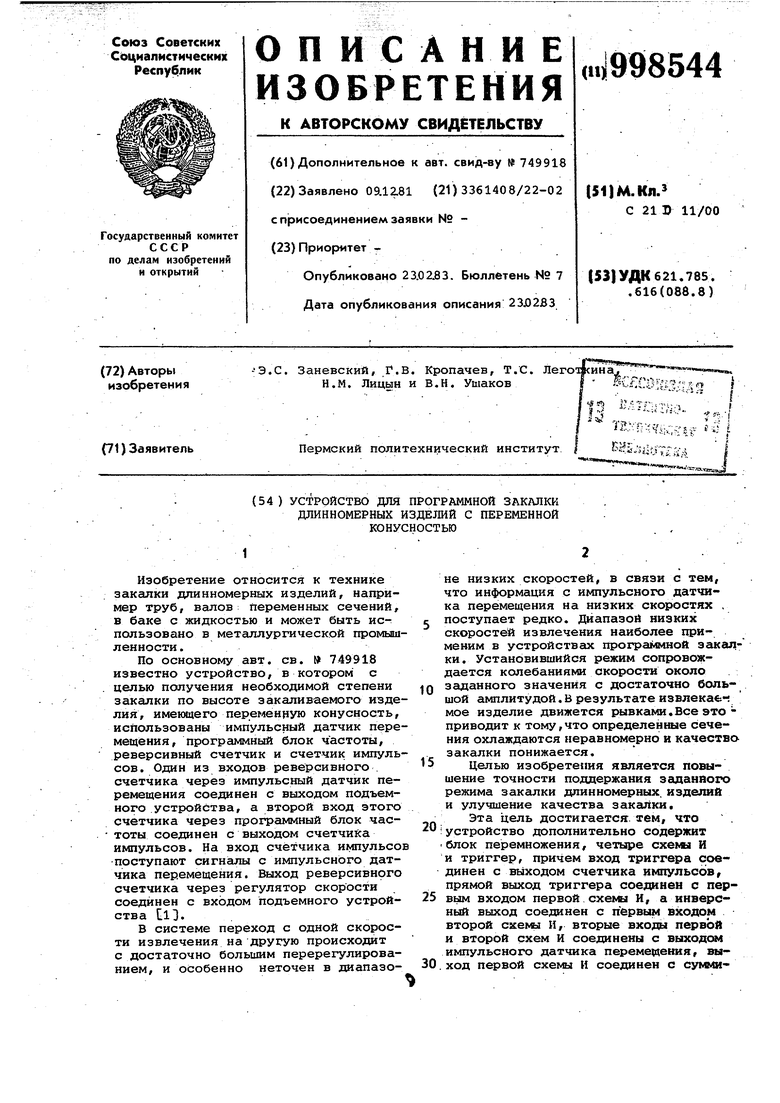
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программной закалки длинномерных изделий с переменной конусностью | 1982 |
|
SU1036772A1 |
| Устройство для программной закалки длинномерных изделий | 1982 |
|
SU1016385A1 |
| Устройство для программной закалки длинномерных изделий | 1982 |
|
SU1059012A1 |
| Устройство для программной закалки длинномерного изделия | 1985 |
|
SU1258854A1 |
| Устройство для программной закалки длинномерных изделий | 1982 |
|
SU1052554A1 |
| Система для программной закалки длинномерных изделий | 1984 |
|
SU1186669A1 |
| Устройство для программной закалки длинномерных изделий с переменной конусностью | 1978 |
|
SU749918A1 |
| Система для программной закалки длинномерных изделий | 1986 |
|
SU1382864A1 |
| Устройство программной закалки длинномерных изделий | 1980 |
|
SU865942A1 |
| Устройтво для программной закалки длинномерных изделий с переменной конусностью | 1976 |
|
SU585226A1 |