Изобретение относится к управлению транспортными средствами, а именно к управлению транспортными средствами в условиях заноса. Известно устройство, регистрирую щее отклонение автомобиля от заданного направления движения Cl3Недостатком указанного устройств является его низкая точность, так как фактическая величина заноса остается неизвестной. Наиболее близким к изобретению является устройство для определения параметров движения транспортного средства ,2. Известное устройство индицирует возникновение заноса по появлению ускорения транспортного средства, т только при прямолинейном движении транспортного средства, что сужает функциональные возможности устройст ва. В то время как возникновение заноса наиболее вероятно при движении транспортного средства по криво линейной траектории, то постоянно действующие на транспортное qpeдcтв движущееся по криволинейной траекто рии, ускорения при этом не могут быть приняты в качестве признака по явления заноса. Как известно, при движени: без заноса транспортного средства по криволинейной траектории на транспортное средство воздейству-,ют ускорения, величина которых зависит как от радиуса кривизны траектории, так и от линейной скорости движения транспортного средства. Таким образом, возникновение заноса при движении транспортного средства по криволинейной траектории не может быть зарегистрировано по появлению ; ускорения транспортного средства. Целью изобретения является расширение функциональных возможностей устройства за счет определения сме щения транспортного средства, движущегося по криволинейной траектории. Поставленная цель достигается тем, что в устройство, содержащее датчик угла поворота управляющих колес, сумматор, выход которого под, ключей к входу блока индикации, датчик ускорения, введены датчик линейной скорости, квадратор и делитель, причем выход датчика линейной скорости подклвдчеи к входу квадратора, выход которого подключен к первому входу делителя, выход которого подключен к первому входу сумматора, второй вход делителя подключен к вы-:
ходу датчика ускорения, выход датчика угла поворота управляющих колес подключен к второму входу сумматора.
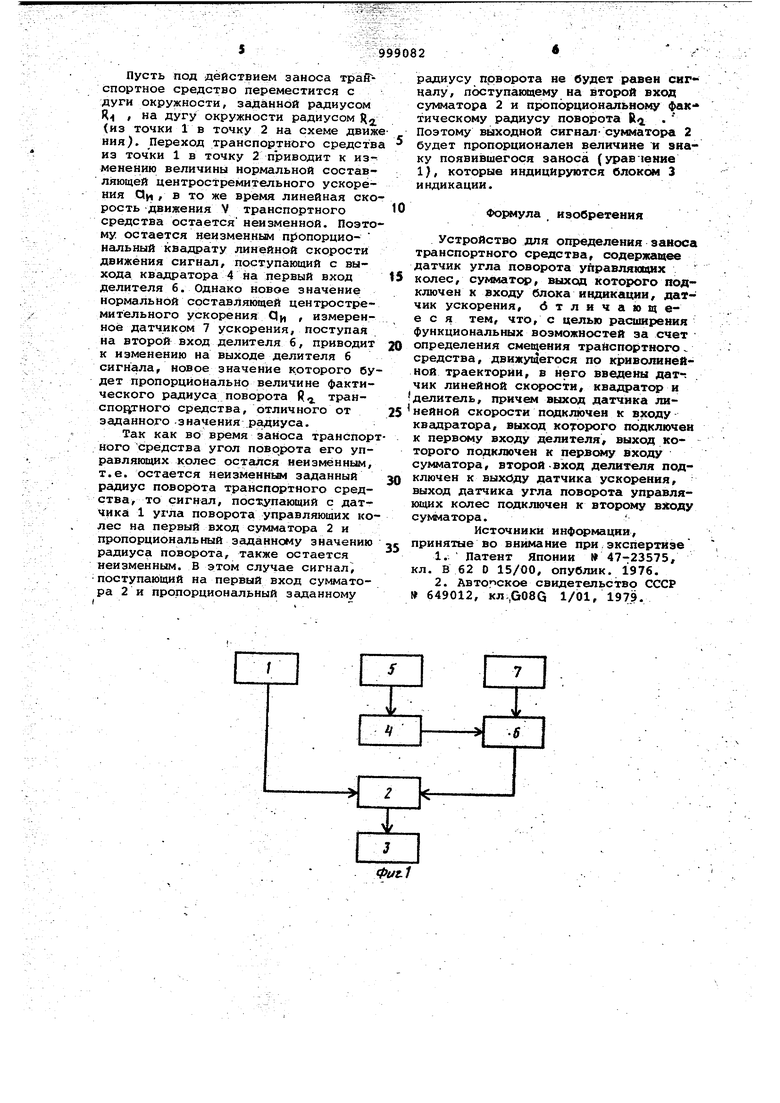
На фиг. 1 представлена структурная схема устройства; на фиг. 2 расчетная схема движения транспортного средства в условиях заноса.
Устройство содержит датчик 1 угла поворота управляющих колес, соединенный с первым входом сумматора 2, выход которого соединен с блоком
3индикации, -и квадратор 4, вход которого соединен с датчиком 5 линейной .скорости, а выход - с первым входом делителя б, второй вход которого соединен с датчиком- 7 ускорения, а выход - С вторым входом сумматора 2.
Датчик 1 угла поворота управляющих колес предназначен для измерения заданного значения радиуса поворота транспортного средства. Датчик 5 линейной скорости предназначен для измерения линейной скорости движения транспортного средства. Датчик 7 ускорения предназначен для ..змерения нормальной составляющей центростремительного ускорения. Квадратор 4 предназначен для возведения в квадрат значения линейной скорости движения транспортного средства, поступающей на его вход с датчика 5 линейной скорости.Делитель 6 по сигналам, поступающим на его вход с квадратора
4и датчика 7 ускорения, осуществляет деление квадрата линейной скорости движения транспортного средства на величину нормальной составляющей центростремительнооо ускорения.
Сумматор 2 по сигналам, поступающим на его соответствующие входы с датчика 1 угла поворота управляющих колес и делителя б и пропорциональным соответственно заданному и фактическому рещиусам поворота транспортного средства, определяет величину и знак заноса.
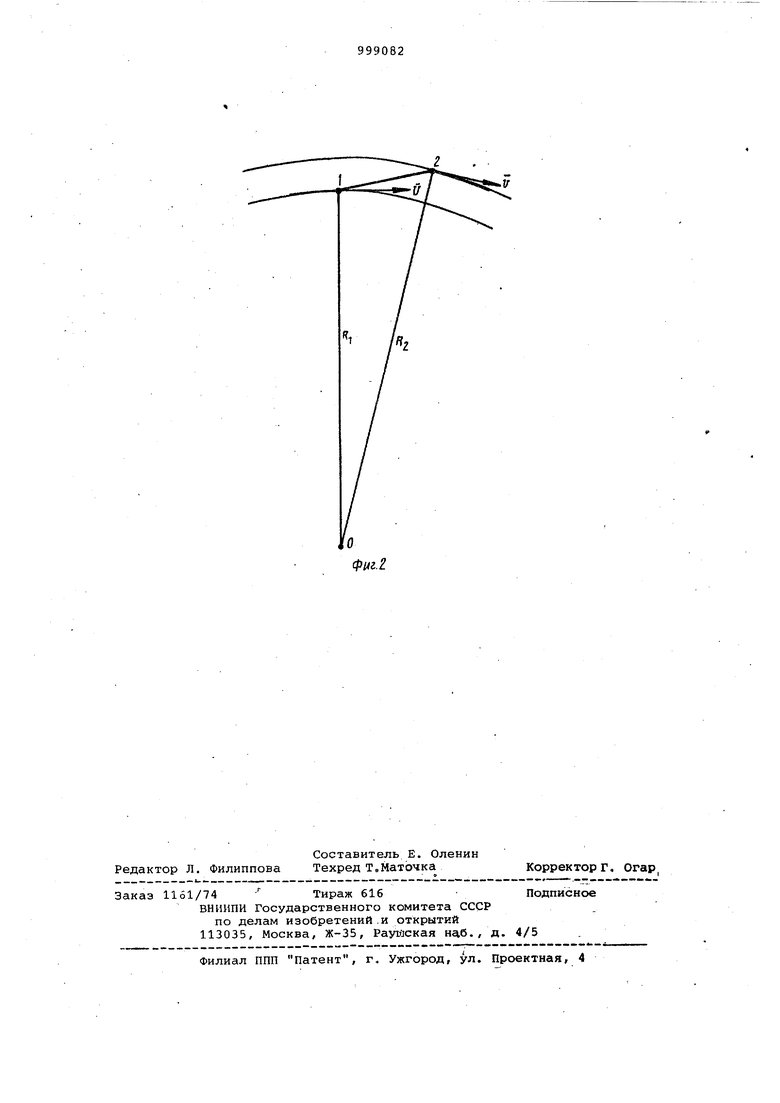
В расчетной схеме движения транспортного средства в условиях заноса (фиг. 2), принять следующие обознчения :
О - точка оси поворота транспортного средства;
заданный радиус noBqpoTa
транспортного средства; фактический радиус поворота
транспортного средства; V - вектор линейной скорости движения транспортного средства На фиг. 2 показано положение транспортного средства до. заноса (точка 1) и после -выноса (точка 2).
Как видно -3 схемы движения, величина заноса может быть найдена в виде изменения радиуса поворота транспортного средства, т.е.
:..-(I).
где. S- величина заноса.
Известно, что движение транспортногр средства- на криволинейномучастке описывается уравнением
R Qr.
(2)
где R - радиус поворота транспортного средства; V - линейная скорость движения
транспортного средства; Qy,- нормальная составляющая
центростремительного ускорения.
Таким образом, величина заноса с учетом уравнений (1) и (2) определяется выражением
Т.-«(3)
Пример. Пустьтранспортному средству поворотом управлякядих колес задано движение с линейной скоростью V по дуге окружности радиусом R фиг. 2). Заданное значение радиуса поворота R-i транспортного средства с датчика 1 угла поворота управляющих колес поступает на первый вход сумматора 2 (фиг. 1). Измеренное дачиком 5 линейной скорости значение линейной скорости V движения транспортного средства поступает на вход квадратора 4, который возводит в квадрат это значение линейной скорости и подает его на первый вход делителя 6.
Измеренное датчиком 7 ускорения значение нормальной составляющей центростремительного ускорения С|у поступает на второй вход делителя б, который в соответствии с уравнением (2) производит деление квадрата линейной скорости на величину нормальной составляющей центростремительного ускорения и на своем выходе формирует сигнал, пропорциональный радиусу поворота R транспортного средства.
При движении транспортного средства без заноса на выходе делителя б формируется сигнал, пропорциональный величине заданного значения радиуса поворота R , так как фактическое значение радиуса поворота R. равно его заданному значению R . В этом случае сигнал, поступающий на первый вход сумматора 2 и пропорциональный заданному радиусу пово-, рота R , равен сигналу поступающему на второй вход сумматора 2 и пропо|5циональному фактическому радиусу поворота. Поэтому выходной сигнал сумматора 2f пропорциональный величине и знаку заноса, вследствие отсутствия заноса, равен нулю, что и будет индицироваться блоком индикации.
Пусть под действием заноса трай спортное средство переместится с дуги окружности, заданной ргщиусом R , на дугу окружности радиусом у (из точки 1 в точку 2 на схеме движния. Переход транспортного средств из точки 1 в точку 2 приводит к изменению величины нормальной составляющей центростремительного ускорения OH г в то же время линейная скорость движения V транспортного средства остается неизменной. Поэто му остается неизменным njionopuHOнальный квадрату линейной скорости движения сигнал, поступающий с выхода квадратора 4 на первый вход делителя 6. Однако новое значение нормальной составляницей центростремительного ускорения QH , измеренное датчиком 7 ускорения, поступая на второй вход делителя 6, приводит к изменению на выходе делителя 6 сигнала, новое значение которого будет пропорционально величине фактического радиуса поворота й транспорцтного средства, отличного от заданного значения радиуса.
Так как во время заноса транспорного Средства угол поворота его управляющих колес остался неизменным, т.е. остается неизменным заданный радиус поворота транспортного средства, то сигнал, поступающий с датчика 1 угла поворота управляющих колес на первый вход сумматора 2 и пропорциональный заданному значению радиуса поворота, также остается неизменным. В этом случае сигнал, поступающий на первый вход сумматора 2 и пропорциональный заданному
радиусу прворота не будет равен сигналу, поступающему на второй вход сумматора 2 и пропорциональному фактическому радиусу поворота Rrj Позтому выходной сигнал- сумматора 2 будет пропорционгшен величине и энаку появи ашегося заноса (уравчение 1), которые индицируются блоком 3 индикации.
Формула изобретения
Устройство для определения заноса транспортного средства, содержащее датчик угла поворота управлякхцих колес, сумматор, выход которого подключен к входу блока индикации, дат чик ускорения, бтличающее с я тем, что, с целью расширения функциональных возможностей за счет определения смещения трайспортного. средства, движущегося по криволинейной траектории, в него введены дат-. чик линейной скорости, квадратор и делитель, причем выход датчика ли5 нейной скорости подключен к входу квадратора, выход которого подключен к первому входу делителя, выход которого подключен к первому входу сумматора, второй-вход делителя подключен к выходу датчика ускорения, выход датчика угла поворота управляющих колес подключен к второму входу сукматора.
Источники информации, принятые во внимание при экспертизе
1.Патент Японии №47-23575/ кл. В 62 D 15/00, опублик. 1976.
2.Автог ское свидетельство СССР 649012, кл.ООве 1/01, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости движения транспортного средства | 1983 |
|
SU1117679A1 |
| Устройство для регулирования скорости движения транспортного средства | 1980 |
|
SU886036A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1981 |
|
SU959142A1 |
| Тренажер буровика | 1984 |
|
SU1213495A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1982 |
|
SU1056257A1 |
| СПОСОБ ДИНАМИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ СВЕТОВОГО ПУЧКА ФАР ТРАНСПОРТНЫХ СРЕДСТВ В ПРОЦЕССЕ ВЫПОЛНЕНИЯ ПОВОРОТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2314216C2 |
| Тренажер буровика | 1982 |
|
SU1062760A1 |
| Колесный датчик линейной скорости наземного транспортного средства | 2019 |
|
RU2719238C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ БЫСТРОГО ДВИЖЕНИЯ АВТОМОБИЛЯ | 1996 |
|
RU2110417C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРА, ХАРАКТЕРИЗУЮЩЕГО СОСТОЯНИЕ СИСТЕМЫ КОЛЕСО - РЕЛЬС, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2061610C1 |