3 а второй вход подключен, соответственно к И1шертору, тахогенератору, вал которого сочленен с валом электродвигателя, и связан с вторым входом первого сумгматора, первый вход которого объединен , -..,,. с вторым входом второго сумматора 2 J . В известном устройстве сигнал обратнон связи по скорости поступает на сумматоры и уменьшает величину сигналов смещения, тем самым уменьшая коэффициент усиления системы при то| южении. Таким образом в данном устройстве исключается возможность возникновения искрения на коллекторе эпектродвигателя Однако уменьшение коэффициента усиления системы при разгоне электродвигателя затягивает время разгона электродвигателя, что приводит к ухудшению регулировочных характеристик электродвигателя. Целью изобретения являетгт улучшение регулировочных характеристик электр двигателя постоянного тока за счет предупреждения уменьшения коэффициента усиления системы при разгоне электродвигателя. Поставленная цель достигается тем, что в устройство введены соединенные между собой блок определения режима и блок коммутации, причем блок- определе- зо ния режима соединен с блоком задания и выходом пропорционально-интегрирующего усилителя, вход блока коммутации подключен к второму входу четвертого сумматора и выходу инвертора, а выходы соответственно к второму входу первого сумматора и первому входу второго сум матора. Кроме того, блок коммутации выполнен в виде двух переключающих контакторов, причем подвижные контакты образуют выходы блока коммутации, а попарно объединенные первые и вторые неподвижные контакты контакторов образуют входы блока коммутации.
Блок определения режима содержит два элемента определения полярности, две схемы НЕ и две схемы И, выход Каждого элемента определения полярности сигнала подключен к входам схем И, причем к одной схеме И непосредственно а к другой - через схемы НЕ, причем входы элементов определения полярности сигнала образуют вход, а выходы схем И - выход блока определения .режима.
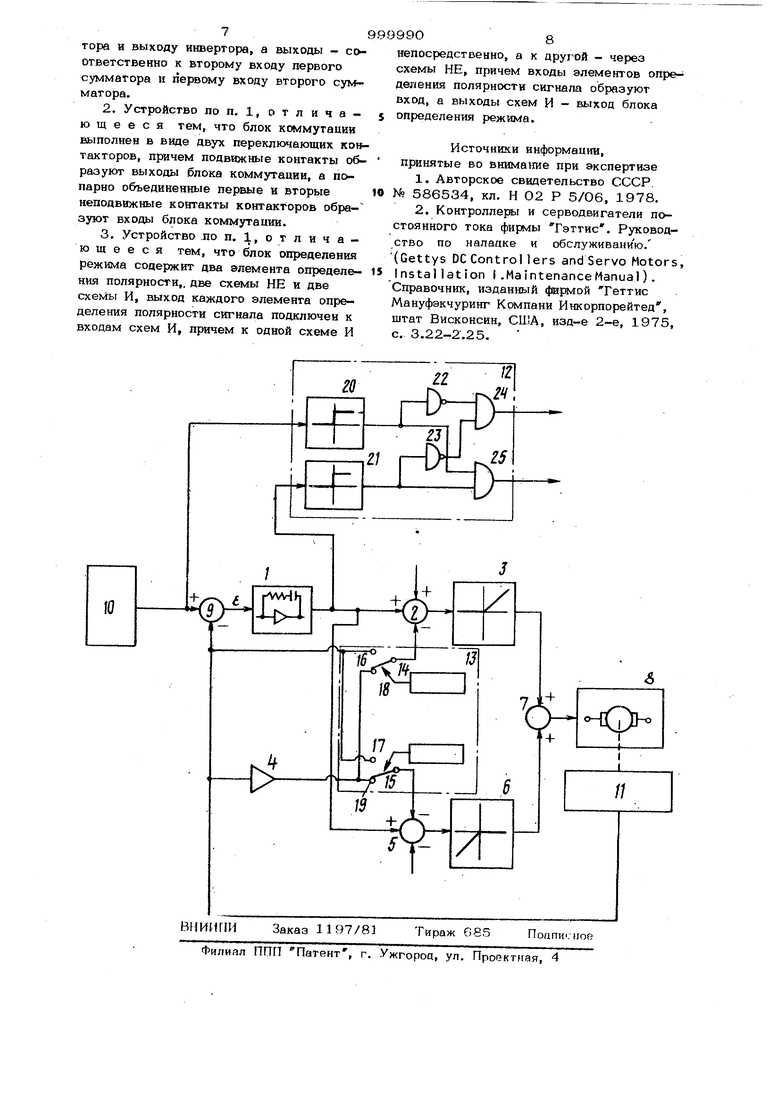
На чертеже изображена блок-схема устройства.
Устройство для регулирования скорости и.чектродвигателя содержит две цели.
схемы 22 и 23 НЕ, прпчем входы элементов 20 и 21 образуют вход, а выходы схем 24 и 2-5 И - выход блока 12 определения режима.
Устройство работает следующим образом.
Сигнал обратной связи по скорости 5, полученный от тахогенератора 11,соединенного с электродвигателем 8, непосредственно поступает на сумматор 2 изменения коэффициента усиления при пуске электродвигателя и через инвертор 4 поступает на сумматор изменения коэффициента усиления при торможении электродвигателя, В результате поступающие сигналы уменьшают величины сигналов смещения, поступающих на сумматоры 2 и 5, тем самым уменьшается коэффициент 9О4 одна из которых составлена из поииеаовательно соединенных пропориионально-интегрирующих усилителя 1, сумматора 2 и усилителя 3 мощности, а другая - из инвертора 4, связанного с первым входом сумматора 5, и усилителя 6 мощности, выходы усилителей 3 и 6 подключены к входам сумматора 7, выход которого снабжен выводами для подключения к якорной обмотке электродвигателя 8, вход пропорционально-интегрирующего усилителя 1 подключен к выходу сумматора 9, блок 10 задания, подключенный к первому входу сумматора 9, второй вход которого подключен, соответственно, к инвертору 4, тахогенератору 11, вал которого сочленен с валом электродвигателя 8 и связан с вторым входом сумматора 2, первый вход которого объединен со вторым входом сумматора 5, соединенные между собой блок 12 определения режима и блок 13 коммутации, причем блок 12 соединен с блоком 10 и с выходом пропорционально-интегрирующего усилителя 1, входы блока 3 коммутации подключены, соответственно, к второму входу сумматора 2 и к первому входу сумматора 5, Блок 13 коммутации выполнен в виде двух переключающих ко такторов, причем подвижные контакты 14 и 15 образуют выходы блока 13, а попарно объединенные неподвижные контакты 16,17 и 18, 19 образуют блока 13 коммутации. Блек 12 определения режима содержит два элемента 20 и 21 определения полярности, две схемы 22 и 23 НЕ, и две схемы 24 и 25 И, выходы элементов 2О и 21 подключены к входам схем 24 и 25 И, причем к схеме 25 И непосредственно, а к схеме 24 И - через усиления системы при. торможении электродвигателя. Выходные сигналы усилителей 3 и 6 мощности суммируются в сумматоре 7 для получения выходного сигнала, который поступает на электродвигатель 8 постоянного тока. В сумматоре 9 из сигнала блока 10 задания скорости SQ вччитается сигнал обратной связи по скорости S . Выходной сиг нал сумматора 9 поступает на усилятель 1, эта схема вырабатывает выходной сигнал А , пропоршюнальный значению сигнала 6- . Блок 12 определен ния режима предназначен для определени режима работы электродвигателя 8, Сигналы с выхода блока 10 задания и с выхода усилителя 1 поступают на вх ды блока 12 определения полярности. В блоке 12 с помощью элементов 20 и 21 определения полярности определяется полярность сигнала Sc полярность сигналаА . Элемент 20 определения полярности вырабатывает выходной сигнал О в случае прихода отрицательного входного сиг|1ала, что соответствует команде на торможение и вырабатывает выходной сигнал в случае прихода положительного сигнала, соответствук щего команде на разгон электродвигателя. Элемент 21 определения полярности вырабатывает выходной сигнал О по приходу отрицательного входного сигнала, представляющего отрицательное зна чение Ag, в случае, когда сигнал обратной связи по скорости S- больше сигна.ла заданной скорости Sc. и вырабатывает выходной сигнал Ino приходу положительного входного сигнала, представляющего положительное значение Ag в случае, когда сигнал заданной скорости Sr больше сигнала рбрятной связи по скорости SQ. Выходные сигналы элементов 20 и 21 определения полярности сравниваются схе мами НЕ 22 и 23 и схемами И 24 и 25, Схема И 25 вырабатывает на выход выходкой сигнал лишь тогда, когда оба выходных сигнала элементов 2О и 21 определения полярности равны 1, а схема И 24 вырабат1 1вает на выходе 18 в этом случае сигнал О. Тогда неподвижный контакт 18 замыкается, так как на обмотку реле поступает напряжение, а неподвижный.контакт 19 замыкает ся, так как на обмотку реле не поступает напряжение. Схема И 24 вырабатывает выходной сигнал 1 лишь тогда, ког да оба выходных сигнала элементов 2О и 21 определения полярности равны нулю а схема И 25 вырабатывает в это время выходной сигнал О; при этом замыкаются неподвижные контакты 17 и неп: движный контакт 16 иа-эа снятия напряжения с контактора 26 РЬ -А. Подвижные контакты 28 и 29 являются выходами блока коммутации с неподвижными контактами 17. Когда выходные сигналы элементов 2О и 21 определения полярности равны оба или единице или нулю, то полярность сигнала, соответствующего заданной скорости So и полярность сигнала Ag , равного А ()t будут выражены согласно одному из двух случаев 5с, и A/Sc-S5/ O;, Зо. и A/SC, -Sj/CO. Таким образе, в предлагаемом уст ройстве учитывается режим работы электродвигателя, что позволяет обеспечить хорошие регулировочные характеристики электродвигателя. Формула изобретения 1. Устройство для регулирования скорости электродвигателя, содержащее две цепи, одна из которых составлена из последовательно соединенных пропорционально-интегрирующего усилителя, первого сумматора и усилителя мощности, а другая - из инвертора, связанного с первым входом второго сумматора, и усилителя мощности, выходы усилителей моин ности подключены к входам третьего сумматора, выход которого сиабжен, выводами для подключения к якорной обмотке электродвигателя, вход пропорциональноинтегрирующего усилителя подключен к выходу четвертого сумматора, к первому входу которого подключен блок задания, а второй вход подключен, соответственно, к инвертору, тахогенератору, вал которого сочленен с электродвигателя, и связан с вторым входом первого сумматора, первый вход которого объединен с вторым входом второго cyMwtaTopa, отличающееся тем, что, с целью улучшения регулировочных характеристик электродвигателя постоянного тока, в него дополнительно введены соеди1Ш1}ные между собой блок (шределения режима и блок коммутации, причем блок определения peжшvta соединев с блоком задания и выходом пропорционально-интегрирующего, усилителя, вход блока коммутации подключен к второму входу четвертого сумма-
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный электропривод постоянного тока | 1979 |
|
SU1056930A3 |
| Устройство для управления асинхронным двигателем | 1979 |
|
SU1192641A3 |
| Электропривод переменного тока | 1979 |
|
SU1450765A3 |
| Система управления для остановки шпинделя в определенном угловом положении | 1980 |
|
SU1308185A3 |
| Асинхронный электропривод | 1981 |
|
SU1327806A3 |
| Устройство для останова шпинделя в заданном положении | 1980 |
|
SU1165226A3 |
| Устройство для управления шаговым двигателем | 1974 |
|
SU552913A3 |
| Электропривод переменного тока | 1980 |
|
SU1114358A3 |
| Устройство для управления остановом шпинделя в заданном положении | 1980 |
|
SU1175357A3 |
| Электропривод постоянного тока | 1979 |
|
SU1102497A3 |
