Изобретение относится к измерительной технике, в частности к измерителям линейной скорости, работающим на основе измерений акселерометров, и может быть использовано для измерения линейной скорости движения наземных транспортных средств.
Известен датчик линейной скорости (Плохоцкий, М.А. Машины и механизмы для путевого хозяйства. М.: Изд-во «Транспорт», – 1970 г. с. 260-261), который построен на измерении угловой скорости вращения колесной пары и который состоит тахогенератора, кинематически через редуктор соединенного с осью колесной пары.
Недостатком этого устройства является излишняя громоздкость, наличие редуктора и пониженная точность измерения скорости.
Известно устройство измерения линейной скорости подвижного объекта на основании измерения ускорений с последующим интегрированием, (Матвеев В.В., Распопов В.Я. Основы построения бесплатформенных инерциальных навигационных систем. СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ Электроприбор», 2009, стр. 20), взятое в качестве прототипа. Устройство состоит из двух акселерометров с взаимно перпендикулярными осями чувствительности и закрепленными жестко на подвижном объекте, которые подключены к блоку пересчета (микроконтроллеру), выход которого соединен с двумя последовательно соединенными интеграторами. Данная бесплатформенная инерциальная навигационная система относится к классу сложных навигационных систем и формирует много параметров движения кроме скоростей.
Однако в силу наличия операции интегрирования данная система будет иметь нарастающую со временем погрешность и для ее нормальной работы требуется периодическая коррекция.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в повышении точности измерения линейной скорости наземного транспортного средства за счет осреднения сигналов акселерометров посредством соответствующего их включения и исключения операции интегрирования в алгоритме определения скорости.
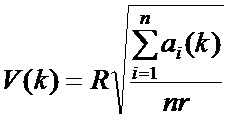
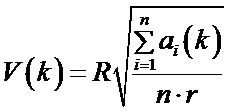
Технический результат достигается тем, что в колесном датчике линейной скорости наземного транспортного средства, содержащем акселерометры, жестко закрепленные на транспортном средстве, и микроконтроллер, новым является то, что акселерометры жестко закреплены на колесе транспортного средства и равномерно расположены по окружности с радиусом, определяемым используемыми акселерометрами, с осями чувствительности, ориентированными перпендикулярно к оси вращения колеса, при этом диаметрально расположенные акселерометры подключены к соответствующим входам сумматоров, выходы которых соединены с соответствующими входами преобразователей аналог-код, выходы которых подключены к соответствующим портам микроконтроллера, в котором линейная скорость определяется согласно формуле
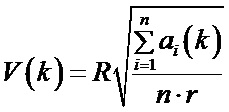
где 





при этом выходной порт микроконтроллера соединен с входом устройства беспроводной передачи информации, являющимся выходом колесного датчика линейной скорости транспортного средства.
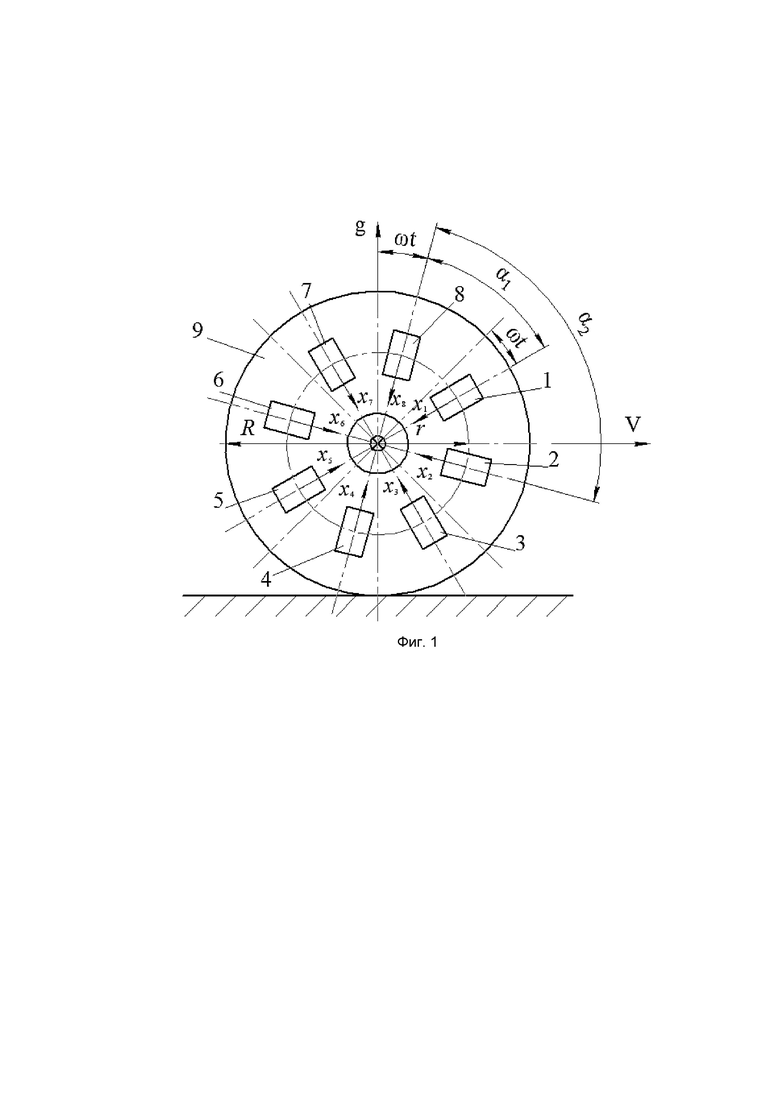
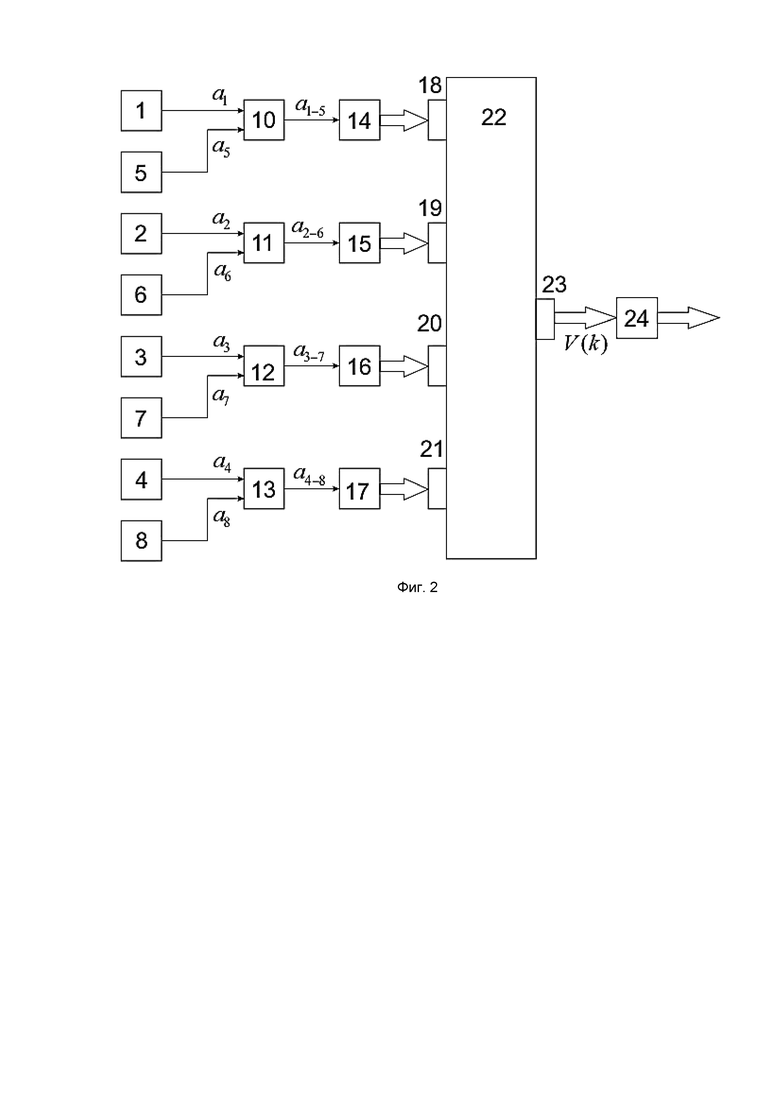
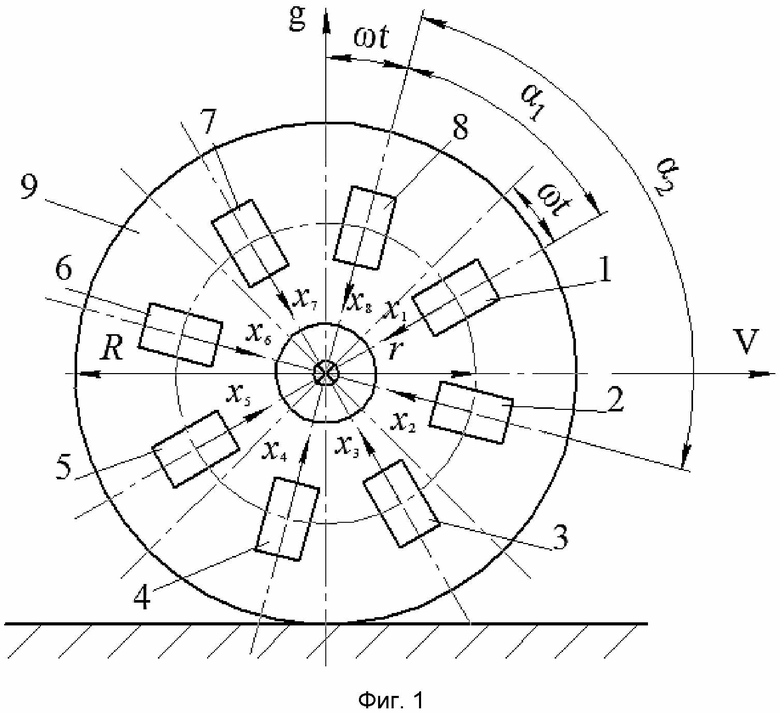
Сущность изобретения поясняется на фиг.1 и фиг.2, где фиг.1 – схема расположения акселерометров на колесе в текущий момент времени, фиг.2 – структурная схема колесного датчика линейной скорости. Здесь:
1 – 8 – акселерометры (для примера показано 8 акселерометров);
9 – колесо транспортного средства;
10 – 13 – сумматоры;
14 – 17 – преобразователи аналог-код (АЦП);
18 – 21 – входные порты микроконтроллера;
22 – микроконтроллер;
23– выходной порт микроконтроллера;
24 – устройство беспроводной передачи информации (Bluetooth);








Колесный датчик линейной скорости включает в себя 
При движении транспортного средства с линейной скоростью V, колесо 9 вращается с угловой скоростью 

Для исключения влияния ускорения силы тяжести оси чувствительности акселерометров ориентированы перпендикулярно оси вращения колеса и сигналы диаметрально расположенных акселерометров суммируются. Рассмотрим для примера формирование сигнала с акселерометров 1 и 5 на сумматоре 10

Аналогично будет формироваться сумма для двух любых диаметрально расположенных акселерометров
Полученные суммы сигналов с сумматоров 10-13 поступают на входы преобразователей аналог-код 14-17 и далее через входные порты 18-21 в микроконтроллер 22, в котором из уравнения
определяется линейная скорость 
Вычисленная в микроконтроллере 22 линейная скорость транспортного средства через выходной порт 23 с помощью беспроводного устройства передачи информации (например, Bluetooth) 24 передается потребителям.
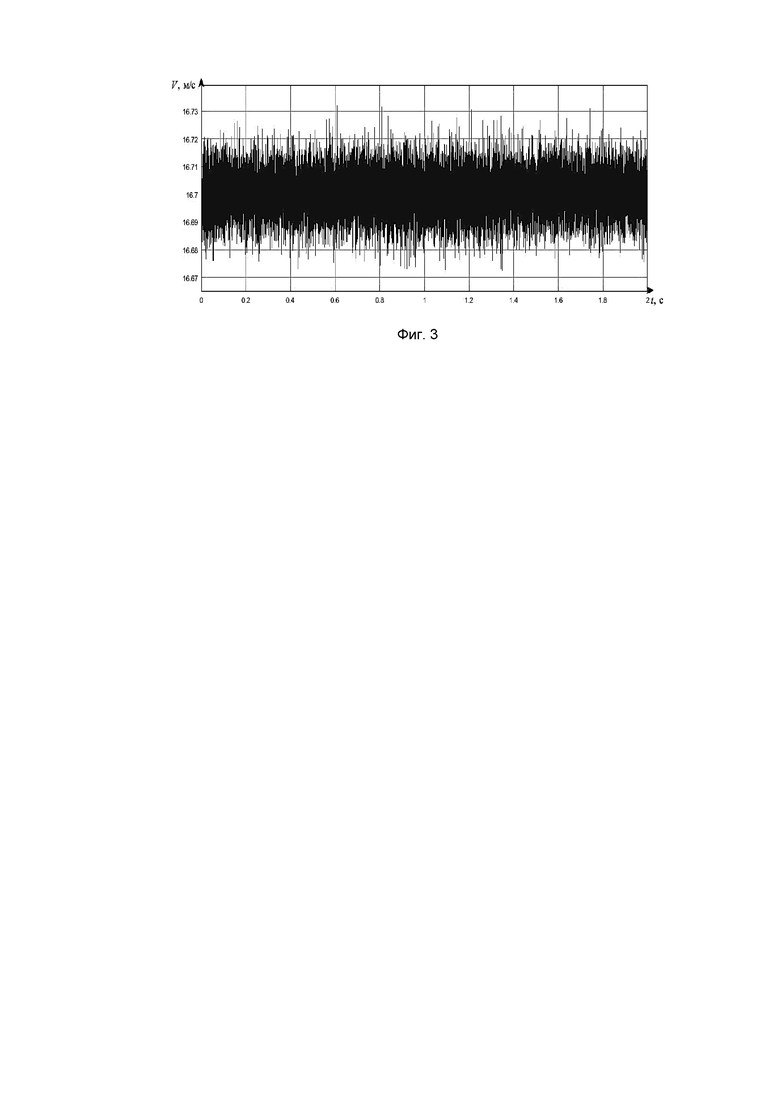
Работа колесного датчика линейной скорости была апробирована на примере движения железнодорожного путеизмерителя с помощью компьютерной модели, выполненной в Simulink прикладного пакета MatLab. Для модели использовались следующие характеристики:
Скорость путеизмерителя: V=60км/час=16,7 м/с.
Радиус колеса: R=0,475 м.
Радиус установки акселерометров: r=0,3м.
Центростремительное ускорение: 
Шаг опроса по времени: 
Результаты моделирования приведены на фиг.3, где горизонтальной осью является время t, с; а вертикальной осью – линейная скорость путеизмерителя V, м/с.
По приведенному графику видно, что смоделированная скорость имеет такое же значение, как заданная скорость путеизмерителя (V= 60км/час =16,7 м/с), но с колебаниями этого значения в пределах от -0,0278 до +0,0317 м/с. Эти колебания вызваны неточностью установки акселерометров на колесе и погрешностью работы самих акселерометров, которые были заданы в виде случайных процессов в определенном диапазоне: для первого, второго, пятого и седьмого акселерометров погрешность составляет ±0,1%, для третьего и четвертого – ±0,05%, для шестого и восьмого – ±0,08%. Таким образом, точность колесного датчика линейной скорости будет равна 0,2% или ±0,032 м/с. Погрешность же можно осреднить с помощью апериодических фильтров, включенных, например, на выходах сумматоров.
В рамках апробации разработан эскиз конструкции для железнодорожного колеса, полностью герметичный. Питание от аккумулятора емкостью 6 Ачас (при работе в течение 4-х часов), напряжением ± 15В. Акселерометр АТ1104-50. Разъем для зарядки аккумулятора герметичный. Включение-выключение системы дистанционное, беспроводное.
Таким образом, предложенное изобретение – колесный датчик линейной скорости – технически реализуем и работоспособен, а прошедшая апробацию моделированием работоспособность показывает, что в используемом схемном решении нет накапливаемой со временем погрешности в результате осреднения сигналов акселерометров за счет соответствующего их включения и исключения операции интегрирования в алгоритме определения скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ИНФОРМАЦИИ О ТРАНСПОРТНОМ СРЕДСТВЕ | 2005 |
|
RU2298832C2 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2074829C1 |
| Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости | 2025 |
|
RU2841488C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ КОЛЕИ | 1995 |
|
RU2123445C1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙНОГО ПЕРЕГРЕВА ШИН И ТОРМОЗОВ АВТОМОБИЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2513439C1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
Изобретение относится к измерительной технике, в частности к измерителям линейной скорости, работающим на основе измерений акселерометров, и может быть использовано для измерения линейной скорости движения наземных транспортных средств. На колесе транспортного средства (9) равномерно расположены по окружности заданного радиуса с осями чувствительности, ориентированными перпендикулярно к оси вращения колеса, и жестко закреплены акселерометры (1-8). Диаметрально расположенные акселерометры подключены к соответствующим входам сумматоров (10-13). На выходе сумматоров (10-13) формируется сумма сигналов, исключающая влияние ускорения силы тяжести. Полученные суммы поступают на входы преобразователей аналог-код (14-17) и далее через входные порты (18-21) на микроконтроллер (22). С учетом формирования на каждом шаге k опроса микроконтроллера (23) скорость определяется по формуле 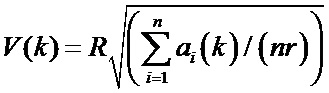
где 





Колесный датчик линейной скорости наземного транспортного средства, содержащий акселерометры, жестко закрепленные на транспортном средстве, и микроконтроллер, отличающийся тем, что акселерометры жестко закреплены на колесе транспортного средства и равномерно расположены по окружности радиусом, определяемым используемыми акселерометрами, с осями чувствительности, ориентированными перпендикулярно к оси вращения колеса, при этом диаметрально расположенные акселерометры подключены к соответствующим входам сумматоров, выходы которых соединены с соответствующими входами преобразователей аналог-код, выходы которых подключены к соответствующим портам микроконтроллера, в котором линейная скорость определяется согласно формуле
где 





при этом выходной порт микроконтроллера соединен с входом устройства беспроводной передачи информации, являющегося выходом колесного датчика линейной скорости наземного транспортного средства.
| Синхронная электрическая машина | 1956 |
|
SU108630A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ОБЪЕКТА | 2006 |
|
RU2307356C1 |
| Установка для непрерывного производства стеклянных труб | 1951 |
|
SU95850A1 |
| JP 11304830 A 05.11.1999 | |||
| JP 2012042271 A 01.03.2012 | |||
| CN 103429992 A 04.12.2013 | |||
| JP 2009262626 A 12.11.2009. | |||

