Изобретение относится К тренажер для обучения пользованием рабочим инструментом и может бытьиспользовано для обучения навыкам управлени буровой уста1новки при проведении спуско-подъемных операций. Известно устройство, содержащее пульт управления лебедкой, ограничитель хода буровой колонны и блоки управления буровой установки iTj . Однако включение такой буровой установки в учебный процесс для при обретения навыков проведения спуско подъемных операций отрицательно вли яет на обучающегося. У обучающихся возникает чувство неуверенности, боязни из-за возможности возникнове НИН аварийной ситуации - выхода из строя буровой установки. Кроме того обучение на реальном техническом объекте - буровой установке приводи к нерациональному использованию высокопроизводительного и дорогостоящего оборудования, так какбуровая установка полностью исключается из производственного цикла. Наиболее близким к изобретению является тренажер, предназначенный для отработки навыков проведения спуско-подъемных операций, содержащее пульт оператора и последователь но включенные блок задания эталонов блок сравнения и блок отображения учебной информации, второй вход которого соединен с выходом блока задания эталонов 2 . Однако формирование с помощью .известного устройства навыков прове дения спуско-подъемных операций про исходит в условиях обучения на реал ном техническом объекте - буровой установке, что вызывает у обучающих ся чувство неуверенности, боязни из-за опасности возникновения аварийной ситуации, поломки. Возникающее при этом напряженное состояние обучающегося снижает активность его работы, что противоречит основному принципу дидактики - принципу сознательности и активносзти. Кроме того, не имеющие непосредственного отношения к отработке сцуско-подъемных операций органы управления и узлы буровой установки отвлекают внимание обучающегося,сни жают наглядность обучения, что приводит к нарушению принципа дидактики - принципа наглядности. Таким об разом, недостатком указанного устро ства являются, его ограниченные дида тические возможности. Целью изобретения является расши ,рение дидактических возможностей тр нажера . Поставленная цель достигается тем, что в тренажер буровика, содер жащий пульт оператора и последовате но включенные блок задания эталонов, блок сравнения и блок отображения учебной информации, второй вход которого соединен с выходом блока за.дания эталонов, введены последовательно включенные блок элементов ИЛИ, сумматор, блок моделирования привода, делитель напряжения и имитатор колебательных движений, выход которого соединен с вторым входом блока сравнения и с третьим входом блока f отображения учебной информации, и функциональный преобразователь,выход которого подключен к второму и третьему входам блока моделирования привода, к второму входу имитатора колебательных движений и к первому входу сумматора, первый, второй,тре-. тий, четвертый и пятый выходы пуль- J та оператора соединены соответствен но с четвертым, пятым и шестым вхо- i дами блока моделирования привода и с вторым и третьим входами блока .элементов ИЛИ. На чертеже представлена структур -, ная схема тренажера. Тренажер содержит пульт 1 оператора и последова;тельно включенные блок 2 задания эталонов, блок 3 сравнения и блок 4 отображения учебной информации, второй вход которого соединен с выходом блока 2 задания эталонов, последовательно включенные блок 5 элементов ИЛИ, сумматор 6, блок 7 моделирования привода, делитель 8 напряжения и имитатор 9 колебательных движений, выход которого соединен со вторым входом блока 3сравнения и третьим входом блока 4отображения учебной информации, и функциональный преобразователь 10, выход которого подключен ко второму и третьему входам блока 7 моделирования привода, ко второму входу имитатора 9 колебательных, движений и к первому входу сумматора 6, первый, второй третий, четвертый и пятый выходы пульта 1 оператора соединены соответственно с четвертым, пятым и шестым входами,блока 7 моделирования привода и со вторым и третьим входами блока элементов ИЛИ. Кран 11 барабана, перекидная ручка 12, маховик 13 контролера,рукоятка 14 ручного тормоза, пневматическая ручка 15 .входят в состав пульта 1 оператора. Сигнал, поступающий на вход датчика 16 с крана 11 барабана, преобразуется в сигнал, пропорциональный перемещению этого крана. Сигнал, поступающий на вход датчика 17 с перекидной ручки 12,преобразуется в сигнал, пропорциональный перемещению этой перекидной ручки. Сигнал, поступающий на вход датчика 18 с рукоятки 14 ручного тормоэа, преобразуется в сигнал,пропорциональный перемещению этой руко ятки ручного тормоза.
Сигнал, поступающий на вход датчика 19 с пневматической ручки 15, преобразуется в сигнал, пропорциональный перемещению этой пневматической ручки.
В качестве датчика 16 крана барабана, датчика 17 перекидной ручки, датчика 18 рукоятки ручного тормоза и датчика 19 пневматической ручки могут быть использованы потенциометрические преобразователи, кинетически соединенные с соответствующим орг-аном ручного управления
Узел 20 моделирования пневмосисTeNEj тормоза по сигналу, поступающему на его вход с датчика 19 пневматической ручки, воспроизводит процессы, аналогичные процессам в реальной пневмосистеме тормоза. Поэтому сигнал на выходе узла 20 моделирования пневмосистемы тор-моза будет соответствовать величи|Не давления воздуха на выходе пнев- мрсистемы тормоза.
Узел 20 моделирования пневмосис темы тормоза может быть реализован , с помощью нелинейного функционального преобразователя.
Датчик 16 крана барабана, датчик 17 перекидной ручки, датчик 18 рукоятки ручного тормоза, датчик 19 пневматической ручки и узел 20 моделирования пневмосистемы тормоза также входят в состав пульта 1 оператора .
Функциональный преобразователь 10 предназначен для преобразования сигнала, соответствующего заданной дЛине буровой колонны, в сигнал, соответствующий весу буровой колонны.
Функциональный преобразователь 10 может быть реализован с помощью потенциометрического преобразователя.
Блок 7 моделирования привода состоит из узла 21 моделирования электродвигателя, узла 22 моделирования редуктора, узла 23 моделирования муфты и узла 24 моделирования барабана.
Узел 21 моделирования электродвигателя по сигналу, поступающему на его первый вход по второму входу блока 7 моделирования привода с функционального преобразователя 10, пропорциональному весу буровой колонны и сигналу, поступающему на его второй вход по четвертому входу блока 7 моделирования привода и первому выходу пульта 1 оператора с маховика 13 контроллера, пропорциональному положению маховика контроллера, воспроизводит процессы, аналогичные процессам в реальном электродвигателе.
-Поэтому сигнал на выходе узла 21 моделирования электродвигателя будет соответствовать скорости вращения выходного вала электродвигателя.
Узел 22 моделирования редуктора по сигналу, поступающему на его первый вход по пятому входу блока 7 моделирования привода и второму выходу пульта 1 оператора с выхода датчика 17 перекидной ручки, пропор0циональному перемещению перекидной ручки и сигналу, поступающему на его второй вход с выхода узла 21 моделирования электродвигателя, пропор-. циональному скорости вращения элек5тродвигателя, воспроизводит процессы, аналогичные процессам в реальном редукторе. Поэтому сигнал на выходе узла. 22 моделирования редуктора будет соответствовать скорости
0 вращения выходного вала редуктора.
В качестве узла 22 моделирования редуктора может быть принят суммирующий усилитель.
Узел 23 моделирования муфты по
5 , поступающему на его первый вход по третьему входу блока 7 моделирования привода с функционального пре(образователя 10 сигналу, пропорциональному весу буровой колонны, по поступающему ка его второй вход по
0 шестому входу блока 7 моделирования привода и третьему выходу пульта 1 оператора с датчика 16 крана бара-, бана сигналу/ пропорциональному перемещению крана барабана, и по пос5тупающему на его третий вход с узла 22 моделирования редуктора сигналу, пропорциональному скорости вращения выходного вала редуктора, воспроизводит процессы, анало0гичные процессам в реальной муфте. ПОЭТОМУ сигнал на выходе узла 23 моделирования муфты будет соответствовать скорости вращения выходного
вала муфты.
5 I
В качестве узла 23 моделирования .муфты может быть принят суммарный усилитель.
0
Узел 24 моделирования барабана по поступающему на его первый вход по первому входу блока 7 моделирования электропривода с сумматора 6 сигналу, пропорциональному величине тормозного усилия и сигналу, поступающему на его второй вход с узла 23 моделирования муфты, воспроизводит процессы, аналогичные процессам в реальном барабане. Поэтому напряжение на выходе узла 24 моделирования барабана будет соответствовать углу поворота барабана.
В качестве узла 24 моделирования барабана может быть принят интегрирующий усилитель.
Делитель 8 напряжения предназначен для воспроизведения коэффициент полиспаста.
Имитатор 9 колебательных движений по поступающему на его второй вход с функционального преобразователя 10 сигналу, соответствующему весу буровой колонны и по поступающему на его первый вход с блока 7 моделирования привода через делител
8напряжения сигналу, соответствующему углу поворота барабана, воспроизводит процессы, аналогичные процессам в реальной талевой системе. Поэтому сигнал на выходе имитатора
9колебательных движений будет соответствовать высоте подъема талевого блока.
Блок 5 элементов ИЛИ предназначен для пропуска.сигналов, идущих с рукоятки 18 ручного тормоза и узла 20 моделирования пневмосистемьз тормоза на сумматор 6.
Последний по поступающему с выхода функционального преобразователя
10сигналу, соответствующемувесу буровой колонны и поступающим через блок.5 элементов ИЛИ с выхода узла 20 моделирования пневмосистемы тормоза сигналу, соответствующем величине давления воздуха на выходе пневмосистеМы, и сигналу с выхода датчика 18 рукоятки ручного тормоза воспроизводит процессы, аналогичные процессам в реальном тормозе.Поэтому сигнал на выходе сумматора 6 будет соответствовать тормозному усилию .
Сумматор 6 может быть реализован с помощью суммирующего усилителя. Блок 2 задания эталонов, выход которого соединен со вторым входом блока 4 отображения учебной информации и первым входом блока 3 сравнения, формирует два сигнала, один из которых соответствует положению ротора - ограничению хода i буровой колонны снизу, а другой положению противозатаскивателя ограничению хода буровой колонны сверху.
Блок 2 задания эталонов может быть реализован с помощью двух однотактных потенциометрических датчиков, один из которых задает напряжение, соответствующее положению ротора, а другой-напряжение, соответствующее положению противозатаскивателя.
Блок 3 сравнения сравнивает сигналы, поступающие на его первый вход с блока 2 задания эталонов, пропорциональные величине задания ограничений хода буровой колонны сверху и снизу, с сигналом,поступающим на его второй вход с имитатора |9 колебательных движений, пропорцио
нальным высоте подъема талевого блока. В момент равенства сигнала, пропорционального высоте подъема талевого блока, с сигнале / пропорциональным величине ограничения хода буровой колонны сверху, что соответствует переподъему буровой колонны,сигнал о возникшей ошибке с выхода блока 3 сравнения поступает на первый вход блока 4 отображения учебной информации, где индицируется с помощью светового табло. Аналогично на световом табло блока 4 отображения учебной информации будет индицироваться ошибка управления в момент равенства сигнаша. пропорционального высоте подъема т алевого блока, с сигналом, nponopiio- : нальным величине ограничения хода буровой колонны снизу.
Блок 3 сравнения может быть реализован с помощью схемы, отрабатывающей характеристику с тремя устойчивыми состояниями.
Блок 4 отображения учебной информации служит для информации обучающегося и инструктора по сигналам, поступающим на его входы: с блока 2 задания эталонов - о положении ротора и противозатаскивателя, ограничениях хода буровой колонны соответственно снизу и сверху/ с блока 3 сравнения - о виде ошибки обучающегося; с имитатора 9 колебательрчх движений - о текущем, положении талевого блока.
Блок 4 отображения учебной информации может быть реализован с помощью вертикально установленного ряда равномерно рассредоточенных электрических лампочек так, что зажженные лампы будут соответствовать положению талевого блока, ротора и противозатаскивателя..Включение этих лампочек осуществляется с помощью пороговых устройств.Каждое из этих пороговых устройств включает цепь питания только одной определенной лампы, поэтому порог срабаты вания каждого порогового устройства определяется положением в вертикальном ряду включаемой им лампы.
Пороговые устройства могут быть реализованы с помощью усилителя, в цепи обратной связи которого включены стабилитроны.
Кроме того, в состав блока 4 отображения учебной информации входит световое табло, индицирующее ошибки, допускаемые обучающимся.
Тренажер работает следующим образом.
Перед включением тренажера кран 1 барабана, перекидную ручку 12,маховик 13 контроллера, рукоятку 14 ручного тормоза, пневматическую ручку 15, входящие в состав .пульта
1 оператора, устанавливают в исходные положения, характеризующие исходное состояние тренажера. Кроме того, инструд тор с помощью движка потенциометра,входящего в функциональный преобразователь 10, задает длину буровой колонны.
При включении тренажера на датчи
16крана барабана, на датчик 17 перекидной ручки, на датчик 18 рукоятки ручного тормоза, на датчик 19 пневматической ручки поступают сигналы соответственно с крана 11 барабана, перекидной ручки 12 рукоятки ручного тормоза, пневматической ручки 15. По четвертому входу блока 7 моделирования привода поступает сигнёш с маховика 13 контроллера по первому выходу пульта 1 оператора. При исходном состоянии тренажера равны нулю напряжения на выходах датчика 16 крана барабана, датчика
17перекидной ручки, датчика 19 пневматической ручки, и максимально напряжение на выходе датчика 18 рукоятки ручного тормоза. В соответствии с этим максимально напряжение на выходе сумматора 6, равно нулю напряжение на выходе блока 7 моделирования привода, а на выходе функционального преобразователя 10 величина напряжения соответствует заданной длине буровой колонны.
При включении тренажера на блоке 4 отображения учебной информации из всех лампочек, установленных в вертикальном ряду, зажжены только те, которые обозначают положение ротора - ограничение хода буровой колонны снизу, положение противозатаскивателя - ограничение хода буровой колонны сверху и нижнее исходное положение талевого блока. Для этого блок. 2 задания эталонов подает по второму входу блока 4 отображения учебной информации два напряжения, одно из которых соответствует положению ротора, а другое - положению противозатаскивателя. Эти напряжения зажигают лампочки, положение которых в вертикальном ряду соответствует положению ротора и противозатаскивателя. Одновременно с эти с имитатора 9 колебательных движе.НИИ по третьему входу блока 4 отображения учебной информации поступает напряжение, величина которого соответствует положению талевого блока. Так как талевый блок при ,включении тренажера находится в исiходном нижнем состоянии, то выходное напряжение имитатора 9 колебательных движений равно нулю. Под , действием этого напряжения срабатывает соответствующее пороговое устройство блока 4 отображения учебной информации, зажигающее лампочку, положение которой в вертикальном ряду соответствует положению талевого блока в рассматриваемой момент времени.
Для отработки навыков подъема бу ровой колонны обучающийся включает кран 11 барабана, передвигая рукоятку крана с Выключено на Тихий до упора. При воздействии обучающегося на кран 11 барабана напряжение на ходе датчика 16 крана барабана изменяется пропорционально перемещению крана 11 барабана. Поэтому при установке крана 11 барабана в крайнее до упора положение напряжения на вы5 ходе датчика 16 крана барабана принимает свое, наибольшее значение и, поступая на второйвход узла 23 моделирования муфты,,обеспечивает полное включение муфты.
0 . Далее обучающийся плавно вращает маховик 13 контроллера. В результате этого напряжение, пропорциональное положению маховика контроллера по первому выходу пульта 1 оператора
5 и четвертому входу блока 7 моделирования привода, поступает на второй вход узла 21 моделирования электродвигателя, воспроизводя в нем процессы, аналогичные процессам в
Q реальном электродвигателе. Поэтому напряжение на выходе узла 21 моделирования элактродвигат-еля будет изменяться в соответствии с изменением скорости вращения вала электродвигателя.
Для того, чтобы учесть зависимость скорости вращения вала электродвигателя от веса буровой колонны, на первый вход узла 21 моделирования электродвигателя по второму
0 входу блока 7 моделирования привода с выхода функционального преобразователя 10 поступает напряжение, пропорциональное весу буровой колонны.
5 Напряжение с выхода узла 21 моделирования электродвигателя поступает на второй вход узла 22 моделирования редуктора, на первый вход которого по пятому ВХОДУ блока 7
0 моделирования привода и второму выходу пульта 1 оператора с выхода датчика 17 перекидной ручки поступает напряжение, пропорциональное . перемещению перекидной ручки.
5 Узел 22 моделирования редуктора под действием этих напряжений формирует на своем выходе напряжение, пропорциональное скорости вращения выходного вала редуктора.
0 Напряжение с выхода узла 22 моделирования редуктора поступает на третий вход узла 23 моделирования муфты. Так как в рассматриваемом примере кран 11 барабана переве5 Д6Н в крайнее до упора положение.
а напряжение на втором входе узла 23 моделирования муфты максимально и обеспечивает взаимное прижатие ведущих и ведомых дисков муфты,то скорости вращения выходного и входного валов муфты равны. При этом в конце подъема для получения малых перемещений талевого блока обучающийся не доводит кран 11 барабана до упора, поэтому напряжение на втором входе узла 23 моделирования муфты не обеспечивает полного при-, жатия ведущих и ведомых дисков муфты, следовательно, за счет взаимной пробуксовки дисков муфты скорость вращения выходного вала меньше скорости вращения ее входного вала.
Для того, чтобы учесть зависимость скорости вращения выходного вала муфты от веса буровой колонны, на первый вход узла 23 моделирования муфты по третьему входу блока 7 моделирования привода с выхода функционального преобразователя 10 поступает напряжение, пропорциональное весу буровой колонны.
Напряжение с выхода узла 23 моделирования муфты поступает на второй вход узла 24 моделирования барабана, воспроизводящего процессы, аналогичные процессам в реальном барабане. Поэтому напряжение на выходе узла 24 моделирования барабана соответствует углу поворота барабана. Для оттормаживания барабана обучающийся поднимает рукоятку 14 ручного тормоза. Датчик 18 рукоятки ручного тормоза при этом формирует на своем выходе напряжение, пропорциональное перемещению рукоятки 14 ручного тормоза, которое поступает на третий вход блока 15 элементов ИЛИ. В случае оттормаживания барабана пневматической ручкой 15 напряжение на выходе датчика 19 пневматической ручки изменяется пропорционально перемещению пневматической ручки 15, и напряжение на выходе узла 20 моделирования пневмосистемы тормоза соответствует величине давления воздуха, на входе тормоза, так как узел 20 моделирования пневмосистемы тормоза воспроизводит процессы,аналогичные процессам в реальной пневмосистеме.
1
Сумматор 6 по поступающему с
выхода функционального преобразователя 10 напряжению, соответствующему весу буровой колонны, и поступающим через блок 5 элементов ИЛИ с выхода узла 20 моделирования пневмосистемы тормоза напряжению, соответствующему величине давления воздуха на выходе пневмосистемы, и напряжению с выхода датчика 18 рукоятки ручного тормоза, воспроизводит процессы, аналогичные процессам в реальном тормозе. Поэтому напряжение на выходе сумматора 6 соответствует тормозному усилию. Следовательно, при оттормаживании бара бана или с помощью рукоятки 14 ручного тормоза, или с помощью пневматической ручки 15 выходное напряжение сумматора 6, соответствующее величине тормозного усилия, уменьшается и, воздействуя на первый
вход узла 24 моделирования барабана, увеличивает его выходное напряжение, что соответствует разгону барабана по мере оттормаживания. Напряжение с выхода узла 24 модели5 рования барабана поступает через делитель 8 напряжения на первый вход имитатора 9 колебательных движений, на второй вход которого поступает напряжение с выхода функцио0 Цельного преобразователя 10, пропорциональное весу буровой колонны.
Имитатор 9 колебательных движений воспроизводит процессы, аналогичные процессам в реальной талевой
5 системе,. Поэтому напряжение на выходе имитатора 9 колебательных движений изменяется в соответствии с изменением высоты подъема Тсшевого блока.
Q Напряжение с выхода имитатора 9 колебательных движений поступает на второй вход блока 3 сравнения, на первый вход которого поступаг г два напряжения с блока 2 задания эталонов. Одно из напряжений, формируемых блоком 2 задания эталонов, соответствует положению ротора, а дру- гое - положению противозатаскивателя.
0 .Если действия обучающегося при отработке навыков подъема буровой i колонны ошибочны и характеризуются переподъемом буровой колонны, то в момент переподъема в блоке 3 срав5 нения наступает равенство напряжения, снимаемого с выхода имитатора 9 колебательных движений, соответствующего положению талевого блока,с напряжением, снимаемым с выхода блоQ ка 2 задания эталонов, соответствующим положению противозатаскивателя. В этот момент блок 3 сравнения вырабатывает на своем выходе напряжение, поступающее по второму входу блока 4 отображения учебной информации на световое табло, которое выдает обучающемуся информацию об сшибке - переподъеме буровой колонны. Таким образом, имея информацию о текущем положении талевого блока,
0 обучающийся имеет возможность точно соизмерить свои управляющие воздействия на органы управления подъемом буровой колонны.
По мере подъема буровой колонны
5 напряжение, поступающее с выхода
имитатора 9 колебательныхдвижений на третий вход влока 4 отображения учебной.информации, возрастает, и в I соответствии с этим поднимается уро вень загорания лампочек блока 4 отобргикения учебной информации.
Для прекращения подъема буровой 1КОЛОННЫ обучающийся останавливает Электродвигатель, воздействуя на маховик 13 контроллера, в результате чего прекращается рост напря-жений на выходах блока t моделирования привода и имитатора 9 колебательных движений.
Одновременно с этим обучгиощийся воздействует на рукоятку 14 ручного тоЕЯноза или пневматичес- кую ручку 15 для более эффективного прекращения подъема буровой колонны При этом на выходе сумматора 6 формируется напряжение, пропорциональное тормозному усилию, величина которого задается обучающимся. Это напряжение с выхода сумматора 6, , поступая на первый вход узла 24 моделирования барабана, форсир} ет прекращение роста напряжений на выходах узла 24 моделирования барабана И имитатора 9 колебательных движений.
В момент полного останова талевого блока напряжение на выходе ими татора 9 колебательных движений постоянно и соответствует поднятому .положению талевого блока, и на блоке 4 отображения учебной информации будет зажжена лампочка, соответствующая этому положению. Отработка навыков спуска буровой колонны происходит аналогично при соответствующем порядке управления обучающимся органами спуска буровой
колонны.
Использование тренажера буровика по сравнению с известным позволяет обучающемуся значительно быстрее приобрести навыки управления буровой установкой при проведении спускоподъемных операций} отработать навыки работы в условиях учебного класса высвободить дорогостоящее обору|дование (буровую установку) от учеб,ных целей.
Экономический эффект от использования изобретения может быть получен за счет ускорения процесса обучения и снижения затрат на обучение рабочих.

| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер буровика | 1984 |
|
SU1213495A1 |
| Тренажер токаря | 1986 |
|
SU1368908A1 |
| Тренажер крановщика | 1983 |
|
SU1108484A1 |
| Устройство для обучения работе на металлорежущих станках | 1981 |
|
SU982068A1 |
| Тренажер для формирования навыков управления металлорежущим станком | 1980 |
|
SU911591A2 |
| Тренажер для формирования навыков управления металлорежущим станком | 1981 |
|
SU1030834A2 |
| Устройство для обучения работе на металлорежущих станках | 1982 |
|
SU1051558A1 |
| Тренажер оператора грузоподъемных устройств | 1977 |
|
SU750550A1 |
| Тренажер оператора грузоподъмной машины | 1979 |
|
SU862174A1 |
| Тренажер-имитатор бурового станка | 2019 |
|
RU2725451C1 |
ТРЕНАЖЕР БУРОВИКА, содержащий пульт оператора и последовательно включенные блок задания эта-лонов, блок сравнения и блок отображения учебной информации, второй вход которого соединен с выходом блока задания эталонов, отличающийся тем, что, с целью расширения дидактических возможностей тренажера, в него введены последовательно включенные блок элементов ИЛИ, сумматор, блок моделирования привода, делитель напряжения и имитатор колебательных движений, выход которого соединен с вторым входом блока сравнения и с третьим входом блока отображения учебной информации, и функциональный преобразователь, выход которого подключен к второму и третьему входам блока моделирования привода, к второму входу имитатора колебательных движений и к первому входу сумматора,пер(О вый, второй, третий, четвертый и пятый выходы пульта оператора соединены соответственно с четвертым, пятым и шестым входами блока моделирования привода и с вторым и третьим входами блока элементов ИЛИ.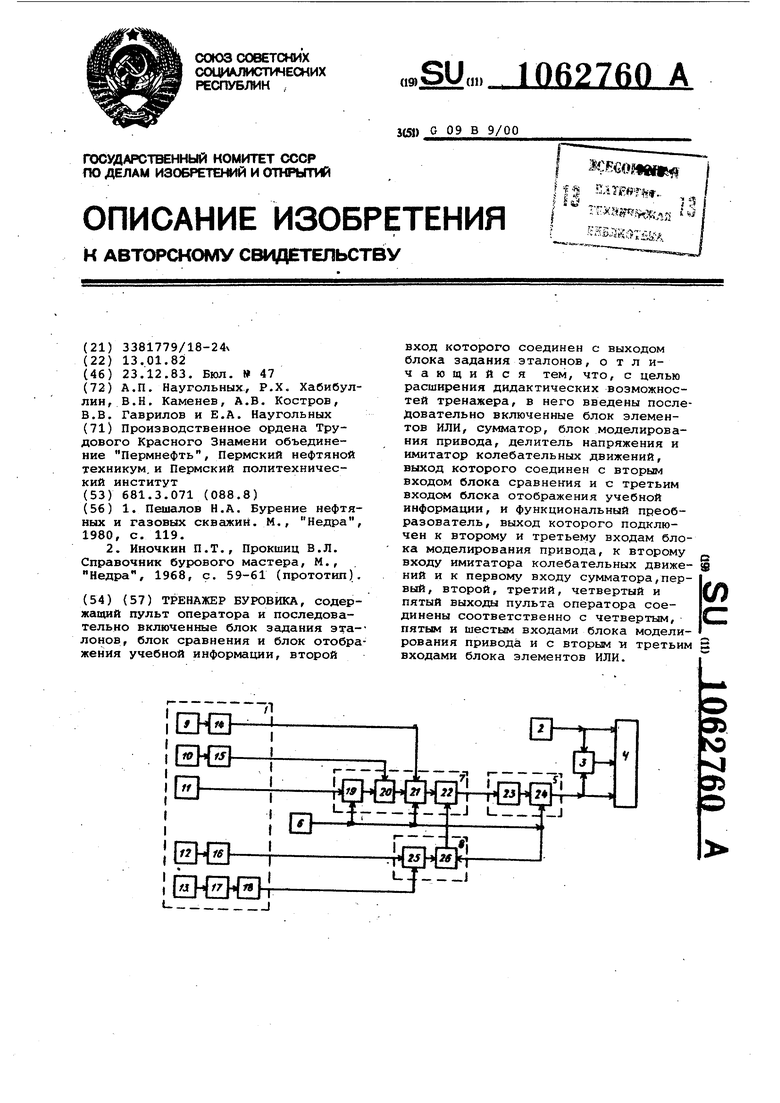
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пешалов Н.А | |||
| Бурение нефтяных и газовых скважин | |||
| М., Недра, 1980, с | |||
| Способ получения камфоры | 1921 |
|
SU119A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Иночкин П.Т., Прокшиц В.Л | |||
| Справочник бурового мастера, М., Недра, 1968, с | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
